









0. 环境
- 亚博智能的ROSMASTER-X3
- RDK X3 1.0
0.1 资料
文档资料
https://www.slamtec.com/cn/Support#rplidar-a-series
SDK
https://github.com/slamtec/rplidar_sdk
ROS
https://github.com/slamtec/rplidar_ros
https://github.com/Slamtec/sllidar_ros2
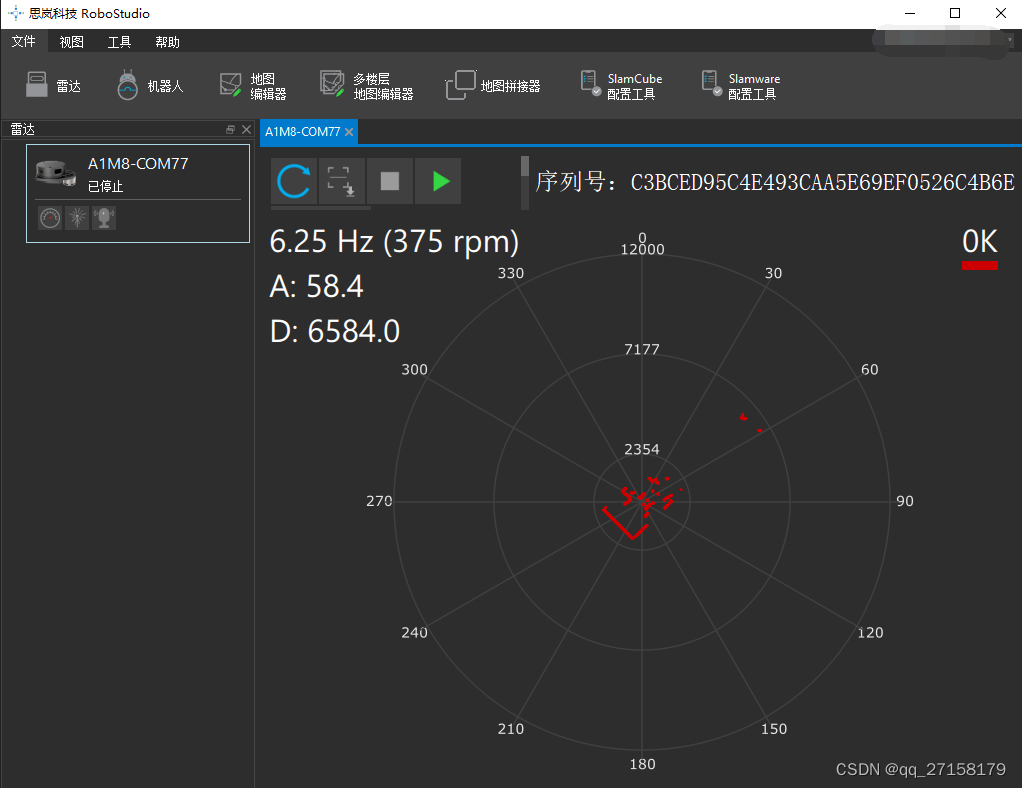
1. robostudio(win10下操作)
下载安装包
https://www.slamtec.com/cn/robostudio
安装
双击 install_robostudio.exe ->
-> 下一步
-> 安装文件夹
-> D:\Slamtec\RoboStudio
-> 下一步
-> 选择组件
-> 下一步
-> 开始菜单快捷方式
-> 下一步
-> 已做好安装准备
-> 安装
-> 下一步
-> 完成
打开桌面的 Slamtec RoboStudio
新用户注册,注册后才可以使用。win10下测试正常后,可以试试嵌入式板卡。
2. sdk(ubuntu20下操作)
2.1 获取源码
获取源码
git clone https://github.com/slamtec/rplidar_sdk
压缩备份
7z a rplidar_sdk_git_src_20240318.7z rplidar_sdk2.2 连接设备
发现CP2102串口转TTL无法顺利挂载到虚拟机。
设备管理器 -> 点击 Silicon Labs CP2102x USB to UART Bridge(COM60)-> 右键 -> 属性 -> 电源管理 -> 取消勾选 允许计算机关闭此设备以节约电源
串口权限
ls /dev/ttyUSB*
sudo chmod 777 /dev/ttyUSB1永久修改
whoami
该用户添加至dialout用户组,因为tty设备是属于dialout用户组
sudo usermod -aG dialout sunrise2.3 编译
cd rplidar_sdk
make -j42.4 检测A1
是否识别USB设备
lsusb
(A1上的TTL转USB)Bus 001 Device 012: ID 10c4:ea60 Silicon Labs CP210x UART Bridge
查看串口号:
dmesg|grep tty
[ 828.177513] usb 1-1.3.1: cp210x converter now attached to ttyUSB1
2.5 运行
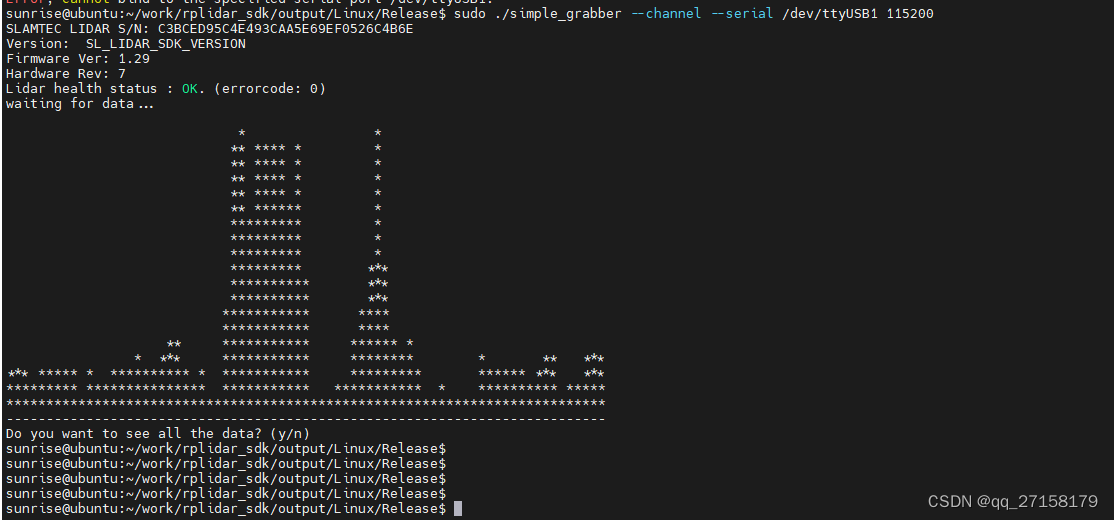
cd output/Linux/Release
sudo ./simple_grabber --channel --serial /dev/ttyUSB1 115200
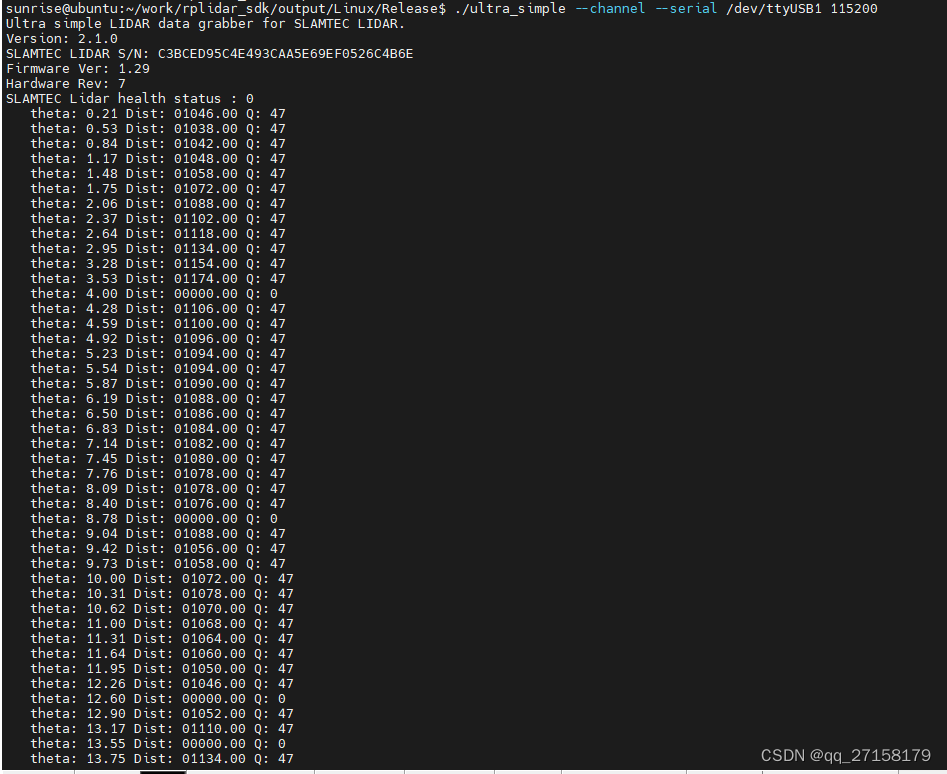
sudo ./ultra_simple --channel --serial /dev/ttyUSB1 1152002.5.1 命令行程序simple_grabber
2.5.2 还是命令行ultra_simple















 5020
5020

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









