







算子
狭义的算子实际上是指从一个函数空间到另一个函数空间(或它自身)的映射。
广义的算子的定义只要把上面的空间推广到一般空间,可以是向量空间,赋范向量空间,内积空间,或更进一步,Banach空间,Hilbert空间都可以。算子还可分为有界的与无界的,线性的与非线性的等等类别。
边缘提取与梯度

如上图,在画圈处有明显的像素值变化,这就是图像中的边缘
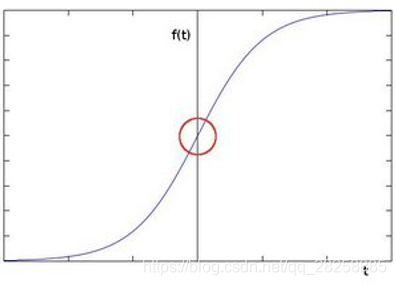
上图,是图像像素的变化图
圆圈处就是和源图像对应的点。可以看出,这里的变化率是最大的
变化率也称梯度
谈及变化率,我们就要想到导数
如下图
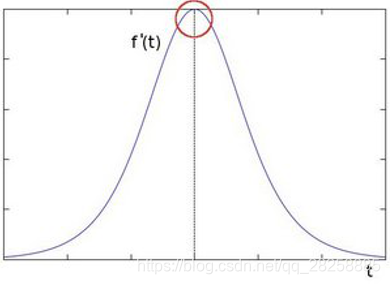
边缘提取
边缘是什么 – 像素值发生跃迁的地方
是图像的显著特征之一,在图像特征提取、对象检测、模式识别等方面都有重要的作用。
如何捕捉/提取边缘 – 对图像求它的一阶导数
delta = f(x) – f(x-1)
delta越大,说明像素在X方向变化越大,边缘信号越强
在opencv中,我们只需要使用Sobel算子就可以提取边缘,不用再使用求导操作
Sobel算子
原理
Sobel算子又叫索贝尔算子,是计算机视觉领域的一种重要处理方法。
主要用于获得数字图像的一阶梯度,常见的应用和物理意义是边缘检测。
Sobel算子是把图像中每个像素的上下左右四领域的灰度值加权差,在边缘处达到极值从而检测边缘。
Sobel算子所采用的算法是先进行加权平均,然后进行微分运算,算子的计算方法如下:
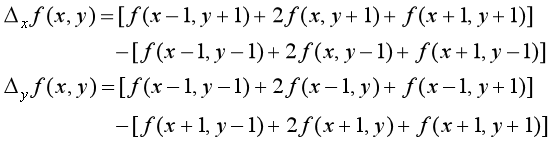
对于一个二元函数f(x,y)来说,x有三个取值,y有三个取值,那我们就可以构造一个3×3的矩阵,矩阵的中心点为(x,y),向上向左为减一,向右向下为加一。我们用矩阵来表示一下上面的式子: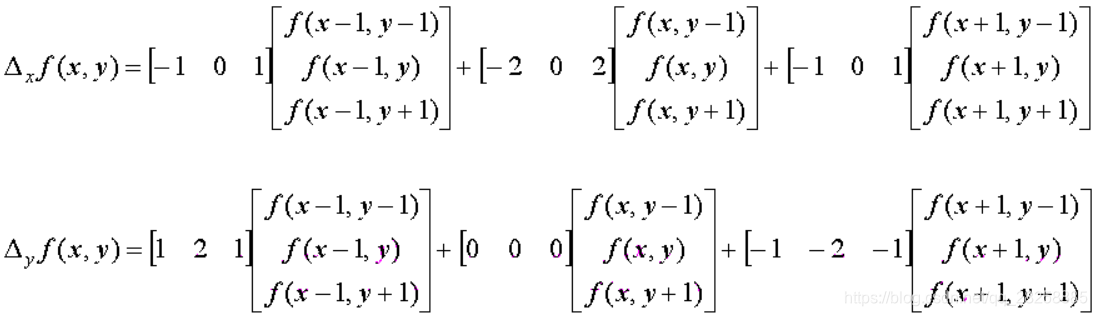
由此,我们设计两个核,一个是x方向上的,一个是y方向上的,设计的两个核是3×3的矩阵,分别是:
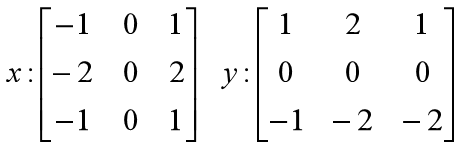
所以,如果对于一个图像I,我们能通过这两个核分别计算该图像X方向和Y方向的梯度:
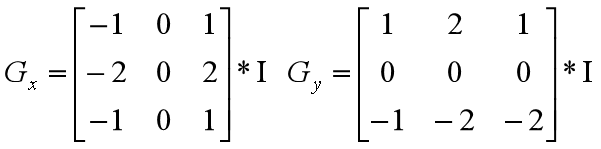
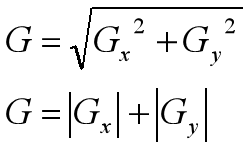
我们也能根据两个方向的梯度计算总的梯度:
第二个式子是第一个式子的近似计算,这是由于CPU乘除的开销远大于加减
所以会这么用
Sobel算子对噪声比较敏感,在使用前建议高斯模糊去噪再使用Sobel算子进行边缘提取
API
void Sobel(
InputArray src,
OutputArray dst,
int ddepth,
int dx,
int dy,
int ksize = 3,
double scale = 1,
double delta = 0,
int borderType = BORDER_DEFAULT
);
(1)InputArray类型的src ,输入图像。
(2)OutputArray类型的dst ,输出图像,图像的大小、通道数和输入图像相同。
(3)int类型的ddepth,输出图像深度,请参阅@ref filter_depth“组合”;如果是8位输入图像,则会导致导数截断。
计算sobel的时候有负,一边黑一边白就变成500多了。如果我们的depth是-1,输入图像是CV_8U的灰度图像,输出也是CV_8U。那么超过255的就会被截断,与实际数值不吻合。所以输出图像的位数要比输入高,比如输入CV_8U,输出就要用CV_16S(4)int类型的dx,导数x的阶数。
(5)int类型的dy,导数y的阶数。
(6)int类型的ksize,扩展Sobel内核的大小;它必须是1、3、5或7。
(7)double类型的scale,计算派生值的可选比例因子;默认情况下,不应用缩放(有关详细信息,请参见cv::getDerivKernels。
(8)double类型的delta,在将筛选的像素存储到dst中之前添加到这些像素的可选值。说的有点专业了其实就是给所选的像素值添加一个值delta。
(9)int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT。
我们还用了一个很简单的函数,用于计算绝对值
void convertScaleAbs(
InputArray src,
OutputArray dst,
double alpha= 1,
double belt= 0,
);
我们这个函数只需要设置前两个参数,这个函数可以计算图像src的像素绝对值,输出到图像dst。
代码展示
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src, gx, gy, dst;
src = imread("C:/Users/86176/Pictures/pics/lena(1).tiff");
if (!src.data)
{
cout << "could not load image !";
return -1;
}
imshow("【输入图像】", src);
Mat tmp,gray;
GaussianBlur(src, tmp, Size(3,3), 0, 0);
cvtColor(tmp, gray, CV_BGR2GRAY);
Sobel(gray, gx, CV_16S, 1, 0,3);
Sobel(gray, gy, CV_16S, 0, 1,3);
convertScaleAbs(gx, gx);
convertScaleAbs(gy, gy);//若不用绝对值,那么产出的图像就会缺失很多细节
addWeighted(gx, 0.5, gy, 0.5, 0, dst);
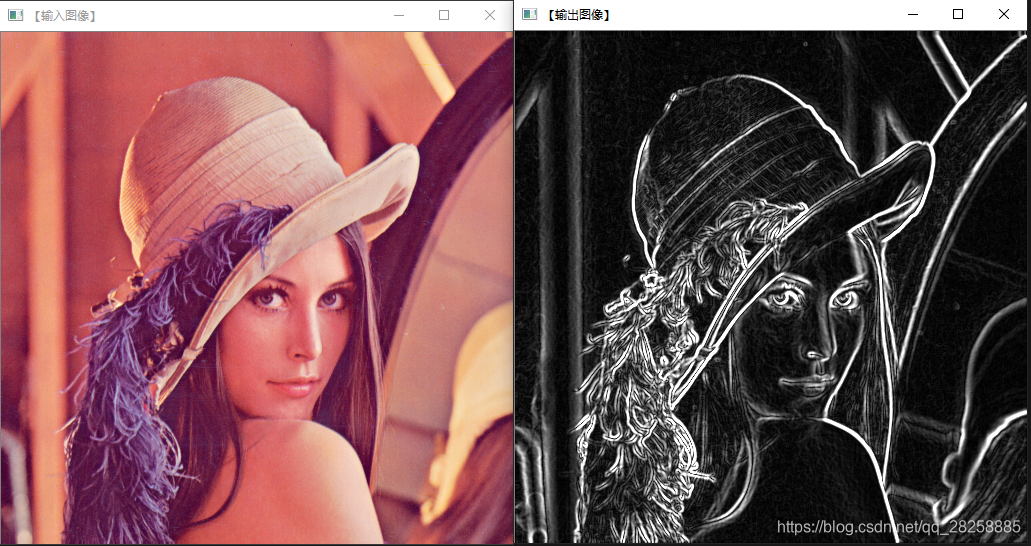
imshow("【输出图像】", dst);
waitKey(0);
return 0;
}
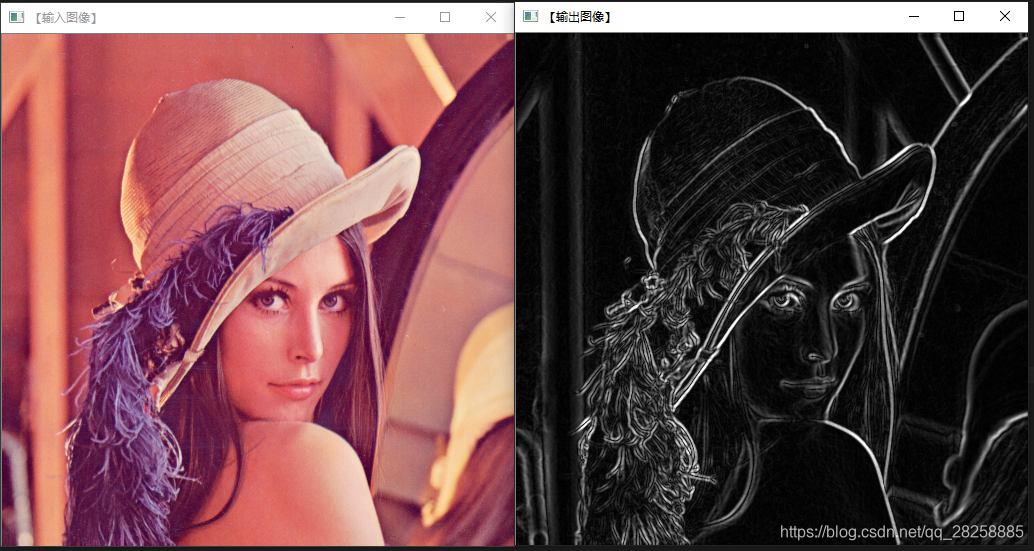
结果
优化代码
我们在上述代码使用的是加权相加,并非是绝对值相加
我们现在来优化代码
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src, gx, gy, dst;
src = imread("C:/Users/86176/Pictures/pics/lena(1).tiff");
if (!src.data)
{
cout << "could not load image !";
return -1;
}
imshow("【输入图像】", src);
Mat tmp,gray;
GaussianBlur(src, tmp, Size(3,3), 0, 0);
cvtColor(tmp, gray, CV_BGR2GRAY);
Sobel(gray, gx, CV_16S, 1, 0);
Sobel(gray, gy, CV_16S, 0, 1);
convertScaleAbs(gx, gx);
convertScaleAbs(gy, gy);//若不用绝对值,那么产出的图像就会缺失很多细节
//addWeighted(gx, 0.5, gy, 0.5, 0, dst);
dst = Mat(gx.size(), gx.type());
//printf("type : %d\n", gx.type()); //这里能看到gx的type是0,即CV_8U,所以下面指针类型都是uchar
int width = dst.cols;
int height = dst.rows;
for (int row = 0; row < height; row++)
{
for (int col = 0; col < width; col++)
{ //每个取号绝对值的像素值都相加
int xg = gx.at<uchar>(row, col);
int yg = gy.at<uchar>(row, col);
int xy = xg + yg;
dst.at<uchar>(row, col) = saturate_cast<uchar>(xy);//指定像素值在0~255,防止被截断
}
}
imshow("【输出图像】", dst);
waitKey(0);
return 0;
}
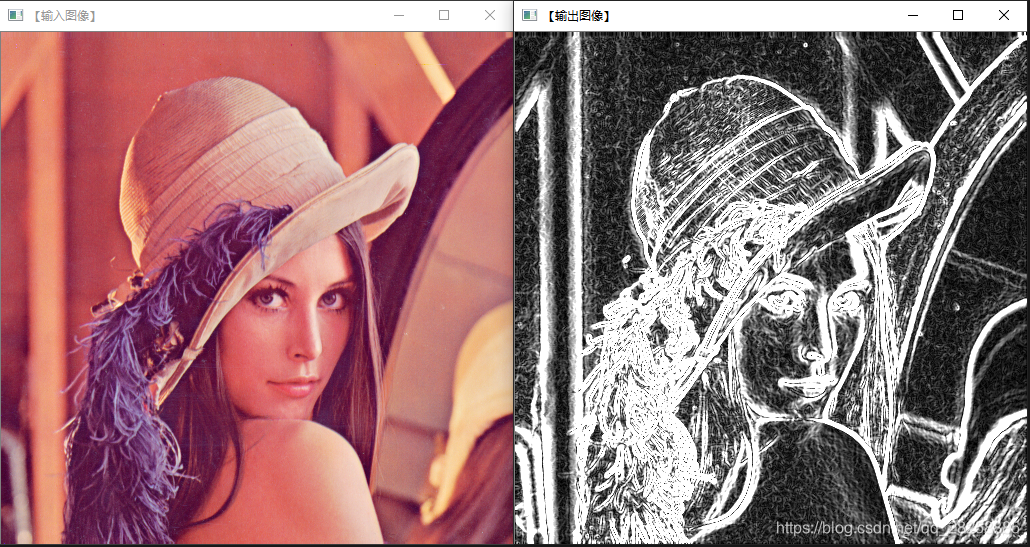
结果
可以看到,细节比上面加权相加多了很多
加权相加的结果如下
如果我们直接使用加权相加,丢失了一些细节,那么我们后续的处理可能会差的更远。所谓差之毫厘,谬以千里。
所以我们需要了解图像处理的本质。
Scharr算子
我们之前聊到梯度,即周围像素差值的变化率,要了解这个概念,我们就需要求导。
导数是对于连续函数来说的,图像差值不是连续的函数,所以这种方式,其实只是一个近似解。
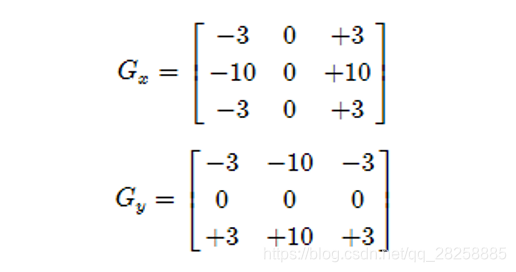
这种近似解,对于上面的来说又不是特别的精确,所以,在opencv中,采用更加精确的Scharr算子:
代码
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src, gx, gy, dst;
src = imread("C:/Users/86176/Pictures/pics/lena(1).tiff");
if (!src.data)
{
cout << "could not load image !";
return -1;
}
imshow("【输入图像】", src);
Mat tmp,gray;
GaussianBlur(src, tmp, Size(3,3), 0, 0);
cvtColor(tmp, gray, CV_BGR2GRAY);
Scharr(gray, gx, CV_16S, 1, 0);
Scharr(gray, gy, CV_16S, 0, 1);
//Sobel(gray, gx, CV_16S, 1, 0);
//Sobel(gray, gy, CV_16S, 0, 1);
convertScaleAbs(gx, gx);
convertScaleAbs(gy, gy);//若不用绝对值,那么产出的图像就会缺失很多细节
//addWeighted(gx, 0.5, gy, 0.5, 0, dst);
dst = Mat(gx.size(), gx.type());
//printf("type : %d\n", gx.type()); //这里能看到gx的type是0,即CV_8U,所以下面指针类型都是uchar
int width = dst.cols;
int height = dst.rows;
for (int row = 0; row < height; row++)
{
for (int col = 0; col < width; col++)
{ //每个取号绝对值的像素值都相加
int xg = gx.at<uchar>(row, col);
int yg = gy.at<uchar>(row, col);
int xy = xg + yg;
dst.at<uchar>(row, col) = saturate_cast<uchar>(xy);//指定像素值在0~255,防止被截断
}
}
imshow("【输出图像】", dst);
waitKey(0);
return 0;
}
结果
相较于Sobel,Scharr对图像的边缘有了更大的加强
即,Scharr对抗噪声的干扰强于Sobel
















 5514
5514











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











