








首先在V_m∩V_d的范围内采样速度:
allowable_v = generateWindow(robotV, robotModel)
allowable_w = generateWindow(robotW, robotModel)
然后根据能否及时刹车剔除不安全的速度:
for each v in allowable_v
for each w in allowable_w
dist = find_dist(v,w,laserscan,robotModel)
breakDist = calculateBreakingDistance(v)//刹车距离
if (dist > breakDist) //如果能够及时刹车,该对速度可接收
如果这组速度可接受,接下来利用评价函数对其评价,找到最优的速度组
BEGIN DWA(robotPose,robotGoal,robotModel)
laserscan = readScanner()
allowable_v = generateWindow(robotV, robotModel)
allowable_w = generateWindow(robotW, robotModel)
for each v in allowable_v
for each w in allowable_w
dist = find_dist(v,w,laserscan,robotModel)
breakDist = calculateBreakingDistance(v)
if (dist > breakDist) //can stop in time
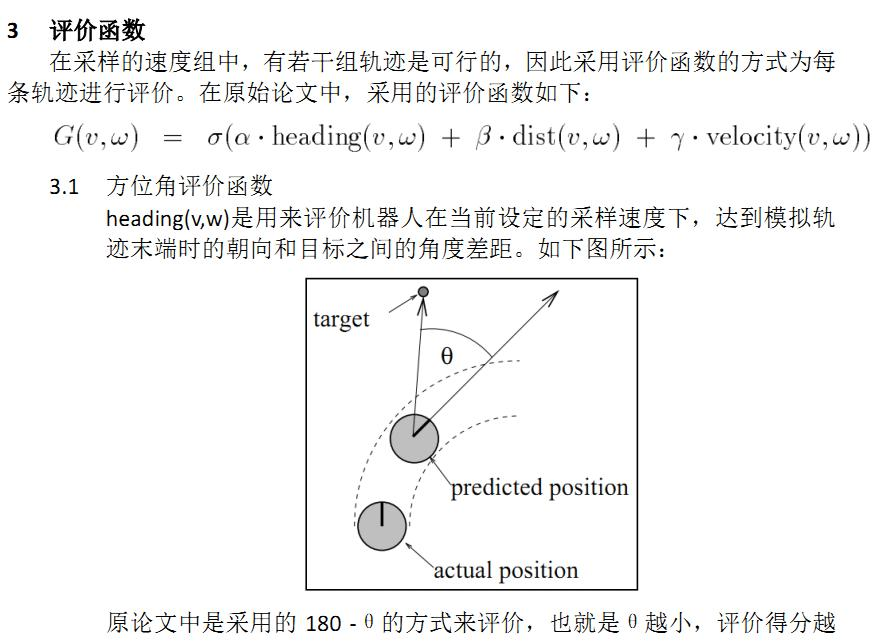
heading = hDiff(robotPose,goalPose, v,w)
//clearance与原论文稍不一样
clearance = (dist-breakDist)/(dmax - breakDist)
cost = costFunction(heading,clearance, abs(desired_v - v))
if (cost > optimal)
best_v = v
best_w = w
optimal = cost
set robot trajectory to best_v, best_w
END















 8579
8579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









