







使用lio-sam中的imageProjection.cpp
修改数据类型
因为我使用的robosense 16线激光雷达,而lio-sam支持的是velodyne或者ouster,lio-sam中的imageProjection.cpp订阅了‘velodyne’ or 'ouster’类型的激光。
如下所示 params.yaml 中
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
需要加入修改,将robosense的数据类型,修改为velodyne的类型,
rslidar点云格式
// rslidar和velodyne的格式有微小的区别
// rslidar的点云格式
struct RsPointXYZIRT {
PCL_ADD_POINT4D;
uint8_t intensity;
uint16_t ring = 0;
double timestamp = 0;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (RsPointXYZIRT,
(float, x, x)(float, y, y)(float, z, z)(uint8_t, intensity, intensity)
(uint16_t, ring, ring)(double, timestamp, timestamp))
vlp-16数据格式
struct VelodynePointXYZIRT
{
PCL_ADD_POINT4D
PCL_ADD_INTENSITY;
uint16_t ring;
float time;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (VelodynePointXYZIRT,
(float, x, x) (float, y, y) (float, z, z) (float, intensity, intensity)
(uint16_t, ring, ring) (float, time, time)
)
缓存pointcloud
bool cachePointCloud(const sensor_msgs::PointCloud2ConstPtr& laserCloudMsg)
{
// cache point cloud
cloudQueue.push_back(*laserCloudMsg);
if (cloudQueue.size() <= 2)
return false;
// convert cloud
currentCloudMsg = std::move(cloudQueue.front());
cloudQueue.pop_front();
if (sensor == SensorType::VELODYNE || sensor == SensorType::LIVOX)
{
pcl::PointCloud<RsPointXYZIRT>::Ptr pc(new pcl::PointCloud<RsPointXYZIRT>());
pcl::fromROSMsg(currentCloudMsg, *pc);
laserCloudIn->points.resize(pc->points.size());
laserCloudIn->is_dense = true;
for (int i = 0; i < pc->points.size(); ++i)
{
laserCloudIn->points[i].x = pc->points[i].x;
laserCloudIn->points[i].y = pc->points[i].y;
laserCloudIn->points[i].z = pc->points[i].z;
laserCloudIn->points[i].intensity = pc->points[i].intensity;
laserCloudIn->points[i].ring = pc->points[i].ring;
// 计算相对于第一个点的相对时间
laserCloudIn->points[i].time = float(pc->points[i].timestamp - pc->points[0].timestamp);
}
}
else if (sensor == SensorType::OUSTER)
{
// Convert to Velodyne format
pcl::moveFromROSMsg(currentCloudMsg, *tmpOusterCloudIn);
laserCloudIn->points.resize(tmpOusterCloudIn->size());
laserCloudIn->is_dense = tmpOusterCloudIn->is_dense;
for (size_t i = 0; i < tmpOusterCloudIn->size(); i++)
{
auto &src = tmpOusterCloudIn->points[i];
auto &dst = laserCloudIn->points[i];
dst.x = src.x;
dst.y = src.y;
dst.z = src.z;
dst.intensity = src.intensity;
dst.ring = src.ring;
dst.time = src.t * 1e-9f;
}
}
else
{
ROS_ERROR_STREAM("Unknown sensor type: " << int(sensor));
ros::shutdown();
}
// get timestamp
cloudHeader = currentCloudMsg.header;
timeScanCur = cloudHeader.stamp.toSec();
timeScanEnd = timeScanCur + laserCloudIn->points.back().time;
// check dense flag
if (laserCloudIn->is_dense == false)
{
ROS_ERROR("Point cloud is not in dense format, please remove NaN points first!");
ros::shutdown();
}
// check ring channel
static int ringFlag = 0;
if (ringFlag == 0)
{
ringFlag = -1;
for (int i = 0; i < (int)currentCloudMsg.fields.size(); ++i)
{
if (currentCloudMsg.fields[i].name == "ring")
{
ringFlag = 1;
break;
}
}
if (ringFlag == -1)
{
ROS_ERROR("Point cloud ring channel not available, please configure your point cloud data!");
ros::shutdown();
}
}
// check point time
if (deskewFlag == 0)
{
deskewFlag = -1;
for (auto &field : currentCloudMsg.fields)
{
if (field.name == "time" || field.name == "t" || field.name == "timestamp")
{
deskewFlag = 1;
break;
}
}
if (deskewFlag == -1)
ROS_WARN("Point cloud timestamp not available, deskew function disabled, system will drift significantly!");
}
return true;
}
去除运动畸变需要的数据
bool deskewInfo()
{
std::lock_guard<std::mutex> lock1(imuLock);
std::lock_guard<std::mutex> lock2(odoLock);
// make sure IMU data available for the scan
if (imuQueue.empty() || imuQueue.front().header.stamp.toSec() > timeScanCur || imuQueue.back().header.stamp.toSec() < timeScanEnd)
{
ROS_DEBUG("Waiting for IMU data ...");
return false;
}
imuDeskewInfo();
odomDeskewInfo();
return true;
}
其中imuDeskewInfo()和odomDeskewInfo()为使用imu和odom的数据来计算旋转量和平移量
void imuDeskewInfo()
{
cloudInfo.imuAvailable = false;
while (!imuQueue.empty())
{
if (imuQueue.front().header.stamp.toSec() < timeScanCur - 0.01)
imuQueue.pop_front();
else
break;
}
if (imuQueue.empty())
return;
imuPointerCur = 0;
for (int i = 0; i < (int)imuQueue.size(); ++i)
{
sensor_msgs::Imu thisImuMsg = imuQueue[i];
double currentImuTime = thisImuMsg.header.stamp.toSec();
// get roll, pitch, and yaw estimation for this scan
if (currentImuTime <= timeScanCur)
imuRPY2rosRPY(&thisImuMsg, &cloudInfo.imuRollInit, &cloudInfo.imuPitchInit, &cloudInfo.imuYawInit);
if (currentImuTime > timeScanEnd + 0.01)
break;
if (imuPointerCur == 0){
imuRotX[0] = 0;
imuRotY[0] = 0;
imuRotZ[0] = 0;
imuTime[0] = currentImuTime;
++imuPointerCur;
continue;
}
// get angular velocity
double angular_x, angular_y, angular_z;
imuAngular2rosAngular(&thisImuMsg, &angular_x, &angular_y, &angular_z);
// integrate rotation
double timeDiff = currentImuTime - imuTime[imuPointerCur-1];
imuRotX[imuPointerCur] = imuRotX[imuPointerCur-1] + angular_x * timeDiff;
imuRotY[imuPointerCur] = imuRotY[imuPointerCur-1] + angular_y * timeDiff;
imuRotZ[imuPointerCur] = imuRotZ[imuPointerCur-1] + angular_z * timeDiff;
imuTime[imuPointerCur] = currentImuTime;
++imuPointerCur;
}
--imuPointerCur;
if (imuPointerCur <= 0)
return;
cloudInfo.imuAvailable = true;
}
void odomDeskewInfo()
{
cloudInfo.odomAvailable = false;
while (!odomQueue.empty())
{
if (odomQueue.front().header.stamp.toSec() < timeScanCur - 0.01)
odomQueue.pop_front();
else
break;
}
if (odomQueue.empty())
return;
if (odomQueue.front().header.stamp.toSec() > timeScanCur)
return;
// get start odometry at the beinning of the scan
nav_msgs::Odometry startOdomMsg;
for (int i = 0; i < (int)odomQueue.size(); ++i)
{
startOdomMsg = odomQueue[i];
if (ROS_TIME(&startOdomMsg) < timeScanCur)
continue;
else
break;
}
tf::Quaternion orientation;
tf::quaternionMsgToTF(startOdomMsg.pose.pose.orientation, orientation);
double roll, pitch, yaw;
tf::Matrix3x3(orientation).getRPY(roll, pitch, yaw);
// Initial guess used in mapOptimization
cloudInfo.initialGuessX = startOdomMsg.pose.pose.position.x;
cloudInfo.initialGuessY = startOdomMsg.pose.pose.position.y;
cloudInfo.initialGuessZ = startOdomMsg.pose.pose.position.z;
cloudInfo.initialGuessRoll = roll;
cloudInfo.initialGuessPitch = pitch;
cloudInfo.initialGuessYaw = yaw;
cloudInfo.odomAvailable = true;
// get end odometry at the end of the scan
odomDeskewFlag = false;
if (odomQueue.back().header.stamp.toSec() < timeScanEnd)
return;
nav_msgs::Odometry endOdomMsg;
for (int i = 0; i < (int)odomQueue.size(); ++i)
{
endOdomMsg = odomQueue[i];
if (ROS_TIME(&endOdomMsg) < timeScanEnd)
continue;
else
break;
}
if (int(round(startOdomMsg.pose.covariance[0])) != int(round(endOdomMsg.pose.covariance[0])))
return;
Eigen::Affine3f transBegin = pcl::getTransformation(startOdomMsg.pose.pose.position.x, startOdomMsg.pose.pose.position.y, startOdomMsg.pose.pose.position.z, roll, pitch, yaw);
tf::quaternionMsgToTF(endOdomMsg.pose.pose.orientation, orientation);
tf::Matrix3x3(orientation).getRPY(roll, pitch, yaw);
Eigen::Affine3f transEnd = pcl::getTransformation(endOdomMsg.pose.pose.position.x, endOdomMsg.pose.pose.position.y, endOdomMsg.pose.pose.position.z, roll, pitch, yaw);
Eigen::Affine3f transBt = transBegin.inverse() * transEnd;
float rollIncre, pitchIncre, yawIncre;
pcl::getTranslationAndEulerAngles(transBt, odomIncreX, odomIncreY, odomIncreZ, rollIncre, pitchIncre, yawIncre);
odomDeskewFlag = true;
}
根据imu的数据计算rotation
void findRotation(double pointTime, float *rotXCur, float *rotYCur, float *rotZCur)
{
*rotXCur = 0; *rotYCur = 0; *rotZCur = 0;
int imuPointerFront = 0;
while (imuPointerFront < imuPointerCur)
{
if (pointTime < imuTime[imuPointerFront])
break;
++imuPointerFront;
}
if (pointTime > imuTime[imuPointerFront] || imuPointerFront == 0)
{
*rotXCur = imuRotX[imuPointerFront];
*rotYCur = imuRotY[imuPointerFront];
*rotZCur = imuRotZ[imuPointerFront];
} else {
int imuPointerBack = imuPointerFront - 1;
double ratioFront = (pointTime - imuTime[imuPointerBack]) / (imuTime[imuPointerFront] - imuTime[imuPointerBack]);
double ratioBack = (imuTime[imuPointerFront] - pointTime) / (imuTime[imuPointerFront] - imuTime[imuPointerBack]);
*rotXCur = imuRotX[imuPointerFront] * ratioFront + imuRotX[imuPointerBack] * ratioBack;
*rotYCur = imuRotY[imuPointerFront] * ratioFront + imuRotY[imuPointerBack] * ratioBack;
*rotZCur = imuRotZ[imuPointerFront] * ratioFront + imuRotZ[imuPointerBack] * ratioBack;
}
}
根据odom来计算position
void findPosition(double relTime, float *posXCur, float *posYCur, float *posZCur)
{
*posXCur = 0; *posYCur = 0; *posZCur = 0;
// If the sensor moves relatively slow, like walking speed, positional deskew seems to have little benefits. Thus code below is commented.
if (cloudInfo.odomAvailable == false || odomDeskewFlag == false)
return;
float ratio = relTime / (timeScanEnd - timeScanCur);
*posXCur = ratio * odomIncreX;
*posYCur = ratio * odomIncreY;
*posZCur = ratio * odomIncreZ;
}
去除畸变
PointType deskewPoint(PointType *point, double relTime)
{
if (deskewFlag == -1 || cloudInfo.imuAvailable == false)
return *point;
double pointTime = timeScanCur + relTime;
float rotXCur, rotYCur, rotZCur;
findRotation(pointTime, &rotXCur, &rotYCur, &rotZCur);
float posXCur, posYCur, posZCur;
findPosition(relTime, &posXCur, &posYCur, &posZCur);
if (firstPointFlag == true)
{
transStartInverse = (pcl::getTransformation(posXCur, posYCur, posZCur, rotXCur, rotYCur, rotZCur)).inverse();
firstPointFlag = false;
}
// transform points to start
Eigen::Affine3f transFinal = pcl::getTransformation(posXCur, posYCur, posZCur, rotXCur, rotYCur, rotZCur);
Eigen::Affine3f transBt = transStartInverse * transFinal;
PointType newPoint;
newPoint.x = transBt(0,0) * point->x + transBt(0,1) * point->y + transBt(0,2) * point->z + transBt(0,3);
newPoint.y = transBt(1,0) * point->x + transBt(1,1) * point->y + transBt(1,2) * point->z + transBt(1,3);
newPoint.z = transBt(2,0) * point->x + transBt(2,1) * point->y + transBt(2,2) * point->z + transBt(2,3);
newPoint.intensity = point->intensity;
return newPoint;
}
其中的核心为:
transBt = transStartInverse * transFinal
相对变换 = 起始时刻变换的逆 * 终止时刻的变换
然后再根据相对变换,对每个点进行变换
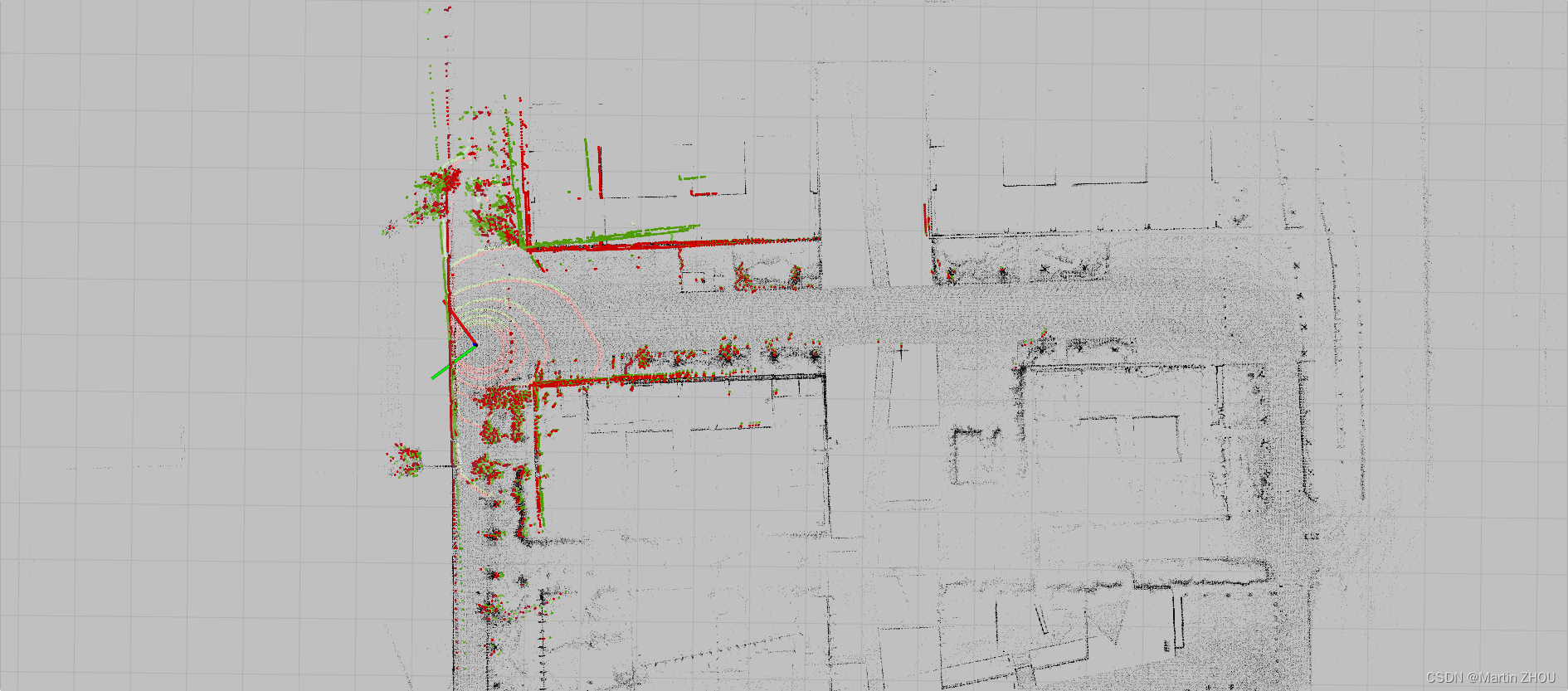
实际运行结果
红色为去除畸变后的点云,绿色为原始点云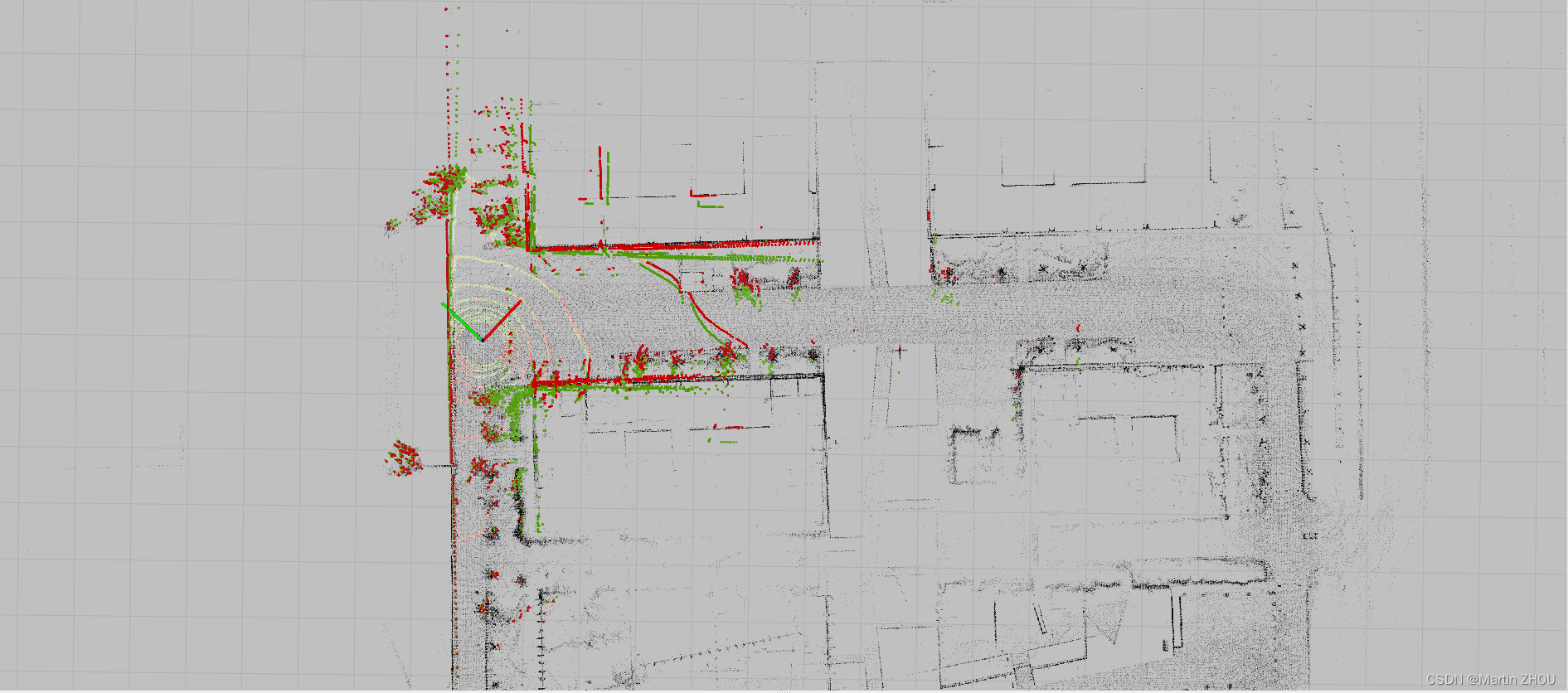
 代码库:
代码库:
https://gitee.com/zhou_jun1993/lidar_deskew















 613
613











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









