






如需转载请注明出处:https://blog.csdn.net/qq_29350001/article/details/81558649
上一篇文章讲了RTC,里面其实已经包含了时钟系统的介绍了。这篇文章将再详细的讲一下。
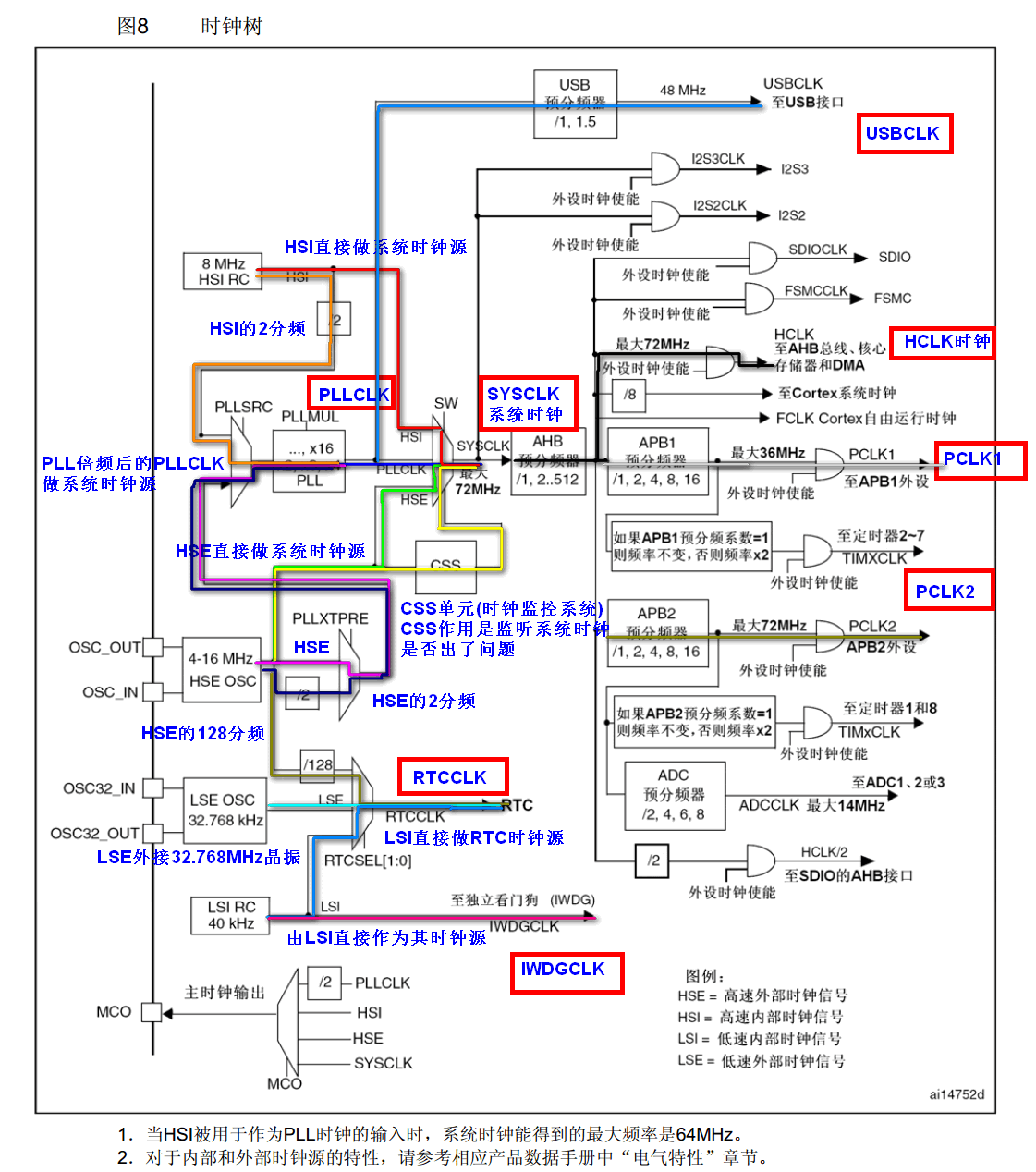
一、时钟系统框图
二、时钟系统
- STM32 有5个时钟源:HSI、HSE、LSI、LSE、PLL。
①、HSI是高速内部时钟,RC振荡器,频率为8MHz,精度不高。
②、HSE是高速外部时钟,可接石英/陶瓷谐振器,或者接外部时钟源,频率范围为4MHz~16MHz。
③、LSI是低速内部时钟,RC振荡器,频率为40kHz,提供低功耗时钟。
④、LSE是低速外部时钟,接频率为32.768kHz的石英晶体。
⑤、PLL为锁相环倍频输出,其时钟输入源可选择为HSI/2、HSE或者HSE/2。倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz。 - 系统时钟SYSCLK可来源于三个时钟源:
①、HSI振荡器时钟
②、HSE振荡器时钟
③、PLL时钟 - STM32可以选择一个时钟信号输出到MCO脚(PA8)上,可以选择为PLL输出的2分频、HSI、HSE、或者系统时钟。
- 任何一个外设在使用之前,必须首先使能其相应的时钟。
三、RCC相关配置寄存器
/**
* @brief Reset and Cl
 订阅专栏 解锁全文
订阅专栏 解锁全文
















 3682
3682











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











