







 本文详细介绍了ICP算法的两种改进版本:PLICP(点到线对应)和NICP(考虑法向量的点云配准)。PLICP通过匹配点与直线提高匹配精度,加速收敛速度,而NICP结合法向量信息,增强配准的稳健性和准确性。两者都在处理点云配准时提供了更优的解决方案。
本文详细介绍了ICP算法的两种改进版本:PLICP(点到线对应)和NICP(考虑法向量的点云配准)。PLICP通过匹配点与直线提高匹配精度,加速收敛速度,而NICP结合法向量信息,增强配准的稳健性和准确性。两者都在处理点云配准时提供了更优的解决方案。
点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

前言
在之前的文章中(ICP方法详细推导),我们介绍了ICP的基本思想与详细的推导。本文将介绍ICP方法的两种改进,分别是:PLICP[1]与NICP[2]。本文将分别介绍两种改进的基本思想,具体算法以及一些补充说明。若有理解不到位和错误之处,请以论文原文为准。
第一部分 PLICP
一、基本思想
PLICP中的“PL”表示”Point to Line”,顾名思义,在匹配时是一个点与一个直线进行匹配,而不是传统方法的点与点进行匹配。之所以有这种思想,是因为我们认为每次扫描的数据是对真实物理世界的一个平面的采样,所以我们在匹配时应该尽可能与这个直线去匹配而不是具体的采样点。
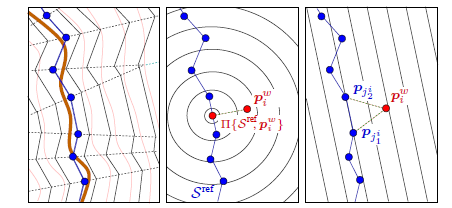
(左图棕色曲线表示真实的物理面,蓝色的为带有噪声的采样点;中间表示传统ICP的点点距离,右图表示PLICP方法,匹配时是计算到平面的距离)
二、 算法描述
2.1 利用上一次迭代的变化参数(或初值),对当前采样(curr)的每个点进行变化;
2.2 变换后&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4463
4463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









