







自动驾驶技术的进化:从SLAM+DL到BEV+Transformer 讲起~~
自动驾驶技术在20世纪初的概念和实验主要集中在车辆自动化和遥控方面。到了20世纪80年代和90年代,随着计算机技术和人工智能的发展,自动驾驶技术开始取得显著进展。这一时期,一些大学和研究机构开始开发原型车辆,能够在特定条件下实现自动驾驶。
进入21世纪,自动驾驶技术迎来了快速发展期。随着传感器、算法、计算能力和大数据技术的进步,多家科技公司和汽车制造商开始投入巨资研发自动驾驶车辆。
目前,自动驾驶技术正处于逐步成熟阶段,虽然还面临着技术、法律、伦理和安全等多方面的挑战,但其发展潜力仍然不可小觑,将对交通安全、效率、环境保护等产生深远影响。
这里梳理自动驾驶技术的进化与发展。
1. 自动驾驶的经典框架
如图1是自动驾驶的经典框架,其中,最为重要的任务是场景理解任务,这一任务在学术文章中常常称之为感知任务,伴随AI技术蓬勃发展,感知任务也在不断刷新其性能上限。为辅助车辆控制系统,以及理解周围环境,自动驾驶系统使用了各种感知技术,最为重要且广为人知的就是:SLAM(同步定位与建图)和BEV(鸟瞰视图)技术。这些技术赋予车辆无论在静止还是移动的状态下,理解自身位置、检测周围障碍物、以及估计障碍物方向和距离的能力,这些能力为后续驾驶决策提供信息。
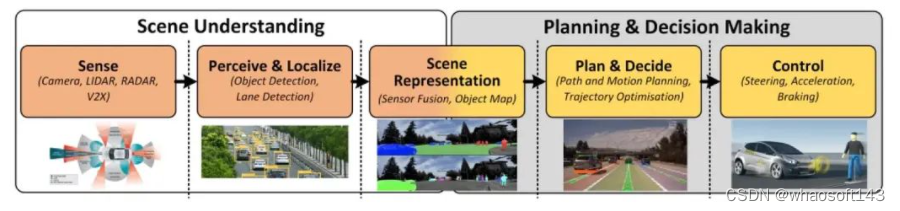
图1|经典的自动驾驶框架
2. SLAM+DL 第一代自动驾驶感知技术
2.1 简介
开门见山,第一代自动驾驶感知技术,是以SLAM算法结合深度学习技术相结合为代表的。第一代自动驾驶感知技术框架中的多种任务,例如:目标检测和语义分割任务,都必须和输入数据处于相同坐标系统下实施。如下图2所示,唯一例外的是相机感知任务,它是在2D图像的透视空间中运行的。但是,为了从2D空间升级到3D空间,2D检测任务需要很多关于传感器融合的手动规则,例如使用雷达或者激光雷达等传感器进行3D测量。因此,传统感知系统通常需要在与车载摄像机图像相同的空间内进行处理。为了将2D空间中的位置信息更新到3D空间,后续的预测和规划任务常常用于多传感器融合,如借助毫米波雷达或激光雷达等有源传感器。
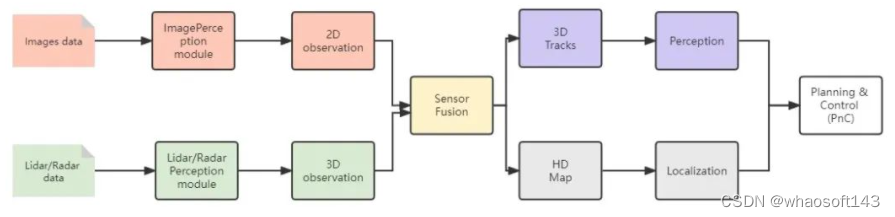
图2 SLAM+DL的自动驾驶技术框架
■2.2问题和挑战
但是,上述基于SLAM+DL的第一代自动驾驶技术暴露出越来越多的问题:
1)整个自动驾驶系统最上游的是感知模块,尤其当传感器的类型和数量变的越来越复杂,如何融合持续输入的多模态和不同视图数据,并实时输出下游所需的一系列任务结果,成为自动驾驶的核心挑战。
2)感知环节通常会消耗车辆的大部分算力。在感知过程中,系统需要融合不同视角摄像头的视觉数据以及毫米波雷达、激光雷达等传感器的数据,这给模型设计和工程实现带来了挑战。在传统的融合后处理方法中,每个传感器对应一个神经网络,无法充分发挥多传感器融合的优势,而且计算量大、耗时长。此外,如果多个任务简单地共享一个骨干网络,很容易导致每个任务难以同时获得优异的性能,如图3所示。
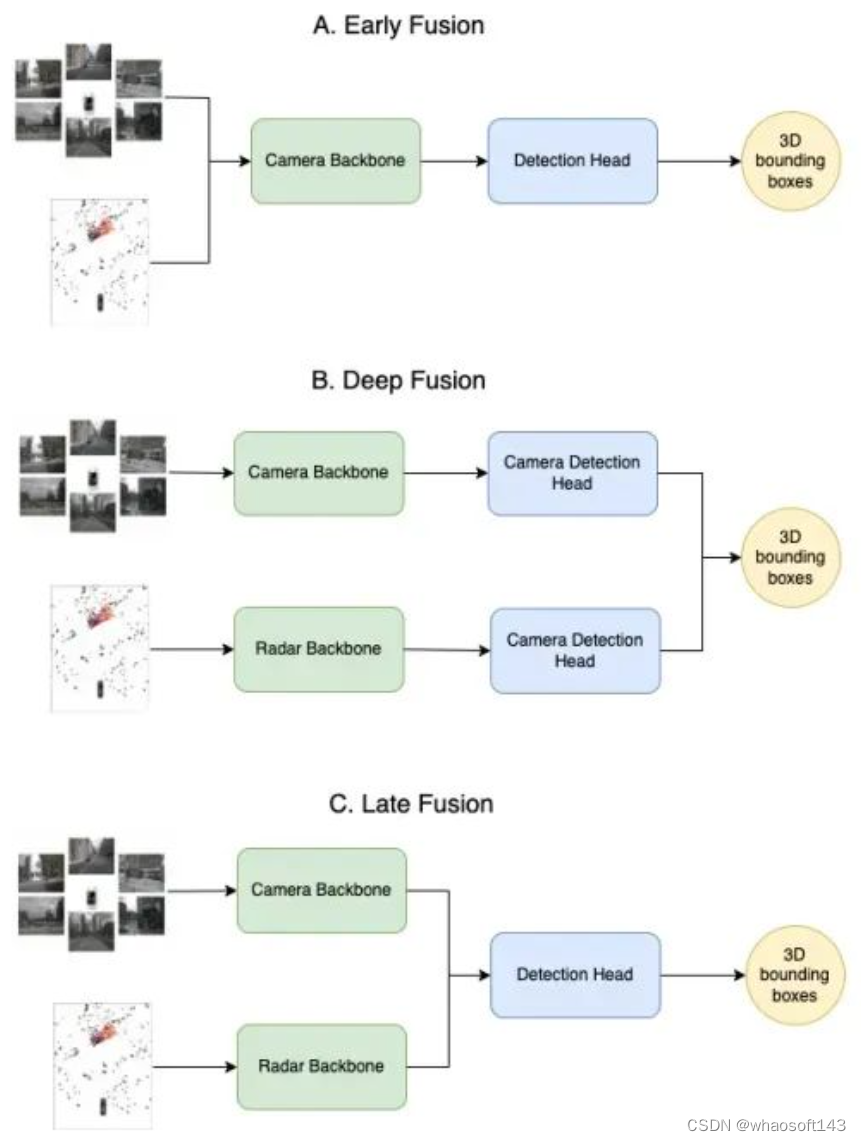
图3|一种多模态融合算法示意图
3. BEV+Transformer 第二代自动驾驶感知技术
3.1 BEV方案基本流程
·简介
BEV(鸟瞰视图)模型基于多个摄像头甚至不同传感器,可以被视为解决上述SLAM+DL第一代自动驾驶技术问题的潜在技术方案
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1269
1269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









