






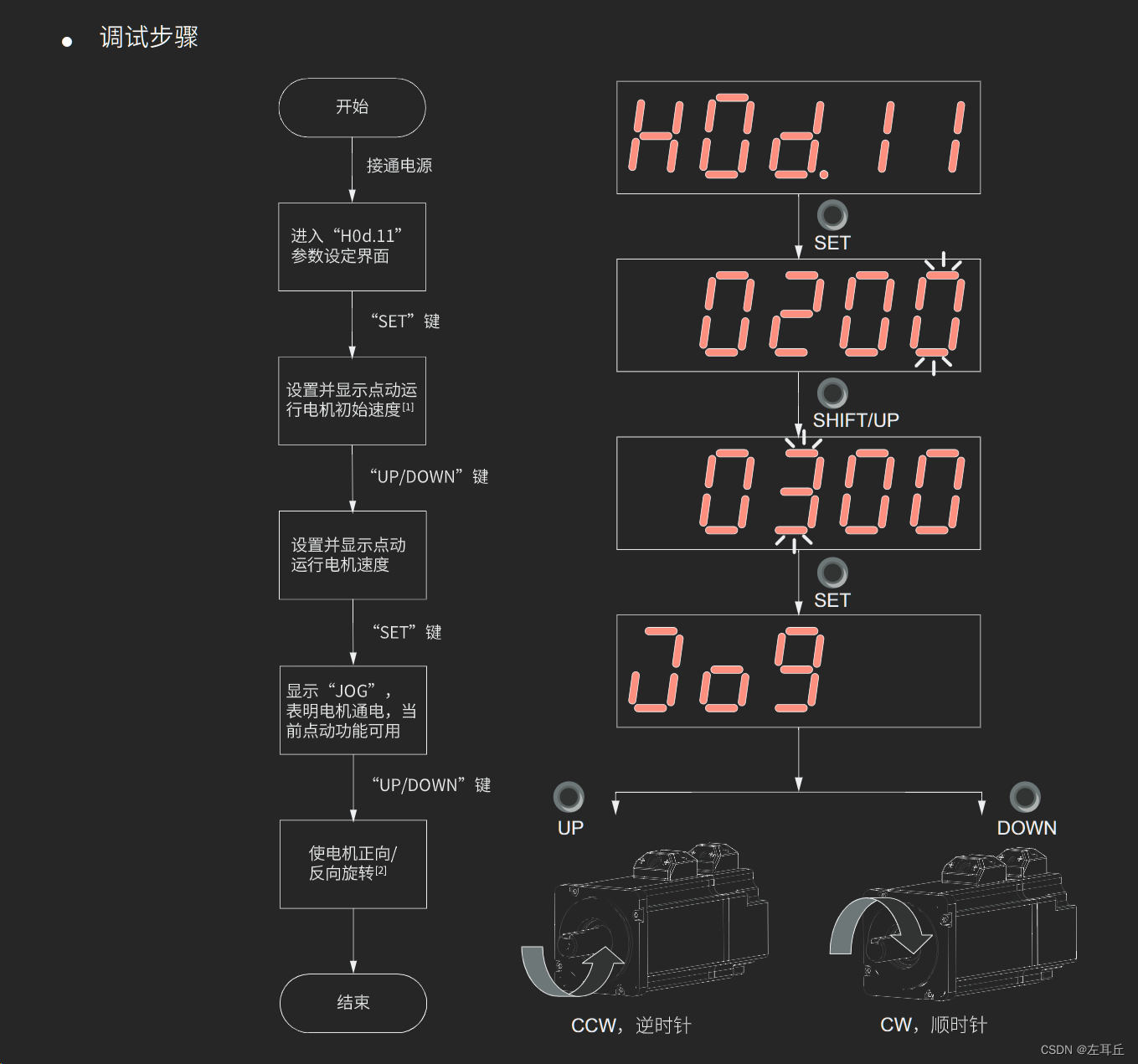
1.通过面板点动测试伺服电机
2.端子定义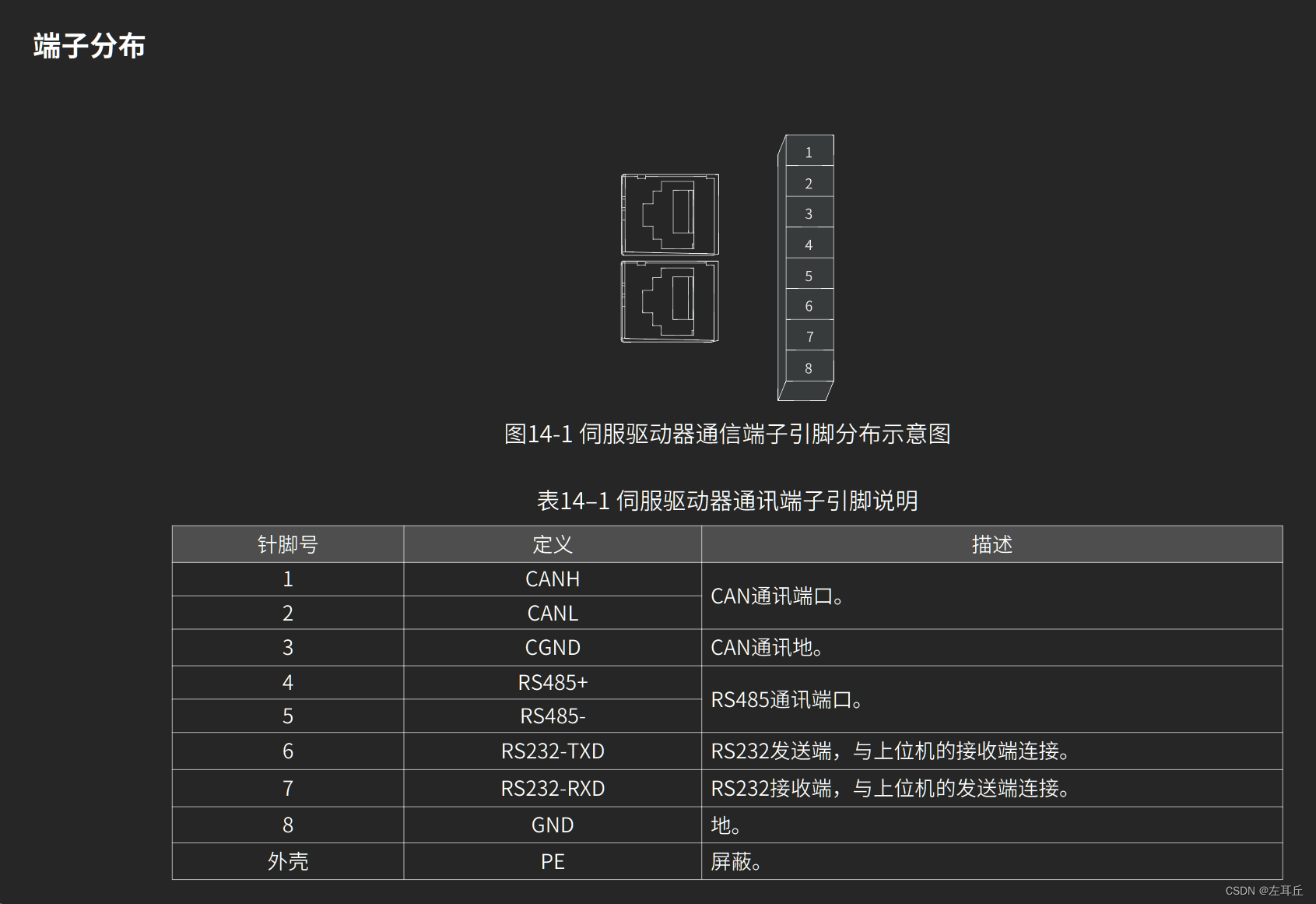
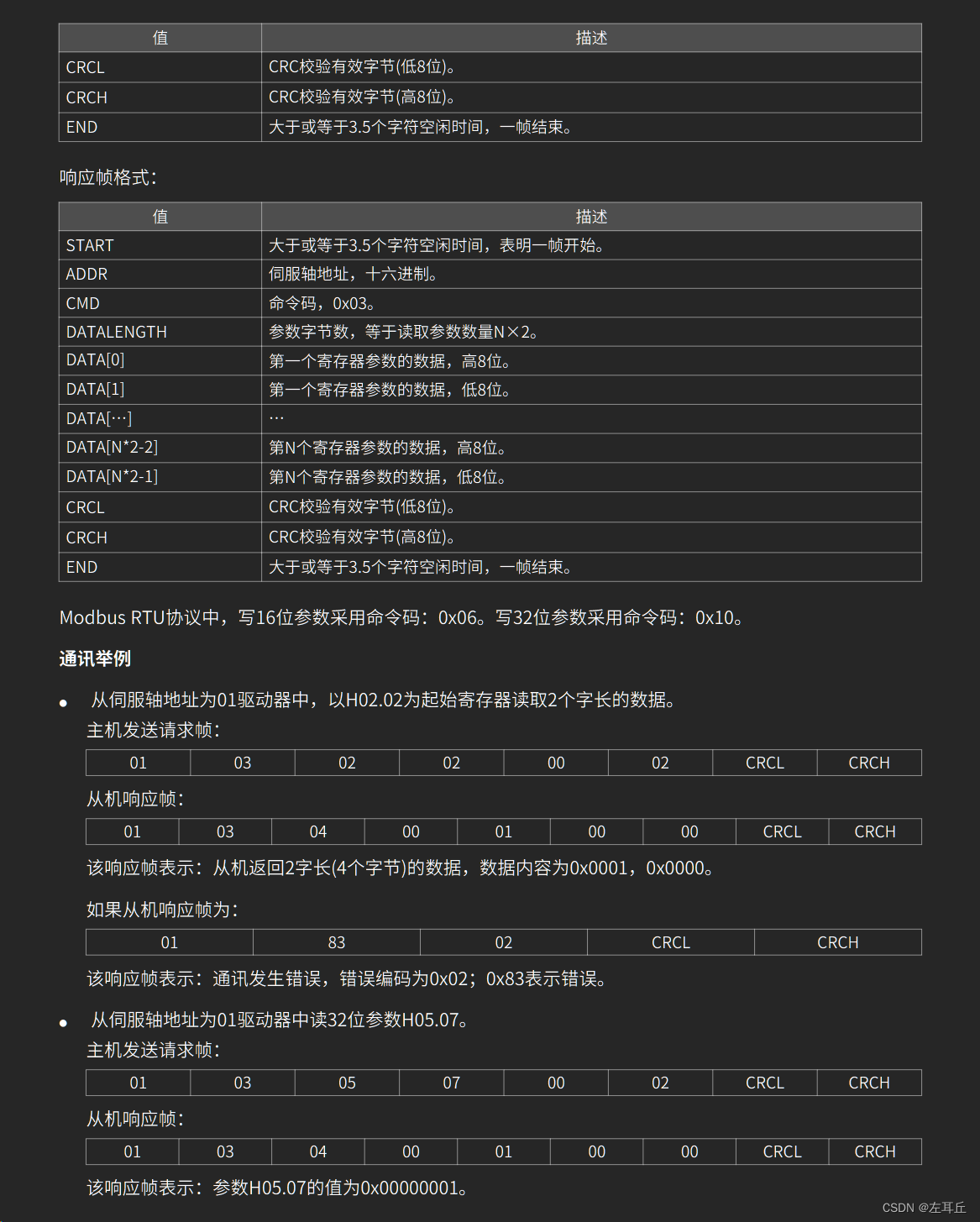
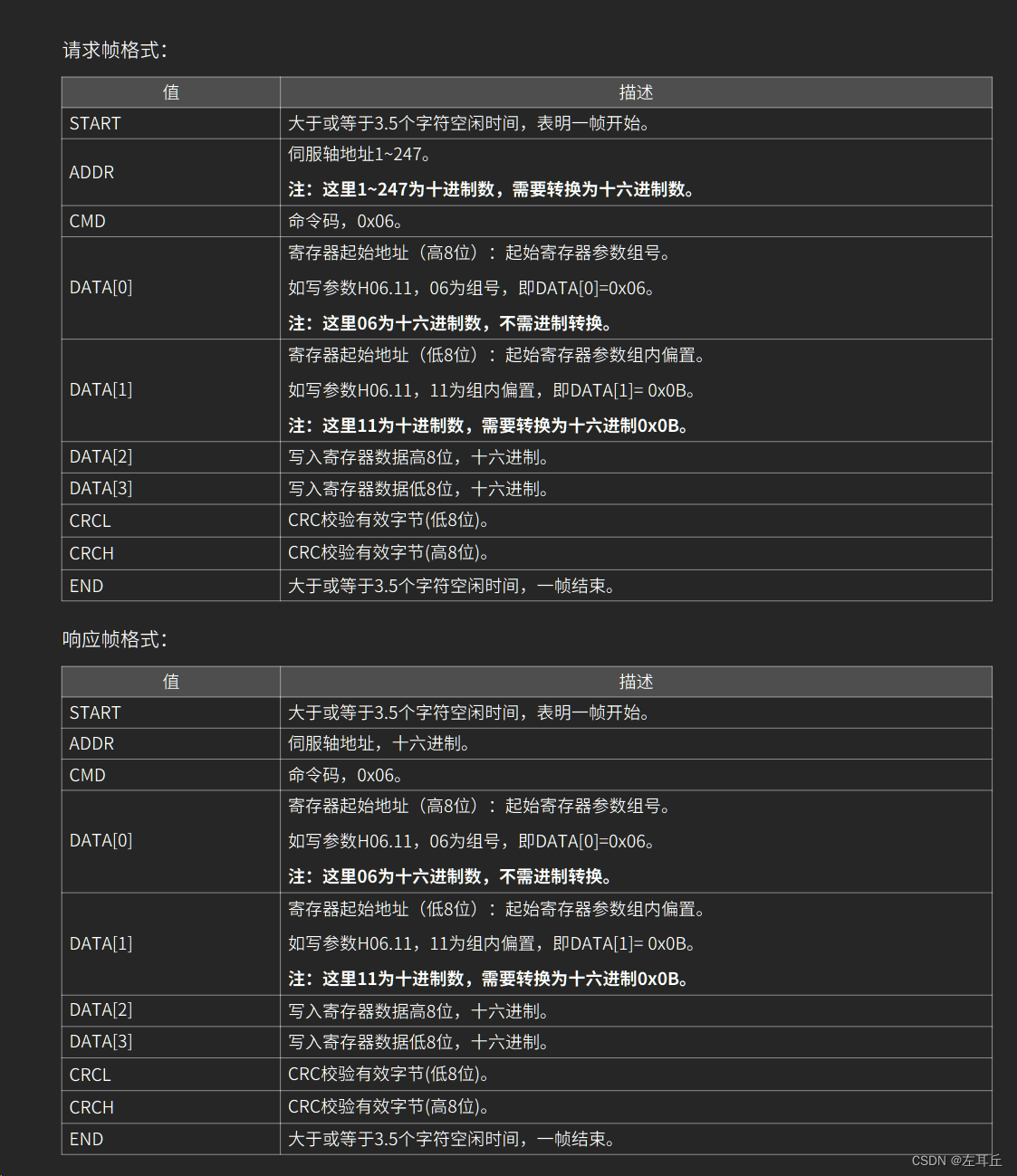
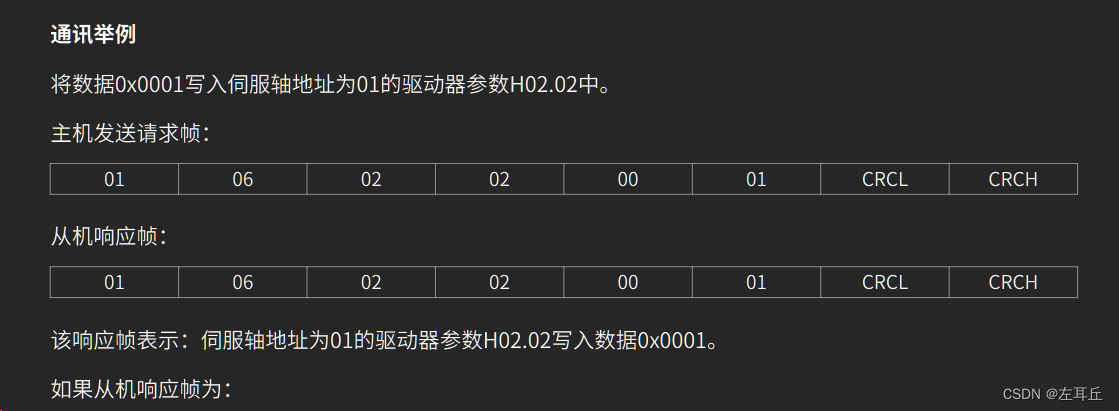
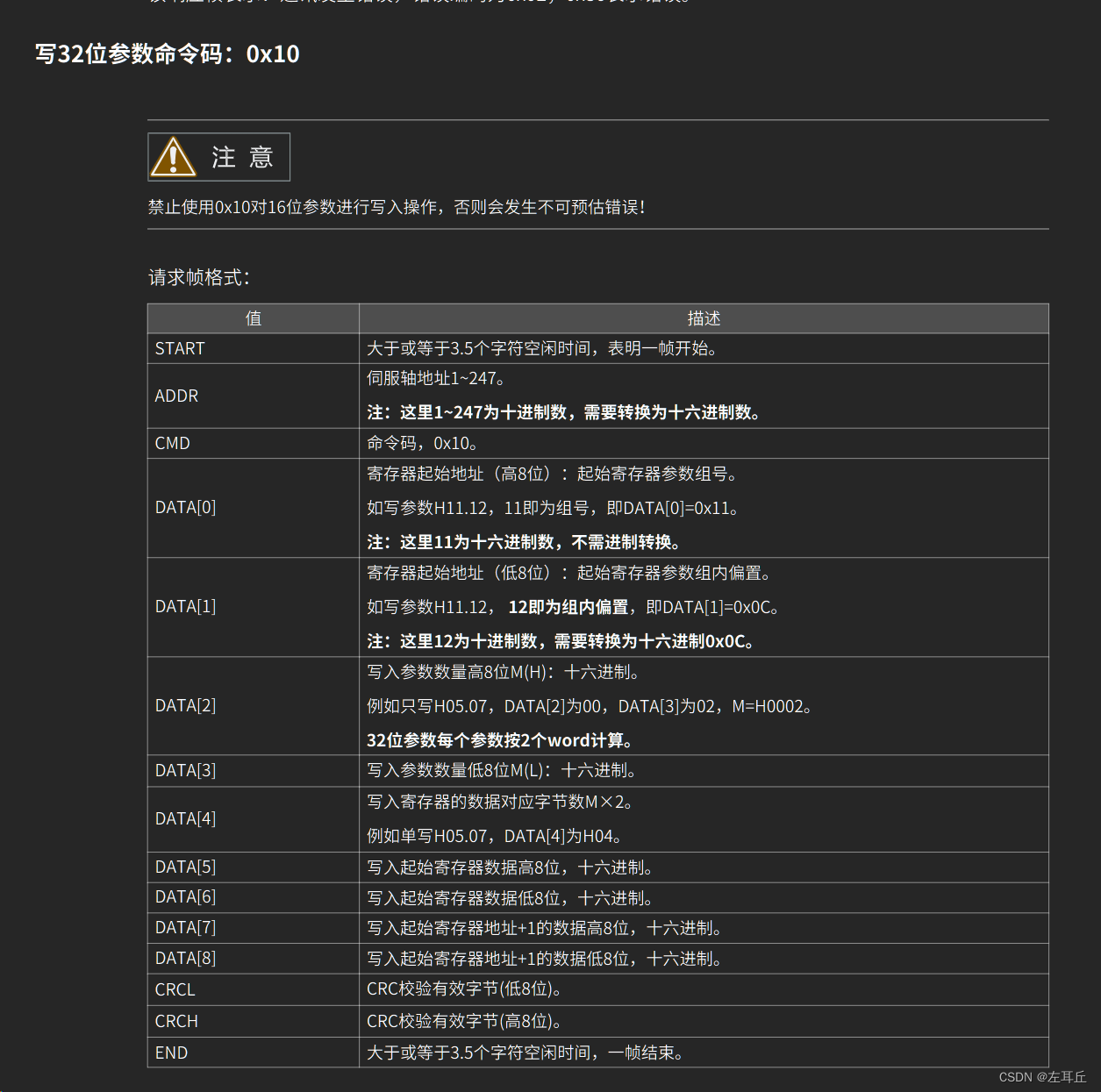
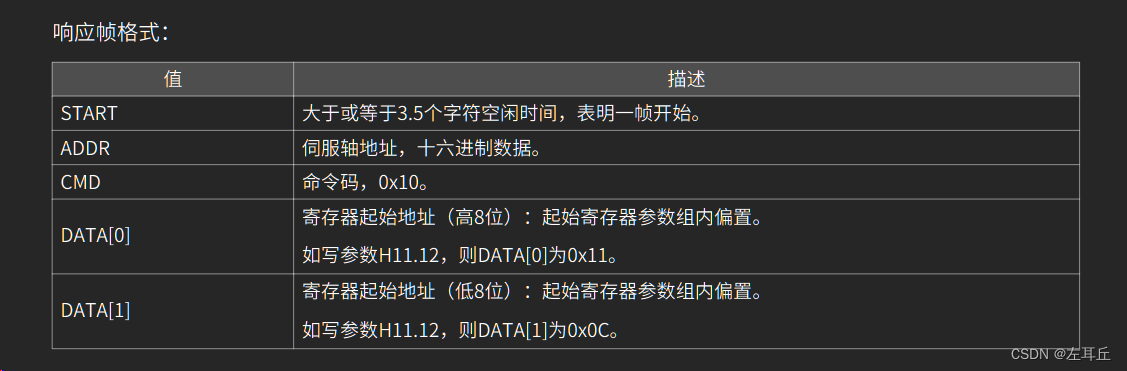
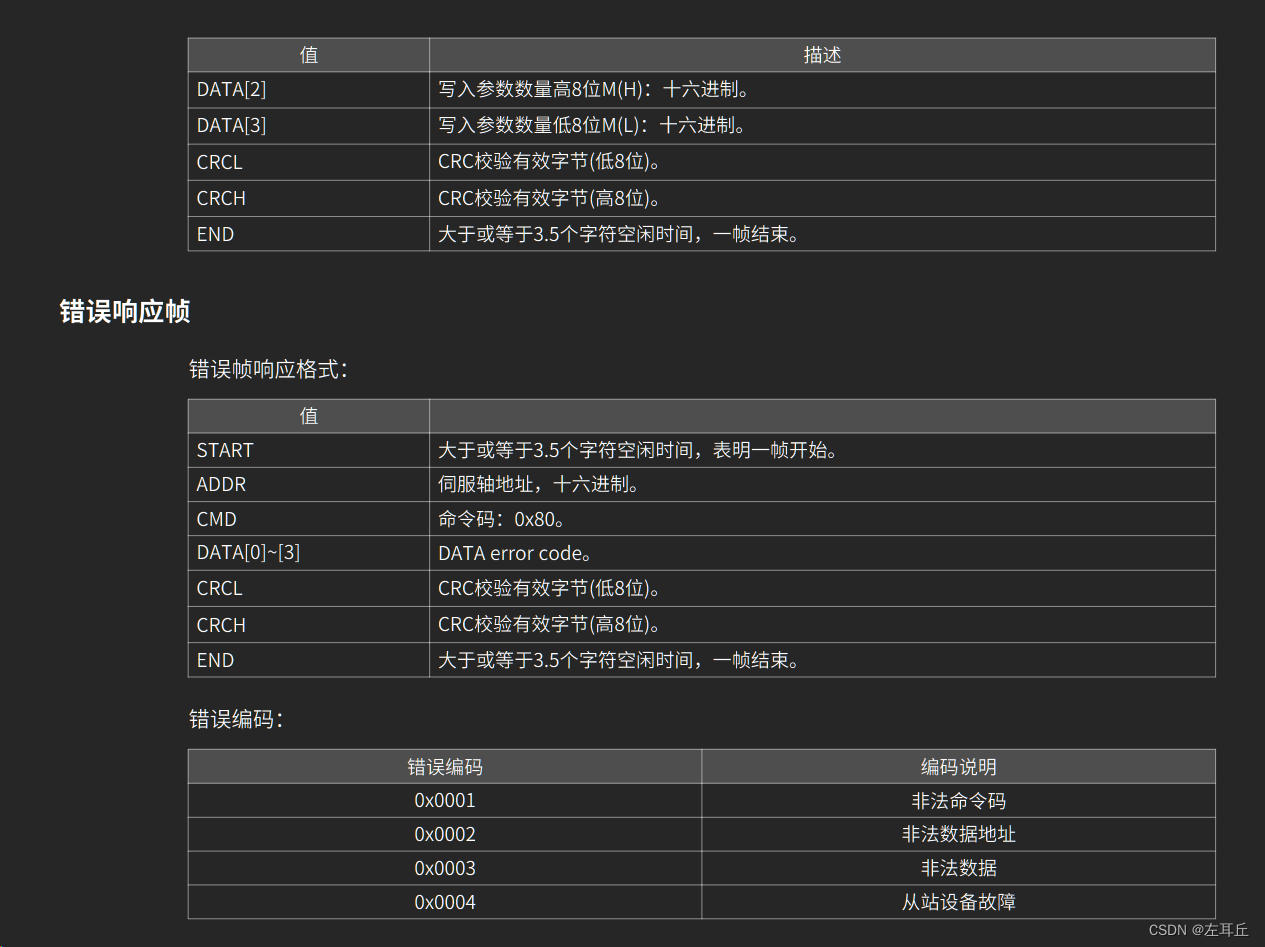
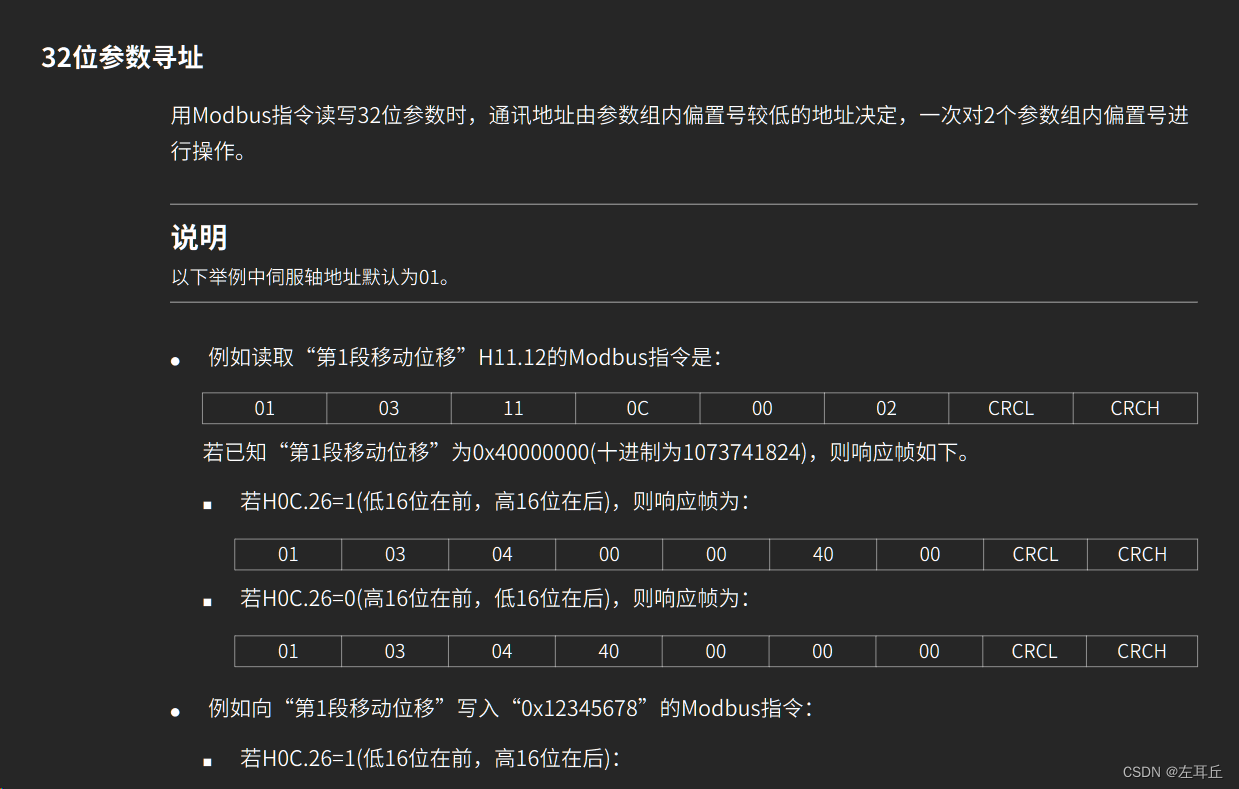
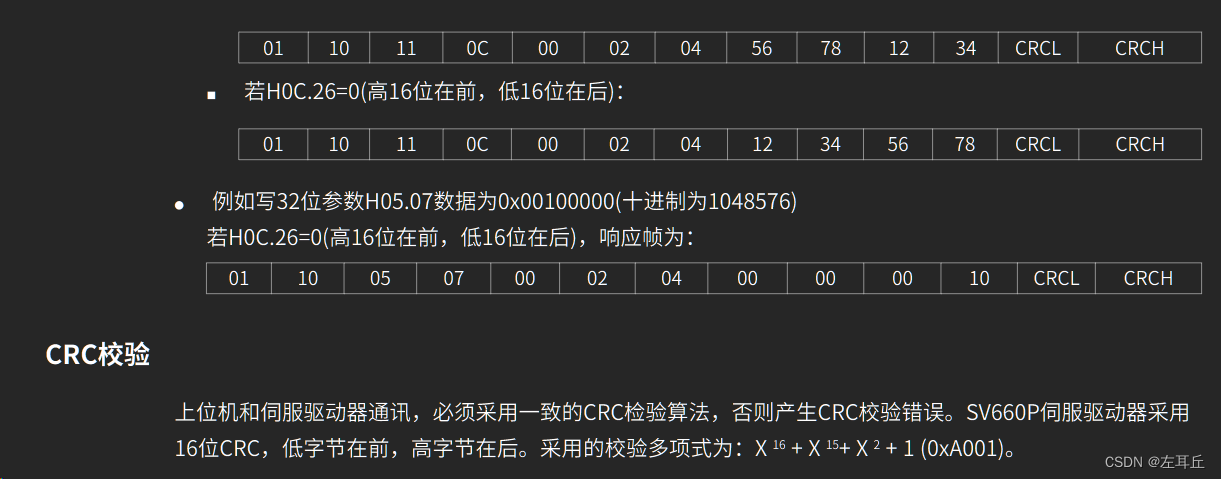
3.通信数据帧结构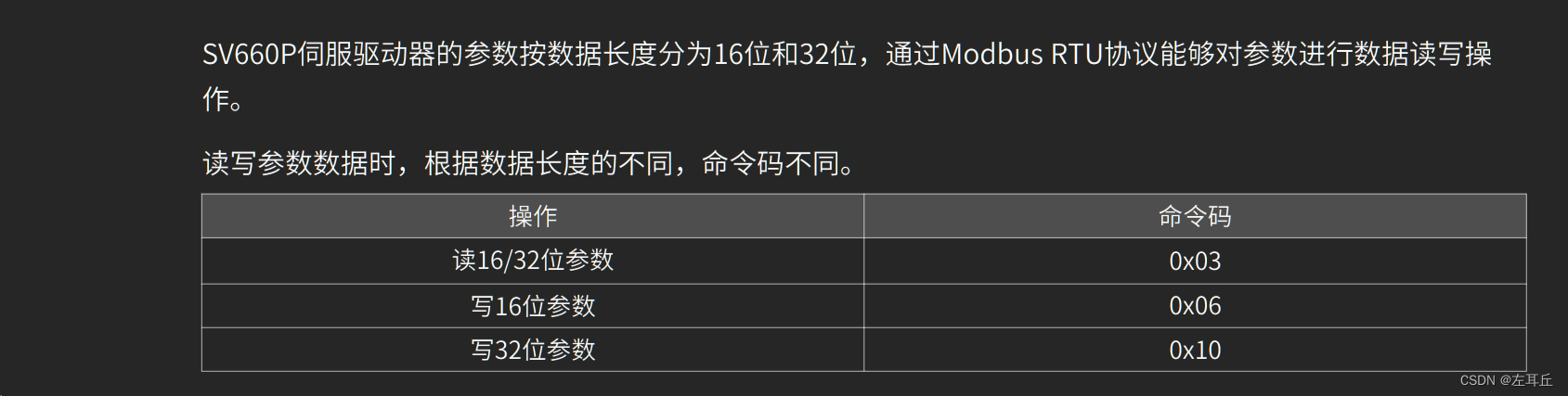



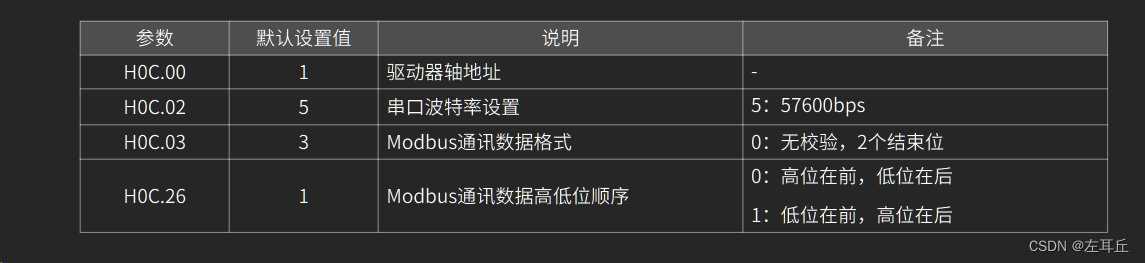
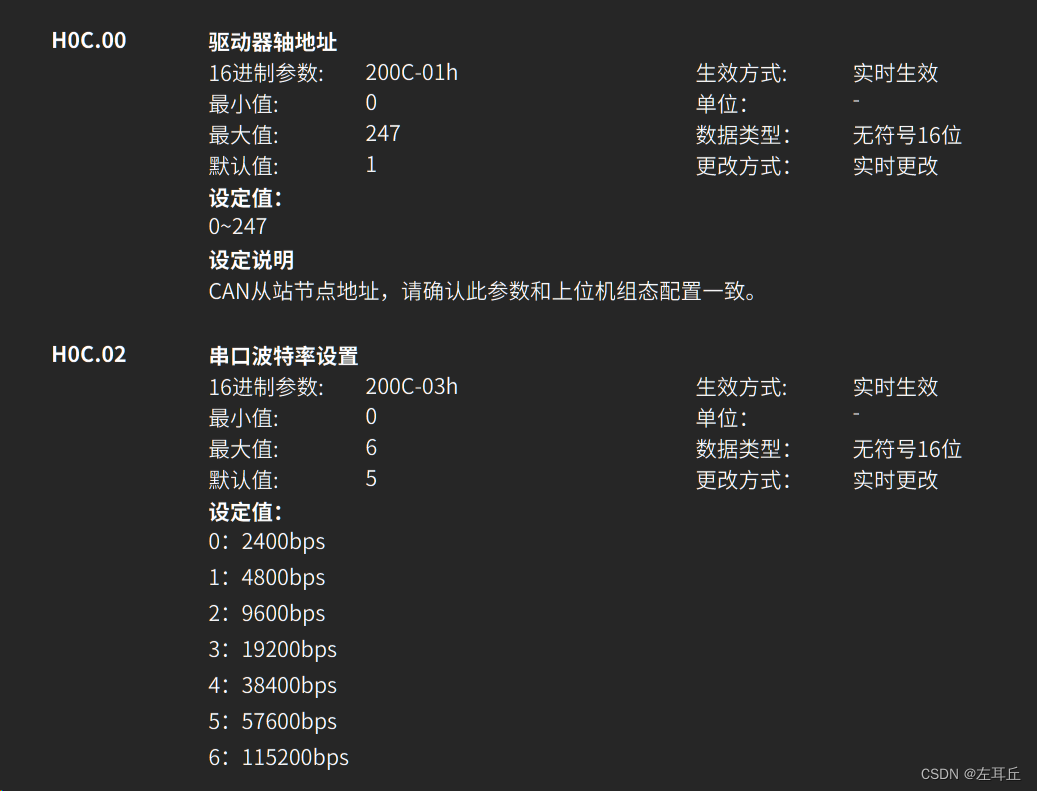
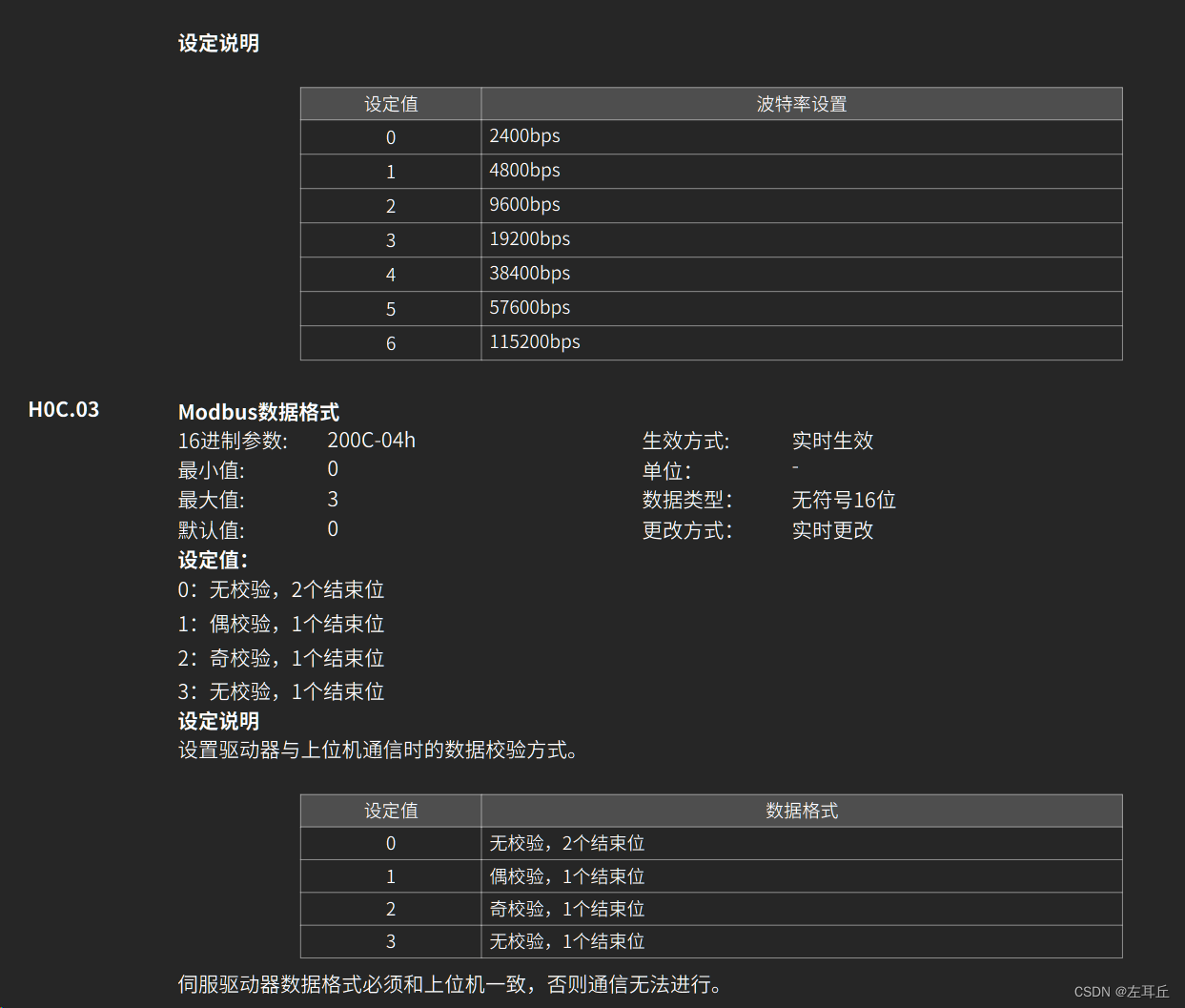
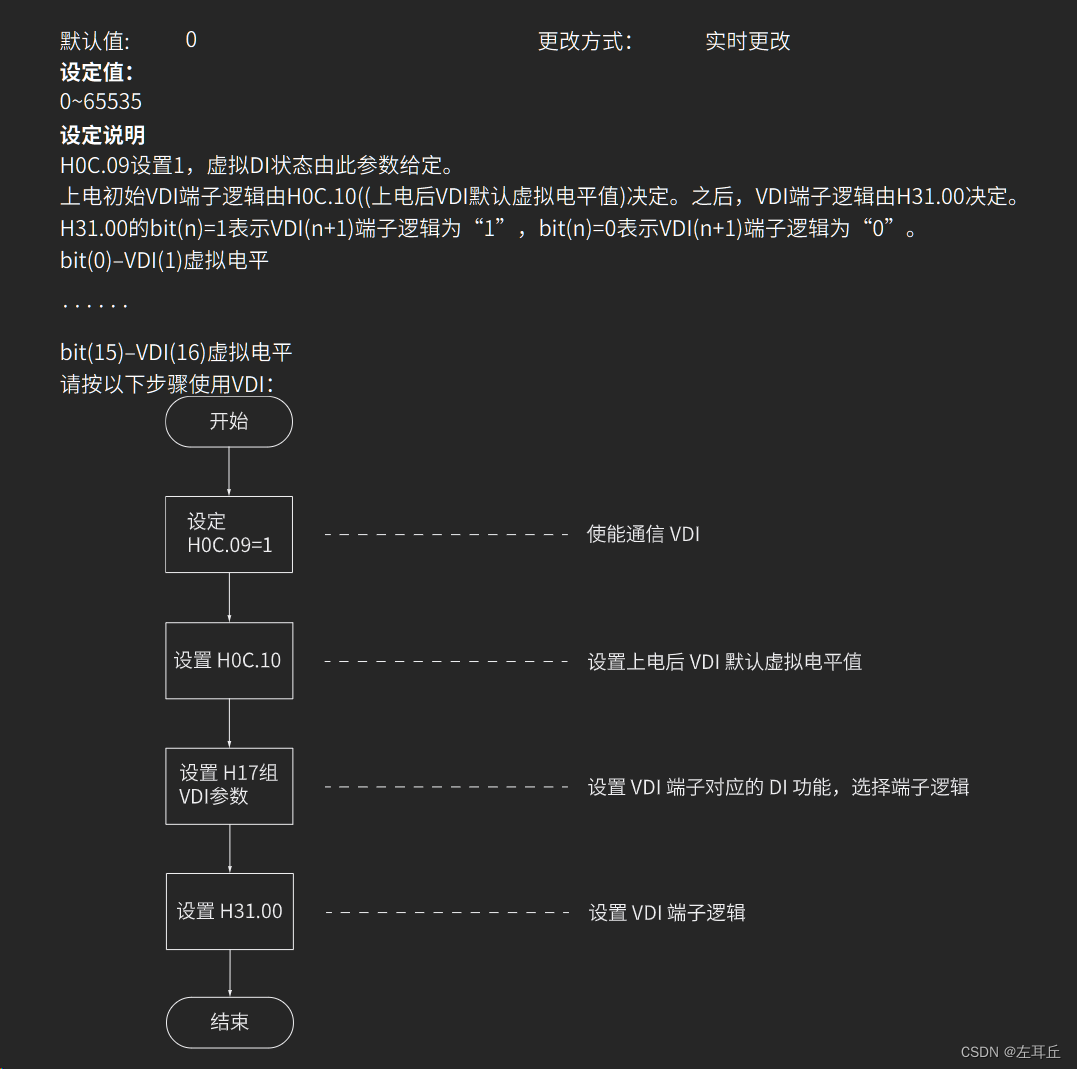
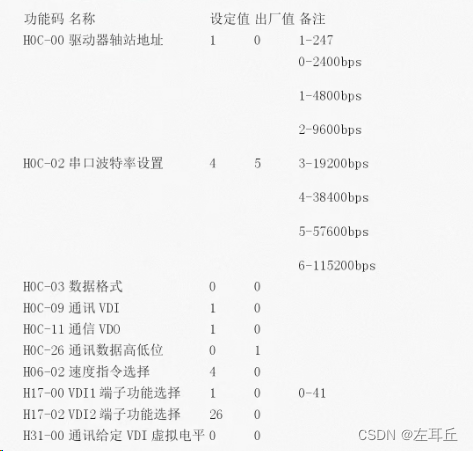
4.通信相关参数
5.
 本文介绍了如何通过面板点动测试伺服电机,详细阐述了端子的定义以及通信过程中的数据帧结构和相关参数设置,为技术人员提供了伺服电机控制的基础知识。
本文介绍了如何通过面板点动测试伺服电机,详细阐述了端子的定义以及通信过程中的数据帧结构和相关参数设置,为技术人员提供了伺服电机控制的基础知识。
1.通过面板点动测试伺服电机
2.端子定义
3.通信数据帧结构
4.通信相关参数
5.
 2821
5085
2821
5085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























