







 位姿包括物体的(x,y,z)位置和(α,β,γ)旋转角度,具有6个自由度。图像坐标系用(u,v)表示像素位置,但不包含物理单位,实际图像坐标系需以物理单位建立。摄像机坐标系相对于世界坐标系通过旋转矩阵R和平移向量t转换。针孔成像模型描述了空间点P在像平面的投影点p的计算方式。"
109283355,4238109,ISO-CANFD与非ISO-CANFD报文差异解析,"['CAN总线', '通信协议', '嵌入式硬件', '汽车电子', '数据采集']
位姿包括物体的(x,y,z)位置和(α,β,γ)旋转角度,具有6个自由度。图像坐标系用(u,v)表示像素位置,但不包含物理单位,实际图像坐标系需以物理单位建立。摄像机坐标系相对于世界坐标系通过旋转矩阵R和平移向量t转换。针孔成像模型描述了空间点P在像平面的投影点p的计算方式。"
109283355,4238109,ISO-CANFD与非ISO-CANFD报文差异解析,"['CAN总线', '通信协议', '嵌入式硬件', '汽车电子', '数据采集']
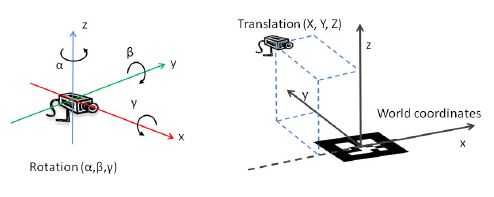
位姿
位姿是指一个物体的位置和方向(The pose of an object refers to its location and orientation)。
一个物体的位置可以用 (x,y,z) 来表示。而方向可以用 (α,β,γ) 来表示,它们是表示围绕三个坐标轴旋转的角度。所以一个位姿有6个自由度,如下图所示:
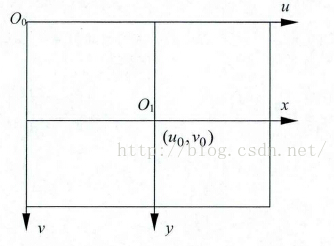
图像坐标系
首先,介绍图像坐标系。
每幅数字图像在计算机内为 M∗N 数组, M 行
{
u=XdX+u0v=YdY+v0
用齐次坐标将上式表示为:
⎡⎣⎢uv1⎤⎦⎥=⎡⎣⎢⎢⎢⎢⎢1dX0001dY0u0v01⎤⎦⎥⎥⎥⎥⎥
摄像机坐标系和世界坐标系
由于摄像机可安放在任意位置,在环境中选择一个基准坐标来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系。摄像机坐标系和世界坐标系之间的关系可以用旋转矩阵 R 与平移向量
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4340
4340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









