







对于图像坐标系,相机坐标系和世界坐标系的学习和自己的一些理解,如果有错误欢迎指正和讨论。
图像坐标系
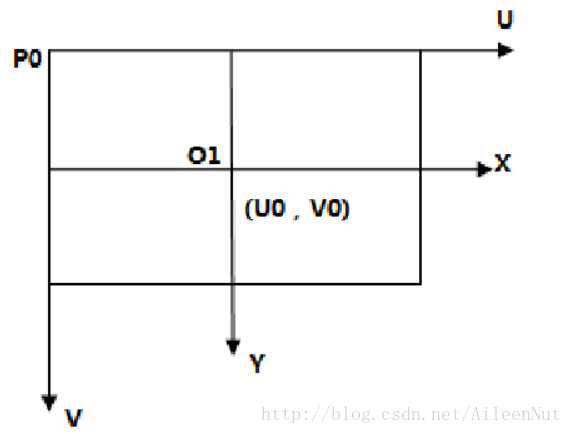
1.图像像素坐标系
原点:图像左上角P0点
单位:像素
横坐标u:图像数组中的列数
纵坐标v:图像数组中的行数
2.图像物理坐标系
在图像像素坐标系下建立以物理单位(以下均假设为mm)表示的坐标系,使像素尺度具有物理意义。
原点:主点(相机光轴与图像平面的交点,一般位于图像平面中心,即图中O1点)
单位:mm/像素
横轴x轴:与像素坐标系下的u轴平行
纵轴y轴:与像素坐标系下的v轴平行
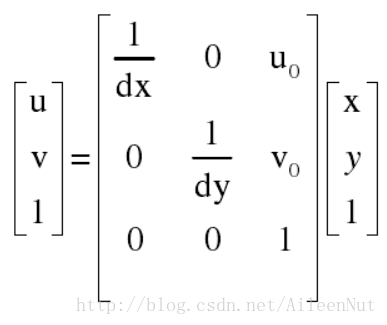
3.图像像素坐标系与图像物理坐标系的转换关系:

其中:
dx为每个像素在横轴x上的尺寸,dy为每个像素在纵轴y上的尺寸。
将其写成矩阵形式:
相机坐标系
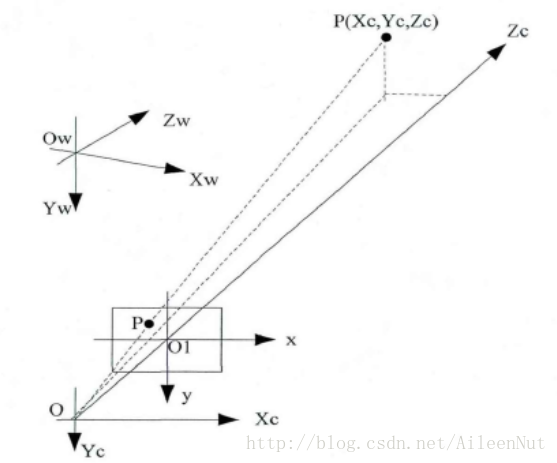
图中:xy平面为图像平面
原点:摄像机光心O点
Xc轴:与图像坐标系x轴平行
Yc轴:与图像坐标系y轴平行
Zc轴:摄像机光轴,与图像平面垂直
OO1=f(焦距)
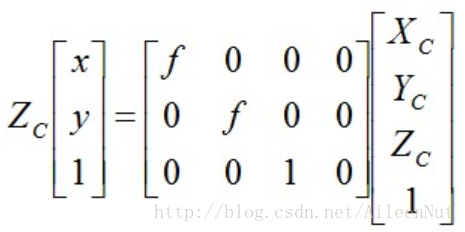
图像物理坐标系和相机坐标系的转换关系:
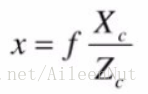
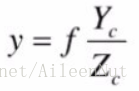
将其写成矩阵形式:
世界坐标系
世界坐标系用来描述相机的位置,即相机坐标系原理图中的Ow-XwYwZw坐标系。
相机坐标系与世界坐标系的转换关系:
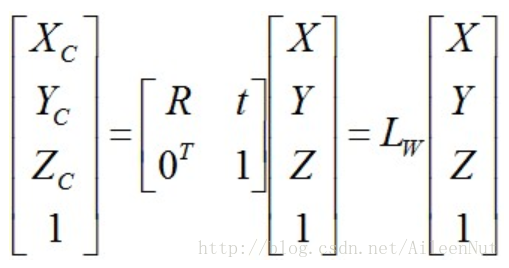
其中:
R为旋转矩阵,是x,y,z三个轴向旋转矩阵的乘积,即R=Rx*Ry*Rz。
T为平移向量,表示三个轴向上的平移距离,即T=[Tx,Ty,Tz]T(上标表转置)。
Lw为由旋转平移构成的一个4*4的矩阵。
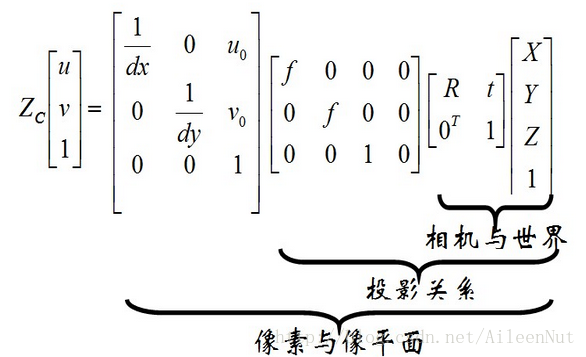
由上述对三个坐标系之间的转换可以推导得到图像像素坐标系和世界坐标系的转换关系:















 824
824

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









