






 本文深入介绍了最小均方(LMS)算法及其在机器学习中的应用。包括LMS算法的基本原理、几种优化方法,如最速下降法、牛顿法、高斯-牛顿法等,并详细解释了它们的工作机制及优缺点。
本文深入介绍了最小均方(LMS)算法及其在机器学习中的应用。包括LMS算法的基本原理、几种优化方法,如最速下降法、牛顿法、高斯-牛顿法等,并详细解释了它们的工作机制及优缺点。
这里是《神经网络与机器学习》第三章的笔记…
最小均方算法,即Least-Mean-Square,LMS。其提出受到感知机的启发,用的跟感知机一样的线性组合器。
在意义上一方面LMS曾被用在了滤波器上,另一方面对于LMS的各种最优化方式为反向传播算法提供了思想基础。
于是这章书主要是简单介绍LMS算法的原理,并介绍几个简单的最优化方法,然后用物理热力学原理描述LMS算法的学习过程(这个部分太过高深只好跳过)
LMS滤波结构
原理上跟感知机也差不多,也是对包含一组共
M
个元素的
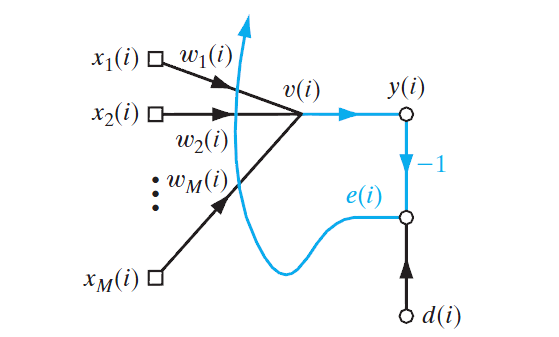
这里比感知机还要简单的,直接将局部诱导域
或者写成向量的形式:
w(i) 即权值向量 [w1(i),w2(i),...,wM(i)]T , i 表示迭代次数。
误差信号为期望响应跟输出的差,即:
无约束最优化问题
LMS算法的目标就是找到一组权值向量,使其输出响应跟期望响应最接近。
设立一个代价函数
E(w)
,其对权值向量连续可微,用来描述输出响应跟期望响应的差距,也就是值越小越好。于是我们的目标就是酱紫:
找到一个最优的权值向量
w∗
,对于任何
w
都有:
这是一个无约束最优化问题。其解决的一个必要条件就是 ∇E(w)=0 。
也就是:
一般的解决方法是从一个初始权值向量 w(0) 开始,不断迭代产生新的权值向量 w(i) ,对于每一个权值向量其代价函数都要小于上一个的代价函数,即 E(w(i))<E(w(i−1)) ,如此往复直到代价函数足够小为止。或者说在一个M维的空间里,从一个点出发,不停地往代价函数减小的方向走,直到走到最低点。
最速下降法
也就是反向传播算法梯度下降的基本原理,在每一个位置
w(i)
求出当前位置的代价函数的梯度
g(i)
,再沿着梯度的反方向(正方向使代价函数增加)移动一段距离成为
w(i+1)
,也就是每次都顺着坡最陡的方向往下走一步。
梯度即为代价函数对权值向量的每一个元素求偏导:
权值向量的修正为:
η 为一个标量,称为步长或学习率参数,可以理解为沿着梯度方向走的一步的大小。
理论上来说学习率参数 η 在足够小的时候,才能完全保证权值向量的修正是让代价函数一步比一步小的。但是 η 太小又会导致收敛速度过慢。
定义代价函数:
那么就有:
其中 ei=di−wTxi 即误差值。于是权值向量的修正为:
N为样本数量。
在R代码实现里依然使用感知机的双月牙二分数据集…这回月牙间距设为-2:
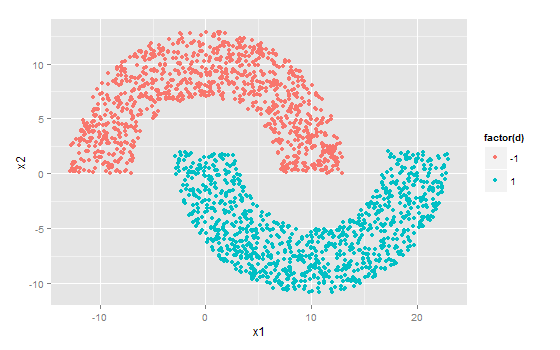
在R代码中该点集为X,共有2000个点被分到两个月牙上:
> X
x1 x2
[1,] 5.394098 11.3201659
[2,] -6.590109 4.3553063
[3,] 7.481122 4.3304918
[4,] -5.727646 8.1037834
[5,] -5.526536 6.9770548
[6,] 1.440511 1.5264444
[7,] 14.089176 -7.2411777
[8,] 3.846768 -1.9579111
[9,] 6.874768 -4.6271839
[10,] -10.922336 2.9085794
...R中%*%为矩阵相乘符号,t()为矩阵转置。
# X为点的坐标数据集,d为各点的正确分类,即期望响应,值为-1和1。
W = c(0,0) #初始化权值向量
eta = 1e-6 #学习率参数
n = 50 #迭代次数
MSE = c() #初始化均方差数组
for(i in 1:n){
y = X %*% W
e = d - y #计算分类误差
MSE[i] = mean(e**2) #记录每一步的均方差
W = W + eta * t(X) %*% e # 修正权值
}
plot(MSE,type='l',xlab='iteration') #绘制均方差变化曲线
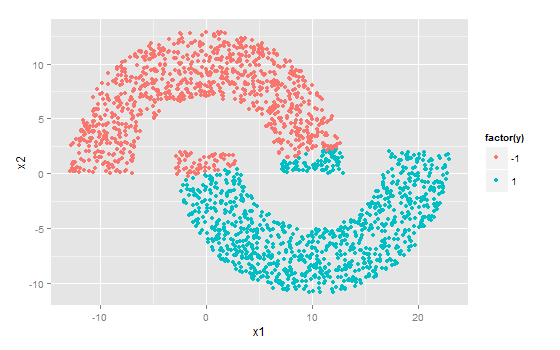
y = sign(X %*% W)
qplot(x1,x2,color=factor(y)) #绘制分类结果分类结果是酱紫的。毕竟本来就是线性不可分的点集。
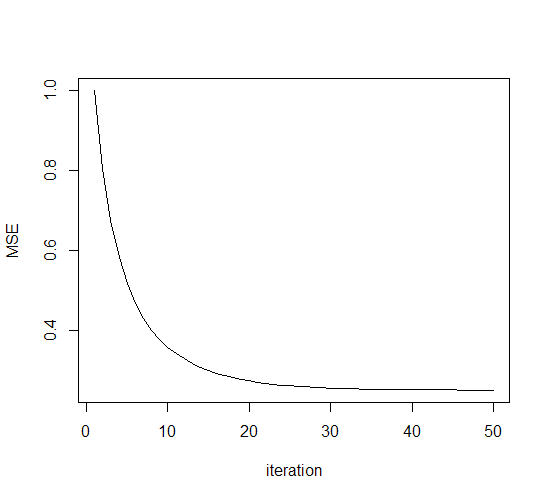
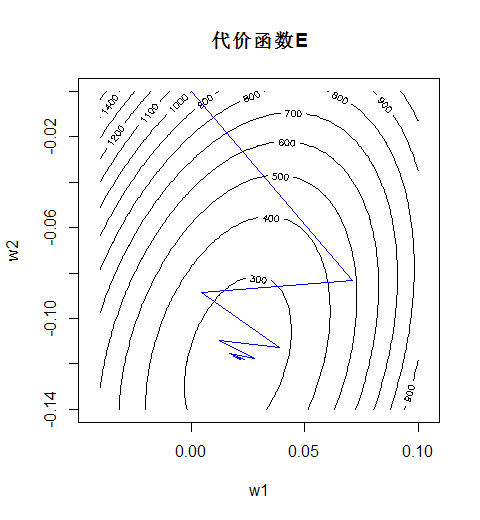
这里的学习率参数设为了一个较小的值1e-6。可见此时权值向量修正的轨迹是很平滑的:
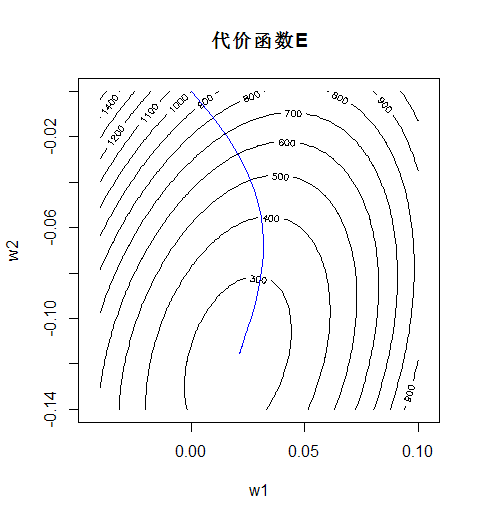
然而收敛的速度就不太尽人意了。
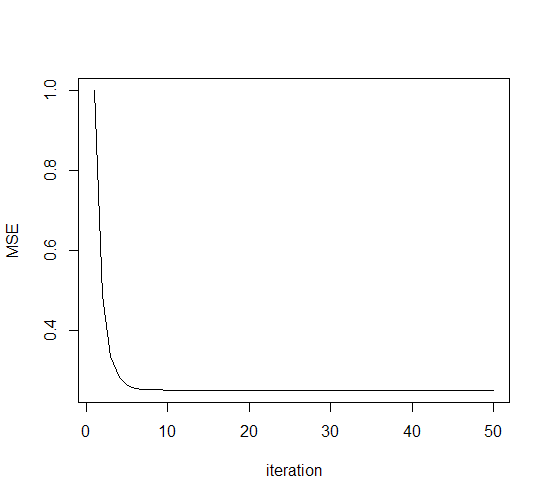
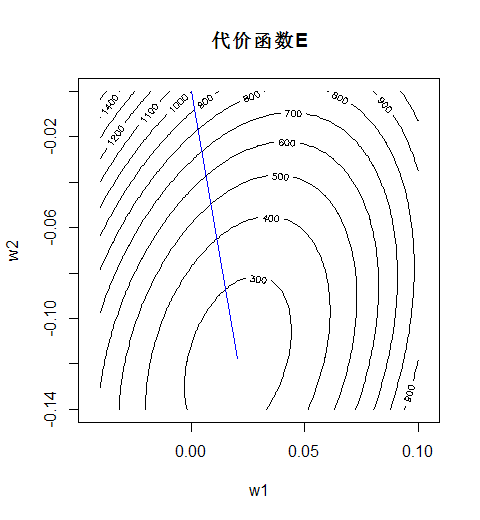
接下来将学习率参数
η
改为一个较大的值7.5e-6:
可见权值向量的轨迹从平滑变成了抖动。
而相对的,收敛速度快了…
牛顿法
最速下降法也可以理解为是拿一个平面去拟合点附近的曲面,而牛顿法则是复杂一些,拿一个二阶的曲面去拟合点附近的曲面。
具体来说就是拿代价函数在权值向量
w(i)
处二阶泰勒展开(最速下降法可认为是一阶泰勒展开):
其中 H 为Hessian矩阵:
说白了就是对不同组合的权值求两次偏导。
接着就是要最大化 ΔE(w) ,所以拿上上式右边对权值向量求导后再使之为0:
解得 Δw=−H−1(i)g(i) 。
也就是 w(i+1)=w(i)−H−1(i)g(i) 。
牛顿法的主要问题就是计算复杂度,以及其要求Hessian矩阵 H 每次迭代里都必须是正定的但这不好保证。
对于代价函数是这样的情况:
拿代价函数对权值求两次偏导,可以算得Hessian矩阵 H 的第i行第j列的元素为:
其中N为样本数量,s表示第s个样本。
因而Hessian就为:
其中 X 为样本矩阵,一行一样本一列一属性。
那么训练的R脚本就是酱紫:
H = t(X) %*% X #计算Hessian矩阵
W = c(0,0) #初始化权值向量
n=50
for(i in 1:n){
y = X %*% W
e = d - y
g = - t(X) %*% e
W = W - solve(H) %*% g #按照公式修正权值
}R中函数solve()可以求解矩阵的逆。
结果发现一次迭代就直接走到了最优值。
高斯-牛顿法
为了降低牛顿法的计算量同时保证收敛能力又提出了高斯-牛顿法。其优势就是不需要搞两次偏导。
依然是用这个误差平方和一半的代价函数:
不过这次就不先拿代价函数,而是拿误差信号 ei 对权值向量在某一点处作一阶泰勒展开:
这回i表示第i个样本,而n表示第n次迭代。
把所有样本的 e′i 组合成列阵形式,就有:
其中
e′=[e′1,e′2,...,e′N]T
,N为样本数量。
J
为Jacobi矩阵:
说白了就是每个样本的误差信号分别对每个权值求偏导。
那么误差信号就是:
矩阵形式的完全平方公式。两根竖线 ∥ 表示欧几里得范数,也就是常说的向量的模。
现在需要找到一个权值向量使上式最小作为 w(n+1) ,于是对上式对权值向量求导并使之为0,得:
解出 w 作为 w(n+1) 得:
这就是高斯-牛顿法的基本型。
自然这里还有要求 JT(n)J(n) 得是非负定的。于是通常会给它加上一个对角矩阵 δI 。 δ 是一个较小的正数, I 是单位矩阵。于是上式就变成:
维纳滤波器
然后接着推导。在这里误差信号为
ei=di−yi=di−wTxi
于是有
∂ei∂w=−xi
,
e′i(w)=ei(w(n))−xi
。
从而Jacobi矩阵为:
X 就是样本矩阵。
另外可知有 e=d−Xw 。
将这些带入到高斯-牛顿法的基本型中可得:
整理之后你会发现 w(n) 会被消掉,然后就干脆成了:
简直可以一开始就一次计算啊。也难怪前边用牛顿法可以一次就收敛。
然后定义 X 的伪逆为 X+=(XT(n)X(n))−1XT 。这样就可以表述成最优权值向量为样本矩阵的伪逆乘上期望响应:
这就像是《神机》第二章所讲的一次性计算分界的线性最小二乘分类器,所以这也叫 线性最小二乘滤波器。
当样本数量N趋于无穷时,就成了维纳滤波器。
R语言中用行代码即可算得权值向量:
W = solve(t(X) %*% X) %*% t(X) %*% d最小均方算法
反正《神机》是过了前面的大堆篇幅之后才开始讲回这章的主题…
其实所谓最小均方算法就是拿均方误差作为代价函数,并使之最小的算法,权值调整方法也是跟最速下降法一致。
只不过不同的是,前面的几个方法都是计算汇总了所有样本的误差再调整,而这里是逐个样本逐个计算误差逐个调整。每一个样本称为一个瞬像。
因为每个样本不同,每次权值调整的方向也不同而近似于随机,但是总体来说都是朝着最优的方向调整的。于是LMS算法也被称为随机梯度算法。
因此代价函数就成了:
称为代价函数的瞬时值。
求偏导后即可得:
于是权值调整方式就是这样:
η 同上为学习率参数。
R代码实现如下:
W = c(0,0) #初始化权值
eta = 1e-4 #学习率参数
n = 5 #进行5轮迭代
MSE = c() #均方根误差记录向量
for(t in 1:n){
for(i in 1:N){
e = d[i]-X[i,] %*% W
W = W + e*X[i,] #修正权值
E = d - X %*% W
MSE = append(MSE,mean(E**2)) #计算并记录均方差
}
}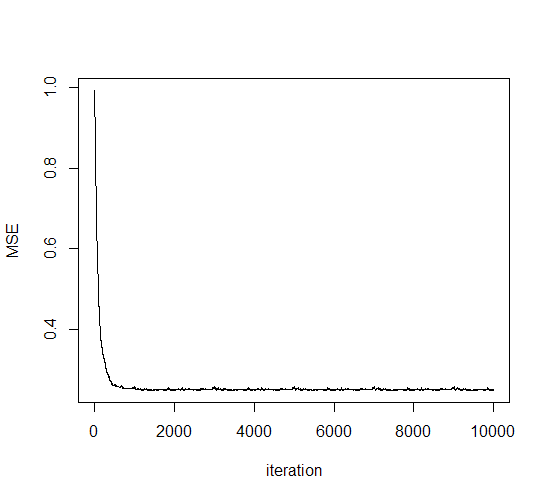
这里学习率参数设为1e-4。可见在第一轮迭代中就已经收敛。因而在大量样本的数据中LMS的随机梯度方法相比前面几个方法更有性能优势。
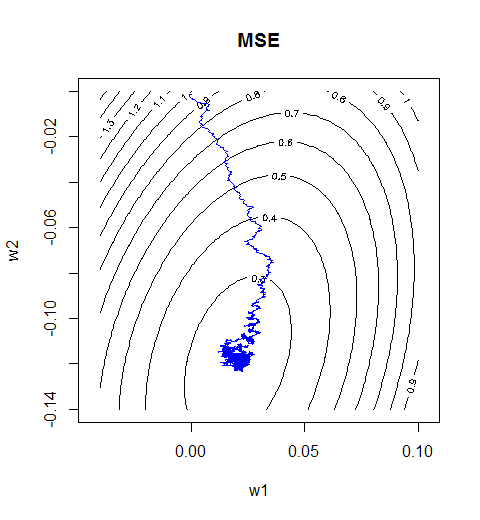
这里是权值向量调整的轨迹。尽管是边抖边走也最终还是走到了最优处,到了目的地之后就在原地做起了布朗运动。
学习率退火方案
限制LMS算法性能的一个因素就是学习率参数
η
被设为是固定的,更科学的方式应该是一开始大,后面越来越小。
于是就有人提出了一个形式,学习率参数应该随迭代次数变化:
η(n)=cn
。这里c是一个常数。
但是要是c设得比较大,导致一开始的时候
η
太大咋办?于是就又提出了下面的方式:
这里 η0 和 τ 都是可调常数。酱紫就可以在一开始的时候 η 不至于过大,而到了后期的时候接近于 cn 。这里 c=η0τ 。

















 1498
1498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









