







一、背景介绍
很多边缘提取算法提取的边缘点为无序点云,如下图所示,无序点云不利于后续各种应用,比如根据边缘计算点云面积、点云轮廓线规则化等。若对点云进行排序,则可以进行上述应用。但实际上,点云形状错综复杂,对点云进行排序难度会比较大。此次博客介绍一种针对简单形状点云的边缘点排序原理,对于复杂形状点云,仅供参考。
 |  |  |
二、旋转角大小排序
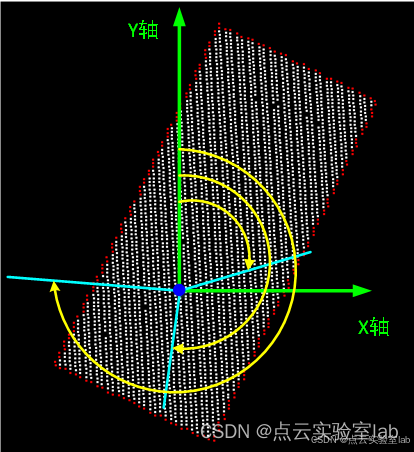
对于形状简单的点云,可以使用与某一方向的夹角,按照夹角大小进行排序,实现点的排序,如下图所示。如图所示,以y轴为起始旋转角开始的地方,每个轮廓点与以轴构成的旋转角不一致,按照旋转角从小到大进行排序,可以实现轮廓点的排序。
基于这一原理,具体步骤如下:
(1)中心计算:统计所有点的平均坐标作为中心
(2)计算旋转角:以y轴为起始方向,计算每个轮廓点与y轴的夹角,得到夹角集合
(3)角度排序:对角度从小到大进行排序,按照排序后的角度对轮廓点进行排序,即实现角度排序
三、测试
3.1 测试数据说明
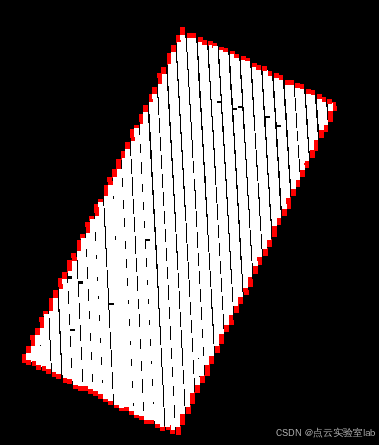
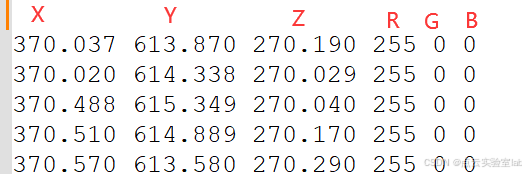
数据格式如图,x y z r g b,其中边缘点用红色表示,其r g b值为255 0 0。非边缘点用白色表示,其r g b值为255 255 255。
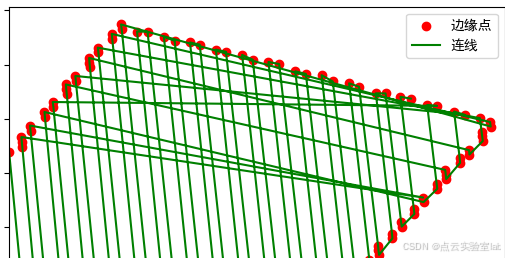
3.2 原始轮廓点直接连线
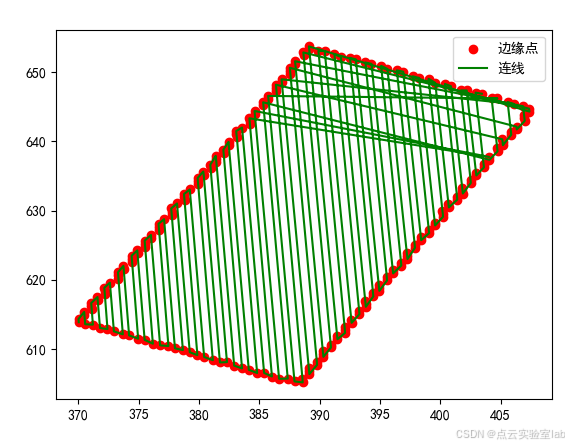
直接将文件中边缘轮廓点直接相连,结果如下。表明点之间是无序结构,直接连轮廓点,无法反应点云真实形状。
|  |
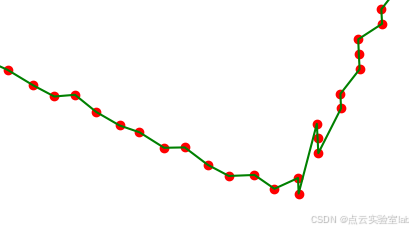
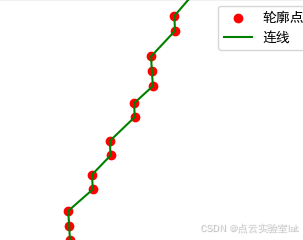
3.3 轮廓点排序后结果
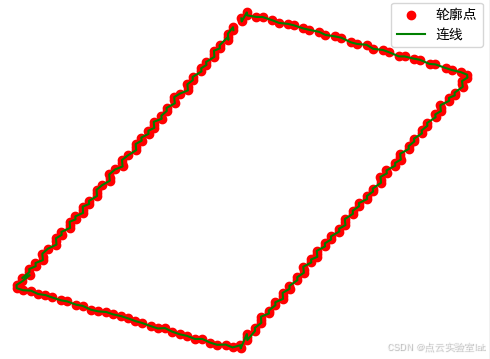
可以发现,对轮廓点进行排序后,构成的多边形能够较准确反应点云形状,局部放大图中,也可以看到轮廓点为有序结构。
|  |  |
| 排序后直接相连 | 局部放大 | 局部放大 |
四、源代码下载
根据上述介绍的原理,基于python、pycharm进行实现,包括测试数据与代码,下载链接地址:https://download.csdn.net/download/qq_32867925/90245007?spm=1001.2014.3001.5503
其中包含2个测试,一个为未排序时的结果,轮廓点无序;后一个为排序后结果。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











