






为什么突发奇想做这个,因为当时我在想我该如何控制机器人的运动,它的运动数据虽然Wiki上写的很清楚了,但是还是觉得抽象,不如自己写一个加深理解
输入
sudo apt install ros-noetic-rqt-robot-steering 下载安装控制机器人X,Z轴的控制包
下载完毕后打开ROS的src目录使用命令创建一个软件包
catkin_create_pkg velocity_listener rospy std_msgs geometry_msgs
使用Vscode打开刚刚创建的软件包,新建一个py文件
把这段代码粘到py中
#!/usr/bin/env python3
import rospy
from geometry_msgs.msg import Twist
def callback(data):
print(data.linear.x, data.angular.z)
def listener():
# 初始化节点
rospy.init_node('motion_listener', anonymous=True)
# 订阅Topic
rospy.Subscriber("/cmd_vel", Twist, callback)
# 保持监听状态
rospy.spin()
if __name__ == '__main__':
listener()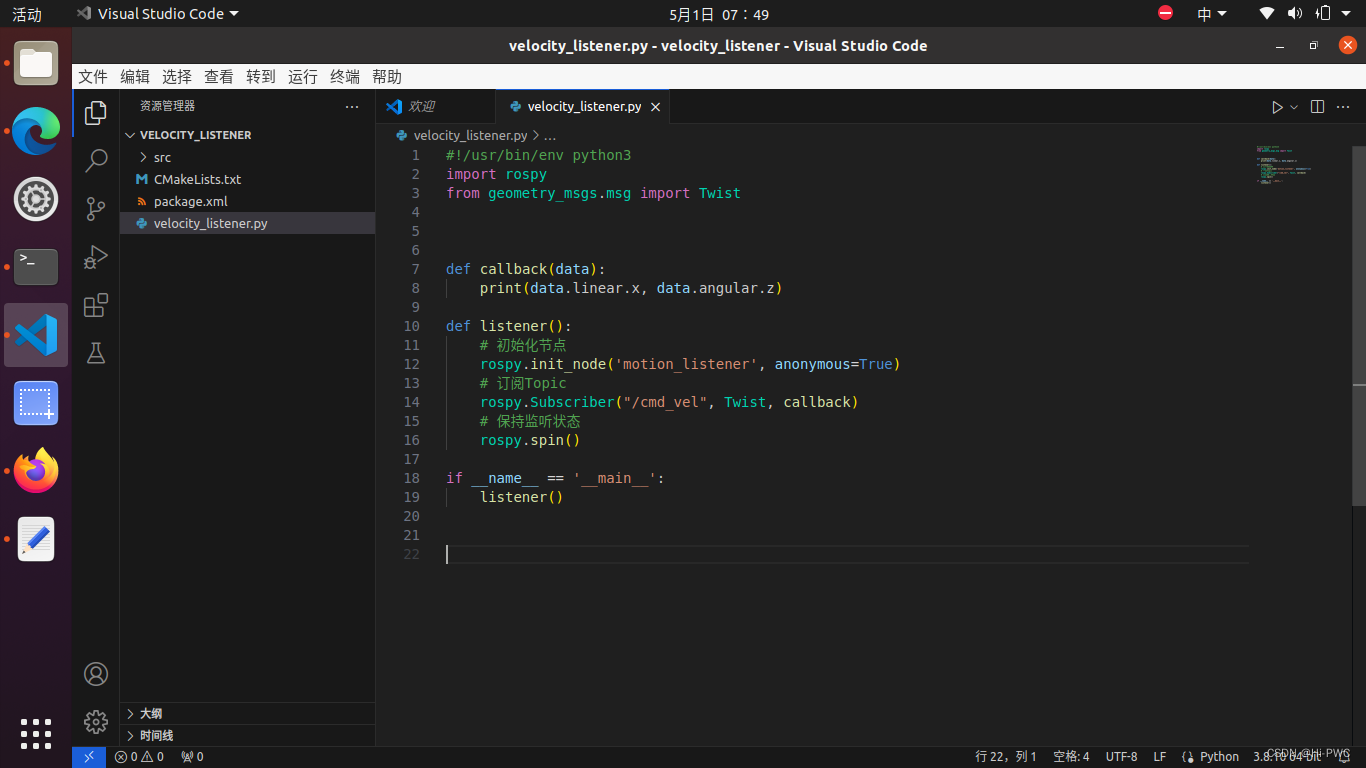
保存即可
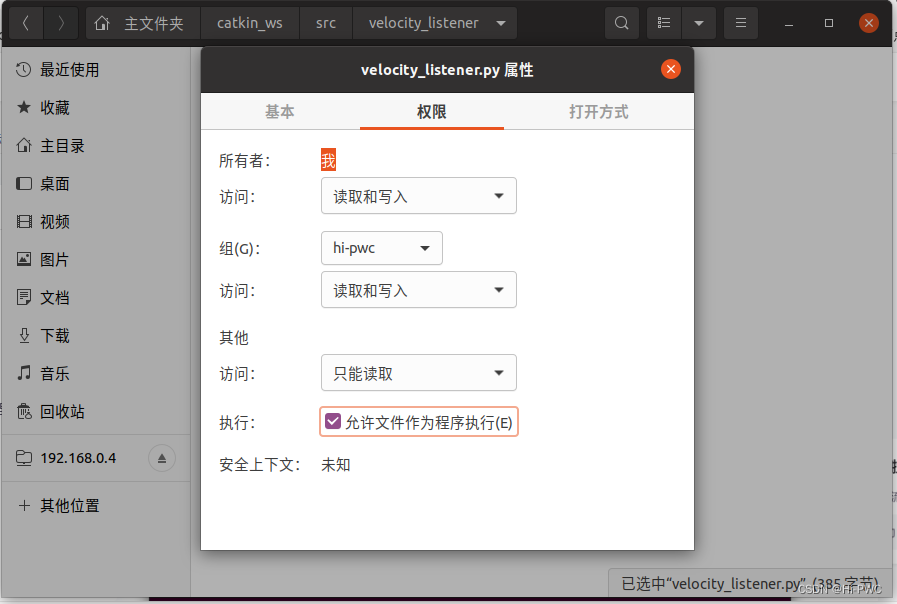
打开py文件的位置,给这个文件添加可执行权限
回到catkin工作目录,编译刚刚创建的软件包
准备工作就算做完了,接下来运行核心和两个软件包即可
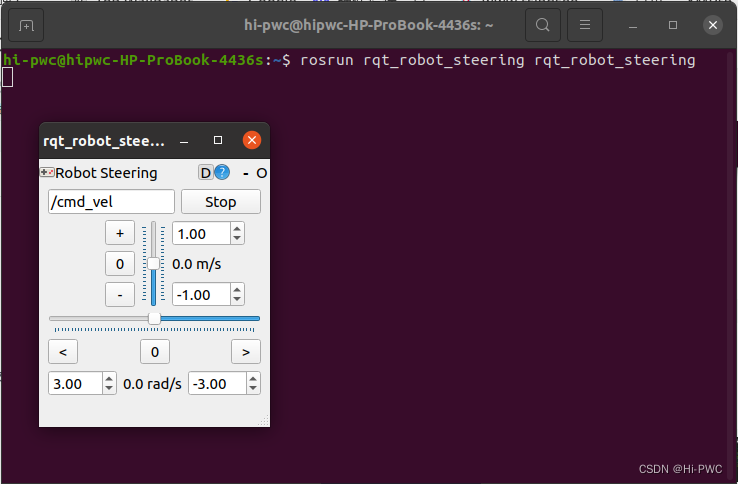
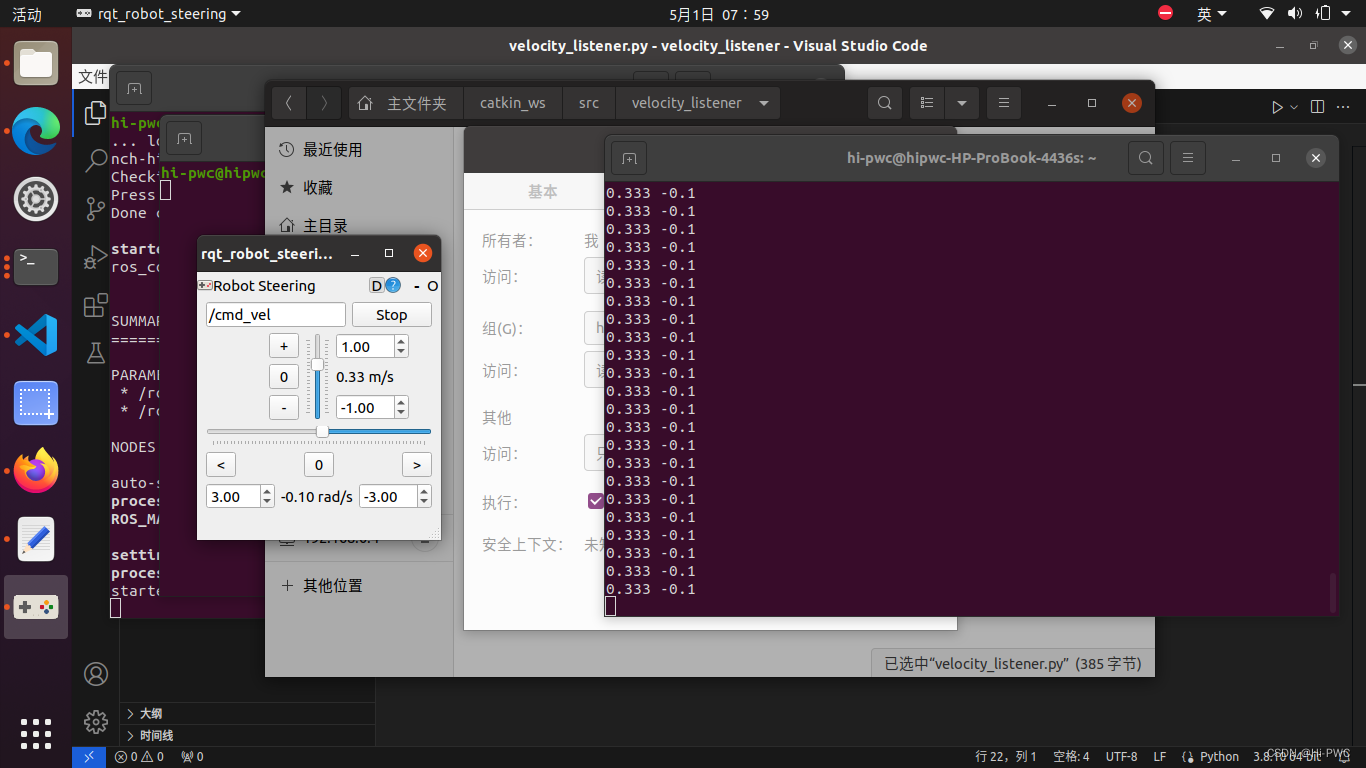
移动滑块就可以查看学习它的数据格式了















 1095
1095

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









