







原文地址:blog.liujunliang.com.cn
这里我先引用一篇详细文章来介绍A*算法
本文源码链接:点击打开链接
文章内容如下
简易地图
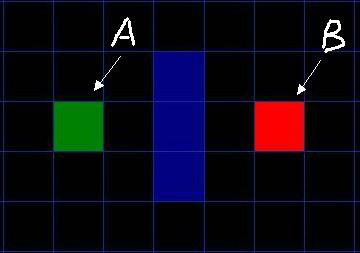
如图所示简易地图, 其中绿色方块的是起点 (用 A 表示), 中间蓝色的是障碍物, 红色的方块 (用 B 表示) 是目的地. 为了可以用一个二维数组来表示地图, 我们将地图划分成一个个的小方块.
二维数组在游戏中的应用是很多的, 比如贪吃蛇和俄罗斯方块基本原理就是移动方块而已. 而大型
游戏的地图, 则是将各种"地貌"铺在这样的小方块上.
寻路步骤
1. 从起点 A 开始, 把它作为待处理的方格存入一个"开启列表", 开启列表就是一个等待检查方格
的列表.
2. 寻找起点 A 周围可以到达的方格, 将它们放入"开启列表", 并设置它们的"父方格"为 A.
3. 从"开启列表"中删除起点 A, 并将起点 A 加入"关闭列表", "关闭列表"中存放的都是不需要再次检查的方格

图中浅绿色描边的方块表示已经加入 "开启列表" 等待检查. 淡蓝色描边的起点 A 表示已经放入
"关闭列表" , 它不需要再执行检查.
从 "开启列表" 中找出相对最靠谱的方块, 什么是最靠谱? 它们通过公式 F=G+H 来计算.
F = G + H
G 表示从起点 A 移动到网格上指定方格的移动耗费 (可沿斜方向移动).
H 表示从指定的方格移动到终点 B 的预计耗费 (H 有很多计算方法, 这里我们设定只可以上下左右移动).
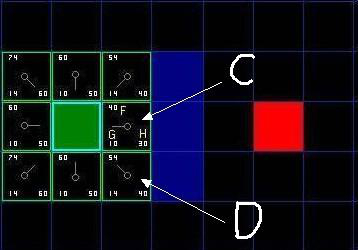
我们假设横向移动一个格子的耗费为 10, 为了便于计算, 沿斜方向移动一个格子耗费是 14. 为了
更直观的展示如何运算 FGH, 图中方块的左上角数字表示 F, 左下角表示 G, 右下角表示 H. 看看是否跟你心里想的结果一样?
从 "开启列表
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1746
1746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









