







 本文介绍了如何使用倍福TwinCAT3的MC_TorqueControl功能块,以汇川IS620N EtherCAT伺服为例,实现力矩模式控制。内容包括PDO参数配置、IO链接、PLC程序编写及结果测试,展示了力矩和速度限制的设定与切换方法。
本文介绍了如何使用倍福TwinCAT3的MC_TorqueControl功能块,以汇川IS620N EtherCAT伺服为例,实现力矩模式控制。内容包括PDO参数配置、IO链接、PLC程序编写及结果测试,展示了力矩和速度限制的设定与切换方法。
TC3通过MC_TorqueControl实现力矩模式的控制–以汇川IS620N为例。倍福TwinCAT3有MC_TorqueControl功能块能实现轴的力矩控制,但需要相应的PDO参数,本文讲解其控制过程。
- MC_TorqueControl功能块介绍
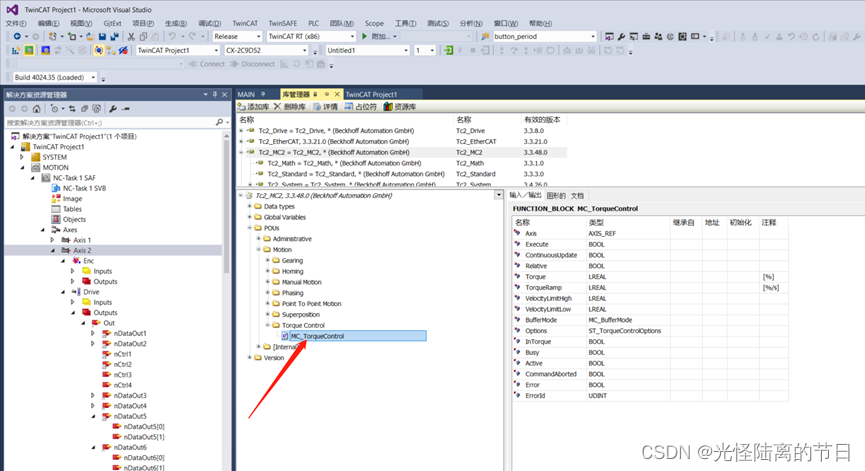
该功能块在帮助手册比较少,可参考虚拟学院的文档:“AX5000扭矩控制”。
-
测试的软硬件配置
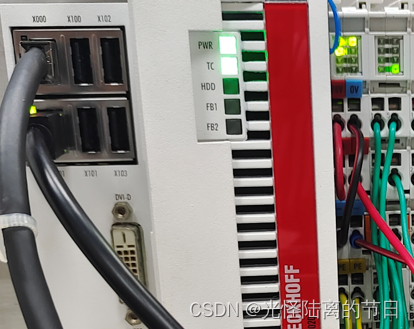
使用CE系统的TwinCAT3测试,伺服是汇川的EtherCAT伺服IS620N,如下:

-
IO配置
3.1扫描IO
首先扫描IO信号,如下所示:

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 6402
6402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











