







强化学习
- 使用强化学习能够让机器学着如何在环境中拿到高分, 表现出优秀的成绩. 而这些成绩背后却是他所付出的辛苦劳动, 不断的试错, 不断地尝试, 累积经验, 学习经验.
- 根据行为来打分,不会告诉你该怎么做,而是给这个行为打分。
- 下一次决策的时候记住那些可以得到高分的行为,进行这个行为,拿高分避免低分。

- RL算法们
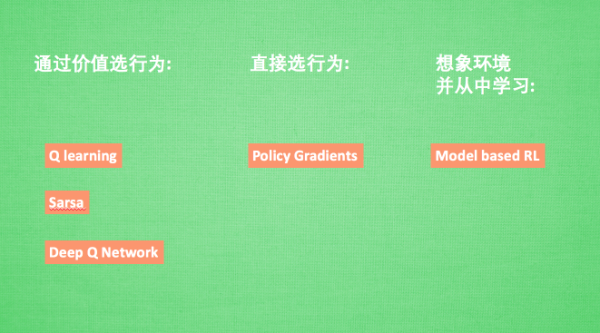
方法
不理解环境 model-free
-
根据真实世界的反馈,一步一步行动
-
Q-learning
-
Sarsa
-
Policy Gradients
理解环境 model-based
- 根据想象来预判下一步的行动,选择想象中最好的那一种
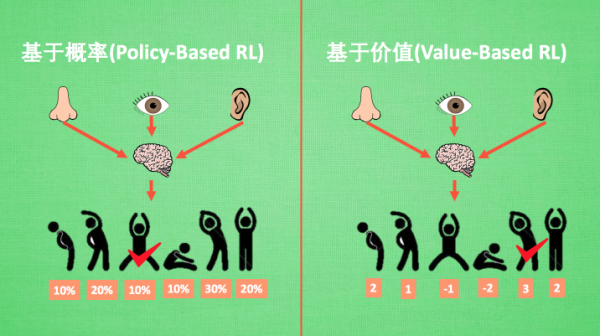
基于概率
- 根据计算的概率来采取行动,每一种都可能被选中,只是可能性大小的不同
- Policy Gradients
- 连续的动作
基于价值
- 根据所有动作的价值,根据价值最高的行动
- Q learning
- Sarsa
- 离散的动作
回合更新
- 游戏开始-结束之后
- 基础Policy Gradients
- Monte-Carlo Learning
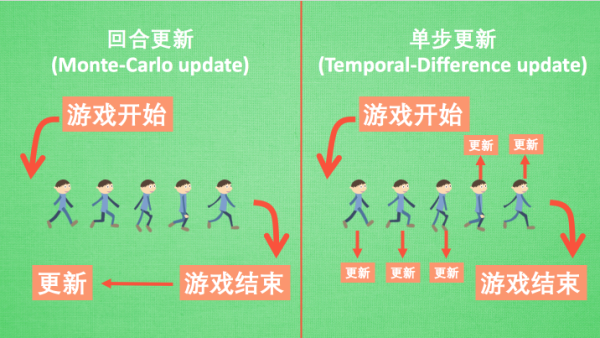
单步更新
- Q-learning
- Sarsa
- 升级版Policy Gradients
在线学习
- 本人边玩边学习
- sarsa
- sara( λ \lambda λ)
离线学习
- 自己玩或者看着别人玩,别人的经历也可以,不用边玩别学习
- Q-learning
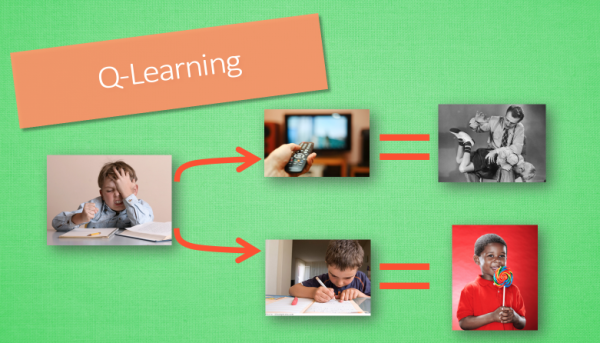
Q-learning
1.1行为准则
- 做作业和看电视的抉择
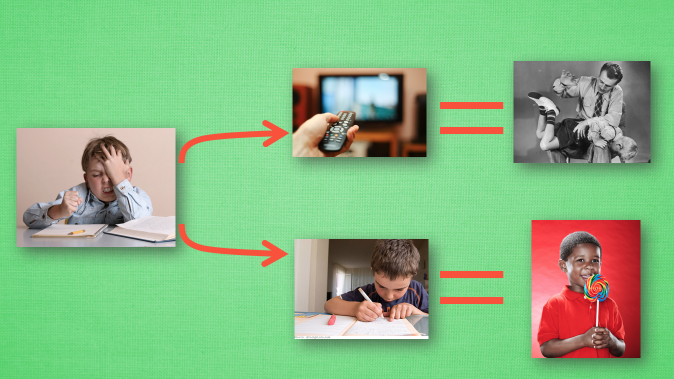
1.2 Q-learning 决策
- 选择reward大的action
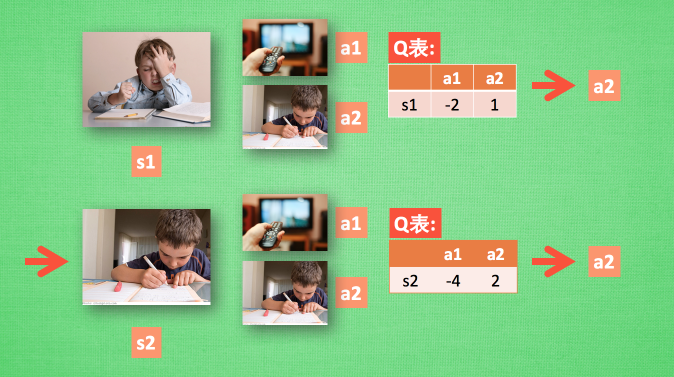
1.3 Q-learning更新
- Q-table怎么更新?

1.4 Q-learning 整体算法
- 贪婪的Q-learning
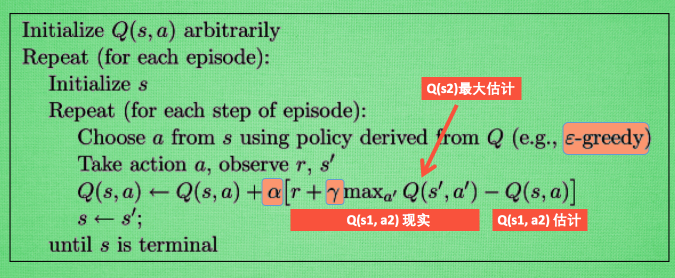
- 决策过程,根据reward来进行行为决策
- 会存在一个Q-table来存储不同状态下做不同行为的值,根据这个值来判断在某个状态下选择什么行为
- 记录行为值的方法,每种在一定状态下的行为都会有一个值Q(S,A),也就是说行为A在状态S下的值为Q(S,A)
- 进行决策的时候会选择**Q(S,A1)>Q(S,A2)**的时候的行为A1,再根据现实和估计值来更新Q(S,A1)
- 整个算法就是不断的更新Q-table中的值,根据新的值来判断在某个state采取什么样的action。
- 为了避免总是进行同一种决策,采用epsilon来控制是否贪婪决策。例如:epsilon=0.9,就是有90%的机会贪婪,10%的机会完全随机选择行为。
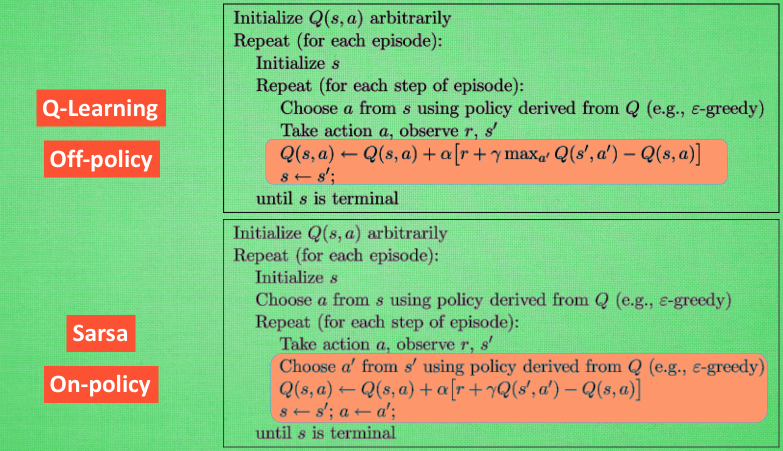
- Q-learning是一个off-policy的算法(离线),因为里面的max action可以让Q-table更新不是正在经历的经验。
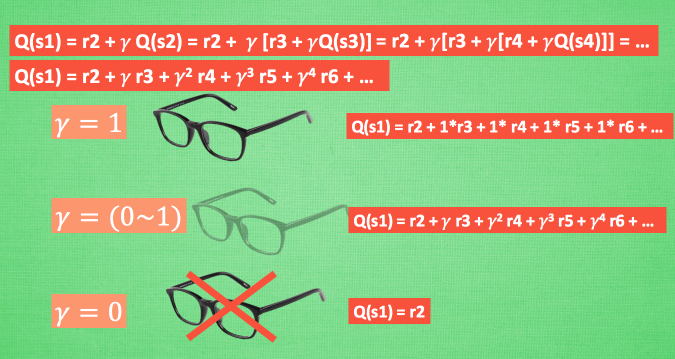
1.5 Q-learning中的Gamma
- Gamma对于Q-learning的影响
- 眼睛度数-眼前的利益和未来的利益
1.6 小例子-找宝藏(Q-learning)
- 三个py文件
- main.py 主函数
#main.py
from maze_env import Maze
from RL_brain import QLearningTable
def update():
# 学习 100 回合
for episode in range(100):
# 初始化 state 的观测值
observation = env.reset()
while True:
# 更新可视化环境
env.render()
# RL 大脑根据 state 的观测值挑选 action
action = RL.choose_action(str(observation))
# 探索者在环境中实施这个 action, 并得到环境返回的下一个 state 观测值, reward 和 done (是否是掉下地狱或者升上天堂)
observation_, reward, done = env.step(action)
# RL 从这个序列 (state, action, reward, state_) 中学习
RL.learn(str(observation), action, reward, str(observation_))
# 将下一个 state 的值传到下一次循环
observation = observation_
# 如果掉下地狱或者升上天堂, 这回合就结束了
if done:
break
# 结束游戏并关闭窗口
print('game over')
env.destroy()
if __name__ == "__main__":
# 定义环境 env 和 RL 方式
env = Maze()
RL = QLearningTable(actions=list(range(env.n_actions)))
# 开始可视化环境 env
env.after(100, update)
env.mainloop()
- RL_brain.py 强化学习的决策部分
- 初始部分,功能
class QLearningTable:
# 初始化
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
# 选行为
def choose_action(self, observation):
# 学习更新参数
#s:当前state
#a:action
#r:reward:
#s_:next state
def learn(self, s, a, r, s_):
# 检测 state 是否存在
def check_state_exist(self, state):
- 完整部分
import numpy as np
import pandas as pd
class QLearningTable:
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
# a list
self.actions = actions
# 学习率
self.lr = learning_rate
# 奖励衰减
self.gamma = reward_decay
# 贪婪度
self.epsilon = e_greedy
#初始 q_table
self.q_table = pd.DataFrame(columns=self.actions, dtype=np.float64)
def choose_action(self, observation):
#检测本state是否在q_table中存在
self.check_state_exist(observation)
# 选择 action
if np.random.uniform() < self.epsilon:
# 选择 Q value 最高的 action
state_action = self.q_table.loc[observation, :]
# 同一个 state, 可能会有多个相同的 Q action value, 所以我们乱序一下
action = np.random.choice(state_action[state_action == np.max(state_action)].index)
# 随机选择 action
else:
action = np.random.choice(self.actions)
return action
def learn(self, s, a, r, s_):
# 检测 q_table 中是否存在 s_
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
# 下个 state 不是 终止符
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.loc[s_, :].max() # next state is not terminal
else:
# 下个 state 是终止符
q_target = r # next state is terminal
# 更新对应的 state-action 值
self.q_table.loc[s, a] += self.lr * (q_target - q_predict)
def check_state_exist(self, state):
if state not in self.q_table.index:
# append new state to q table
self.q_table = self.q_table.append(
pd.Series(
[0]*len(self.actions),
index=self.q_table.columns,
name=state,
)
)
- maze_env.py 环境(见文件maze.env.py)
Sarsa
2.1 学习还是看电视?
2.2 Sarsa决策
- 和Q-learning类似

2.3 Sarsa更新准则
- Sarsa的Q-table更新方式

2.4 Sarsa和Q-learning对比
- 勇敢的Q-learning 和谨慎的Sarsa
-
整个算法和Q-learning一样,不断的更新Q-table的值,然后再根据新的值来判断在某个state采取怎么样的action。
-
不同Q-learning的是,更新Q-table方式不一样。
-
Q-learning是估计,Sarsa是说到做到
-
当Sarsa 和 Q-Learning处在状态s时,均选择可带来最大回报的动作a,这样可到达状态s’。而在下一步,如果使用Q-Learning, 则会观察在s’上哪个动作会带来最大回报(不会真正执行该动作,仅用来更新Q表),在s’上做决定时, 再基于更新后的Q表选择动作。而 Sarsa 是实践派,在**s’ 这一步估算的动作也是接下来要执行的动作,所以 Q(s, a) 的现实值也会稍稍改动,去掉maxQ,**取而代之的是在s’ 上实实在在选取的a’ 的Q值,最后像Q-Learning一样求出现实和估计的差距并更新Q表里的Q(s, a)。
-
Sarsa在当前state已经想好了state对应的action,而且还想好了下一个state_和下一个action_(Q-learning没有想好下一个,只能是知道根据当前的值选择的action
-
更新Q(s,a)的时候,Sarsa是基于下一个Q(s_,a_),(Q-learning是基于maxQ(s_)
-
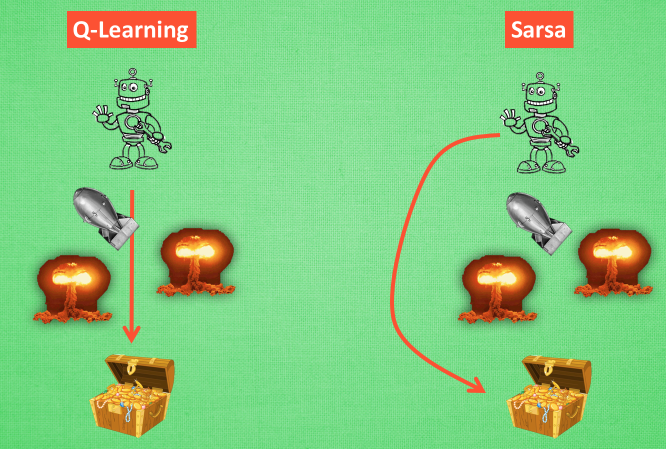
Q-learning永远选择最好的,Sarsa选择最保险的(胆小的sarsa);可以认为Q-learning是一种更加贪婪的方法,不考虑其他的非maxQ的结果。我们理解Q-learning是一种贪婪、大胆勇敢的算法,不考虑错误,不考虑死亡。而Sarsa是一种保守,敏感的算法,对于每一步的决策,都处于一种远离危险的状态。
-
只能从自身的经验学习
-
Q learning 机器人 永远都会选择最近的一条通往成功的道路, 不管这条路会有多危险. 而 Sarsa 则是相当保守, 他会选择离危险远远的, 拿到宝藏是次要的, 保住自己的小命才是王道.
2.5 小例子-找宝藏(Sarsa)
from maze_env import Maze
from RL_brain import SarsaTable
def update():
for episode in range(100):
# 初始化环境
observation = env.reset()
# Sarsa 根据 state 观测选择行为
action = RL.choose_action(str(observation))
while True:
# 刷新环境
env.render()
# 在环境中采取行为, 获得下一个 state_ (obervation_), reward, 和是否终止
observation_, reward, done = env.step(action)
# 根据下一个 state (obervation_) 选取下一个 action_
action_ = RL.choose_action(str(observation_))
# 从 (s, a, r, s, a) 中学习, 更新 Q_tabel 的参数 ==> Sarsa
RL.learn(str(observation), action, reward, str(observation_), action_)
# 将下一个当成下一步的 state (observation) and action
observation = observation_
action = action_
# 终止时跳出循环
if done:
break
# 大循环完毕
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze()
RL = SarsaTable(actions=list(range(env.n_actions)))
env.after(100, update)
env.mainloop()
- Sarsa主结构
import numpy as np
import pandas as pd
class RL(object):
def __init__(self, action_space, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
... # 和 QLearningTable 中的代码一样
def check_state_exist(self, state):
... # 和 QLearningTable 中的代码一样
def choose_action(self, observation):
... # 和 QLearningTable 中的代码一样
def learn(self, *args):
pass # 每种的都有点不同, 所以用 pass
class QLearningTable(RL): # 继承了父类 RL
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(QLearningTable, self).__init__(actions, learning_rate, reward_decay, e_greedy) # 表示继承关系
def learn(self, s, a, r, s_): # learn 的方法在每种类型中有不一样, 需重新定义
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.loc[s_, :].max()
else:
q_target = r
self.q_table.loc[s, a] += self.lr * (q_target - q_predict)
class SarsaTable(RL): # 继承 RL class
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(SarsaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy) # 表示继承关系
def learn(self, s, a, r, s_, a_):
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != 'terminal':
# q_target 基于选好的 a_ 而不是 Q(s_) 的最大值
q_target = r + self.gamma * self.q_table.loc[s_, a_]
else:
q_target = r # 如果 s_ 是终止符
# 更新 q_table
self.q_table.loc[s, a] += self.lr * (q_target - q_predict)
Sarsa( λ \lambda λ)
- Sarsa的更新版本
- 单步更新,之后获得reward后才会更新(只有获得宝藏时,才会更新获得宝藏的上一步,这一步和获得宝藏有关系),之前为了获得宝藏走的所有步都被认为和宝藏没有关系的,
- 回合更新,虽然是到了回合的结尾才会更新,所有步都进行更新,都是有关系的,所以这些步在下一回合的概率更大了一些。
- λ \lambda λ是一个衰变值
- 取0 单步更新
- 去1 回合更新
- 0-1之间,越大和宝藏越近的地方更新越大。这样我们就不用受限于单步更新的每次只能更新最近的一步, 我们可以更有效率的更新所有相关步了.
DQN(Deep Q Network)
3.1 神经网络
- 由来:传统的表格形式强化学习有一个瓶颈,使用表格存储每一个state和在这个state每个action对应的Q值。例如:围棋,一个19*19=361个子,空间复杂度约等于 1 0 93 10^{93} 1093而宇宙中总原子的数量才10^{80}个
- 缺点:在当今问题太复杂的情况下不能胜任,因为状态太多,例如围棋棋盘的状态
- 解决方法:
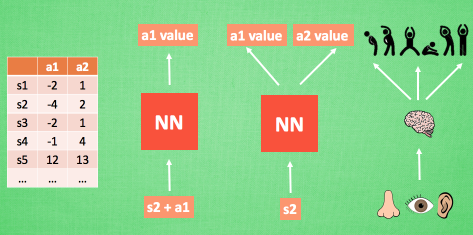
- 1.利用神经网络来处理输入的状态(状态和动作),从而得到一个Q值
- 2.输入状态,输出所有动作值,然后根据Q-learning的贪婪原则,选择值最大的动作。
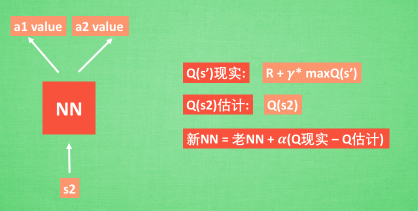
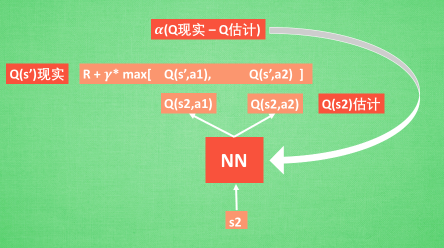
3.2 更新神经网络
- 基于第二种神经网络
- Q现实:Q-learning中的Q-table的值
- Q估计:神经网络得到的
3.3 Experience replay
- 记忆库(重复学习)
- 所以每次 DQN 更新的时候, 我们都可以随机抽取一些之前的经历进行学习. 随机抽取这种做法打乱了经历之间的相关性, 也使得神经网络更新更有效率

3.4 Fixed Q-targets
- 冻结参数,切断相关性
- 也是一种打乱相关性的机理, 如果使用 fixed Q-targets, 我们就会在 DQN 中使用到两个结构相同但参数不同的神经网络, 预测 Q 估计 的神经网络具备最新的参数, 而预测 Q 现实 的神经网络使用的参数则是很久以前的.
3.5 DQN算法详解
- 在Q-learing的基础上加了一些装饰
- 1.记忆库
- 2.利用神经网络计算Q值(而不是Q-table).‘
- 两个结构相同的神经网络分别计算Q现实和Q估计。
- 每隔C步进行Q现实和Q估计的更新
3.6 小例子-找宝藏(DQN)
-
两个结构相同但参数不同的神经网络,Q现实和Q估计
-
DQN_modified.py部分代码 _build_net()
def _build_net(self):
# ------------------ all inputs ------------------------
self.s = tf.placeholder(tf.float32, [None, self.n_features], name='s') # input State
self.s_ = tf.placeholder(tf.float32, [None, self.n_features], name='s_') # input Next State
self.r = tf.placeholder(tf.float32, [None, ], name='r') # input Reward
self.a = tf.placeholder(tf.int32, [None, ], name='a') # input Action
w_initializer, b_initializer = tf.random_normal_initializer(0., 0.3), tf.constant_initializer(0.1)
# ------------------ build evaluate_net ------------------
with tf.variable_scope('eval_net'):
e1 = tf.layers.dense(self.s, 20, tf.nn.relu, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='e1')
self.q_eval = tf.layers.dense(e1, self.n_actions, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='q')
# ------------------ build target_net ------------------
with tf.variable_scope('target_net'):
t1 = tf.layers.dense(self.s_, 20, tf.nn.relu, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='t1')
self.q_next = tf.layers.dense(t1, self.n_actions, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='t2')
with tf.variable_scope('q_target'):
q_target = self.r + self.gamma * tf.reduce_max(self.q_next, axis=1, name='Qmax_s_') # shape=(None, )
self.q_target = tf.stop_gradient(q_target)
with tf.variable_scope('q_eval'):
a_indices = tf.stack([tf.range(tf.shape(self.a)[0], dtype=tf.int32), self.a], axis=1)
self.q_eval_wrt_a = tf.gather_nd(params=self.q_eval, indices=a_indices) # shape=(None, )
with tf.variable_scope('loss'):
self.loss = tf.reduce_mean(tf.squared_difference(self.q_target, self.q_eval_wrt_a, name='TD_error'))
with tf.variable_scope('train'):
self._train_op = tf.train.RMSPropOptimizer(self.lr).minimize(self.loss)
- 学习部分
def learn(self):
# check to replace target parameters
if self.learn_step_counter % self.replace_target_iter == 0:
self.sess.run(self.target_replace_op)
print('\ntarget_params_replaced\n')
# sample batch memory from all memory
if self.memory_counter > self.memory_size:
sample_index = np.random.choice(self.memory_size, size=self.batch_size)
else:
sample_index = np.random.choice(self.memory_counter, size=self.batch_size)
batch_memory = self.memory[sample_index, :]
_, cost = self.sess.run(
[self._train_op, self.loss],
feed_dict={
self.s: batch_memory[:, :self.n_features],
self.a: batch_memory[:, self.n_features],
self.r: batch_memory[:, self.n_features + 1],
self.s_: batch_memory[:, -self.n_features:],
})
self.cost_his.append(cost)
# increasing epsilon
self.epsilon = self.epsilon + self.epsilon_increment if self.epsilon < self.epsilon_max else self.epsilon_max
self.learn_step_counter += 1
- 主函数部分
def run_maze():
step = 0 # 用来控制什么时候学习
for episode in range(300):
# 初始化环境
observation = env.reset()
while True:
# 刷新环境
env.render()
# DQN 根据观测值选择行为
action = RL.choose_action(observation)
# 环境根据行为给出下一个 state, reward, 是否终止
observation_, reward, done = env.step(action)
# DQN 存储记忆
RL.store_transition(observation, action, reward, observation_)
# 控制学习起始时间和频率 (先累积一些记忆再开始学习)
if (step > 200) and (step % 5 == 0):
RL.learn()
# 将下一个 state_ 变为 下次循环的 state
observation = observation_
# 如果终止, 就跳出循环
if done:
break
step += 1 # 总步数
# end of game
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze()
RL = DeepQNetwork(env.n_actions, env.n_features,
learning_rate=0.01,
reward_decay=0.9,
e_greedy=0.9,
replace_target_iter=200, # 每 200 步替换一次 target_net 的参数
memory_size=2000, # 记忆上限
# output_graph=True # 是否输出 tensorboard 文件
)
env.after(100, run_maze)
env.mainloop()
RL.plot_cost() # 观看神经网络的误差曲线
-
具体代码也已经一同打包上传
-
或者点这里
-
from zhuqing















 4409
4409

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









