









线性变换包括旋转、缩放、投影、镜像、切变等,不包括平移。包含平移的变换称作仿射变换。3D中的仿射变换不能用
3
×
3
3×3
3×3 矩阵表达,只能用用
4
×
4
4×4
4×4 矩阵表达仿射变换。
考虑2D 中将一物体顺时针旋转20°:旋转物体,意味着旋转物体上所有的点,这些点将被移动到一个新的位置,我们使用同一坐标系来描述变换前和变换后点的位置。如图:
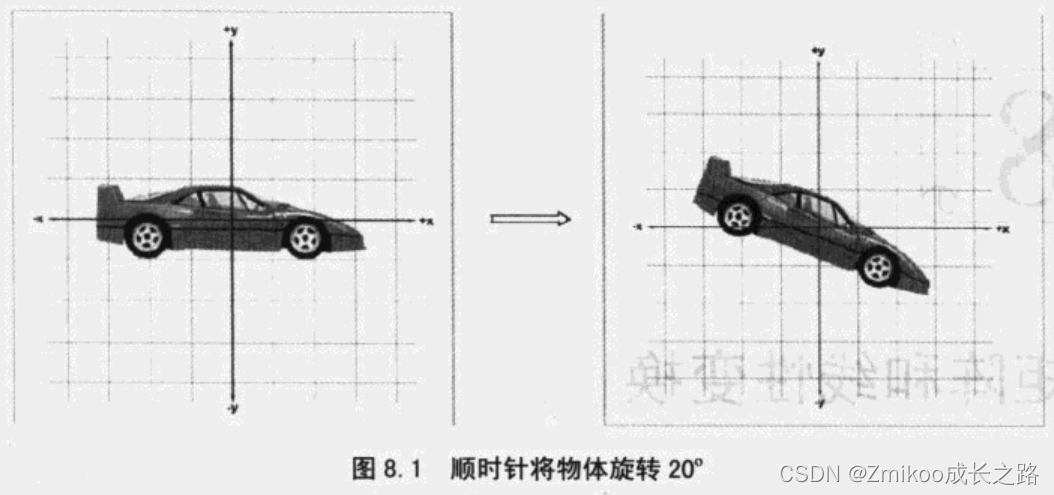
另一种方式:变换坐标系。旋转坐标系时,物体上的点实际没有移动,只是在另一个坐标系中描述它的位置而已。如图:

这两种变换实际上是等价的,将物体变换一个量等价于将坐标系变换一个相反的量。
当有多个变换时,则需要以相反的顺序变换相反的量。例如,将物体顺时针旋转20°,扩大200%,等价于将坐标系缩小200%,再逆时针旋转20°。
旋转
2D中的旋转
在2D环境中,物体只能绕某个点旋转,这里限制物体只绕原点旋转。2D中绕原点的旋转只有一个参数:角度
θ
θ
θ,它描述了旋转量。逆时针旋转经常(不是必须)被认为是正方向,顺时针方向是负方向。下图展示了基向量
p
⃗
\vec p
p
q
⃗
\vec q
q绕原点旋转,得到新的基向量
p
⃗
′
\vec p′
p′,
q
⃗
′
\vec q′
q′。
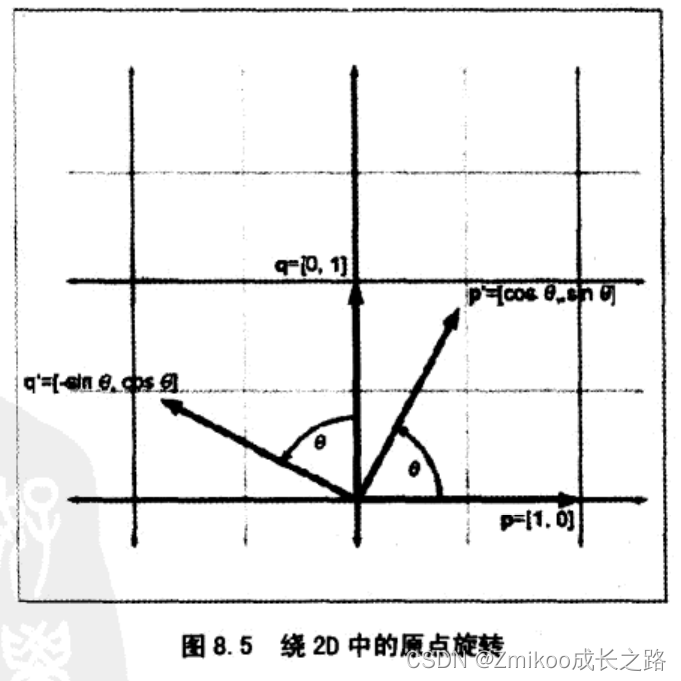
旋转后基向量的值,可以构造矩阵如下:
R
(
θ
)
=
[
p
⃗
′
q
⃗
′
]
=
[
c
o
s
θ
s
i
n
θ
−
s
i
n
θ
c
o
s
θ
]
R(θ)=\begin{bmatrix} \vec p′ \\ \vec q′ \end{bmatrix}=\begin{bmatrix} cosθ&sinθ \\ -sinθ&cosθ \end{bmatrix}
R(θ)=[p′q′]=[cosθ−sinθsinθcosθ]
3D中的旋转
在3D场景中,绕轴旋转而不是点(此时,轴指的是旋转所绕的直线,不一定是笛卡尔坐标轴x,y或z)。由于暂不考虑平移,所以只讨论旋转轴穿过原点的情况。
绕轴旋转
θ
°
θ°
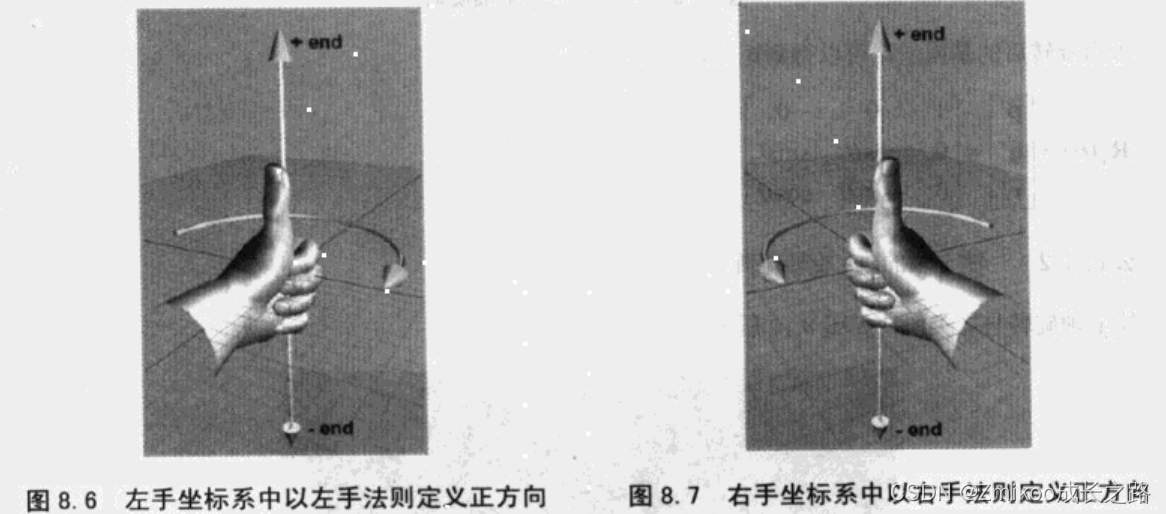
θ° 时,必须知道哪个方向被认为“正”,哪个方向被认为“负”,左手坐标系中定义此方向的规则为左手法则: 伸出左手,大拇指向上,其余四指弯曲,大拇指指向旋转轴的正方向,此时四指弯曲的方向就是旋转的正方向。如果用的是右手坐标系,则使用右手法则。
绕x轴旋转

旋转后的基向量
R
x
(
θ
)
=
[
p
⃗
′
q
⃗
′
r
⃗
′
]
=
[
1
0
0
0
c
o
s
θ
s
i
n
θ
0
−
s
i
n
θ
c
o
s
θ
]
R_x(θ)=\begin{bmatrix}\vec p′ \\ \vec q′ \\ \vec r′ \end{bmatrix}=\begin{bmatrix} 1&0&0 \\ 0&cosθ&sinθ\\ 0&-sinθ&cosθ \end{bmatrix}
Rx(θ)=⎣⎡p′q′r′⎦⎤=⎣⎡1000cosθ−sinθ0sinθcosθ⎦⎤
绕Y轴与之类似:
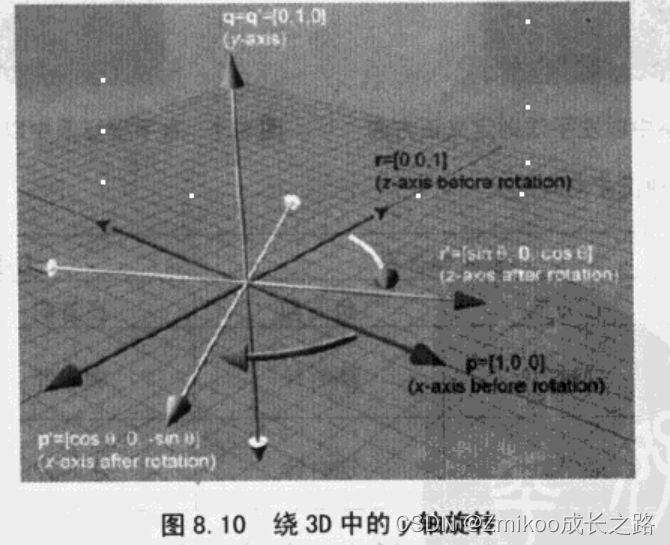
旋转后的基向量:
R
y
(
θ
)
=
[
p
⃗
′
q
⃗
′
r
⃗
′
]
=
[
c
o
s
θ
0
−
s
i
n
θ
0
1
0
s
i
n
θ
0
c
o
s
θ
]
R_y(θ)=\begin{bmatrix}\vec p′ \\ \vec q′ \\ \vec r′ \end{bmatrix}=\begin{bmatrix} cosθ&0&-sinθ \\ 0&1&0\\ sinθ&0&cosθ \end{bmatrix}
Ry(θ)=⎣⎡p′q′r′⎦⎤=⎣⎡cosθ0sinθ010−sinθ0cosθ⎦⎤
绕z轴:
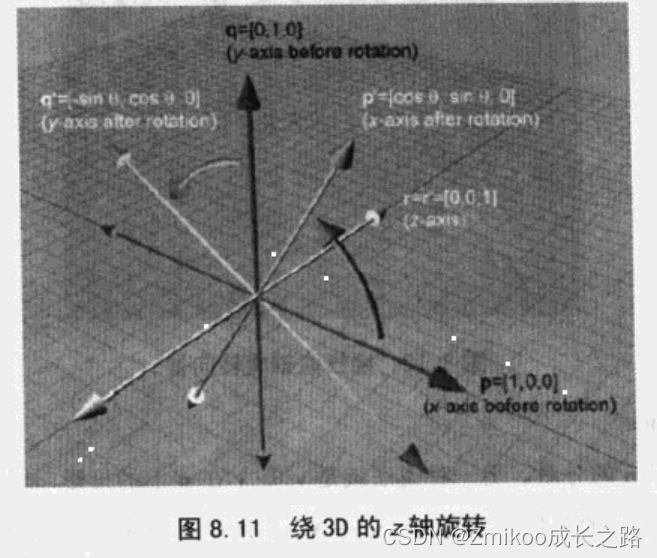
旋转后的基向量:
R
z
(
θ
)
=
[
p
⃗
′
q
⃗
′
r
⃗
′
]
=
[
c
o
s
θ
s
i
n
θ
0
−
s
i
n
θ
c
o
s
θ
0
0
0
1
]
R_z(θ)=\begin{bmatrix}\vec p′ \\ \vec q′ \\ \vec r′ \end{bmatrix}=\begin{bmatrix} cosθ&sinθ&0 \\ -sinθ&cosθ&0\\ 0&0&1 \end{bmatrix}
Rz(θ)=⎣⎡p′q′r′⎦⎤=⎣⎡cosθ−sinθ0sinθcosθ0001⎦⎤
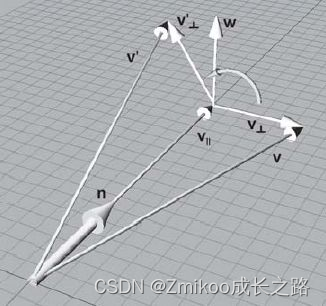
绕任意轴旋转
由于不考虑平移,假设旋转轴通过原点。用单位向量
n
⃗
\vec n
n描述旋转轴,和前面一样用
θ
θ
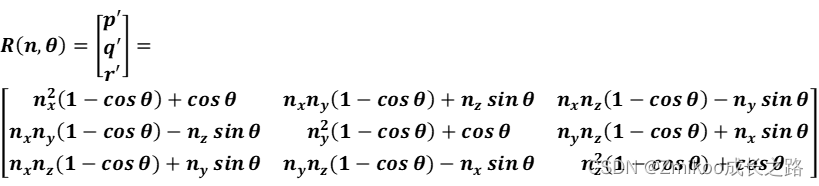
θ 描述旋转量。也就是说,我们想得到满足下面条件的矩阵
R
(
n
⃗
,
θ
)
R(\vec n,θ)
R(n,θ):
v
⃗
R
(
n
⃗
,
θ
)
=
v
⃗
′
\vec vR(\vec n,θ)=\vec v′
vR(n,θ)=v′ (
v
⃗
′
\vec v′
v′是
v
⃗
\vec v
v 绕轴
n
⃗
\vec n
n 旋转
θ
θ
θ后的向量)
缩放
如果在各方向应用同比例的缩放(缩放因子
k
k
k),并且沿原点“膨胀”物体,那么就是均匀缩放。均匀缩放可以保持物体的角度和比例不变。如果长度增加或减小因子
k
k
k ,则面积增加或减小因子
k
2
k^2
k2,在3D中,体积的因子是
k
3
k^3
k3。
如果需要“挤压”或“拉伸”物体,在不同的方向应用不同的因子,这称作非均匀缩放。非均匀缩放时,物体角度将发生变化。视各方向缩放因子的不同,长度、面积、体积的变化因子也各不相同。
如果
∣
k
∣
<
1
∣k∣<1
∣k∣<1,物体将“变短”;如果
∣
k
∣
>
1
∣k∣>1
∣k∣>1,物体“变长”。如果
k
=
0
k=0
k=0,就是正交投影,如果
k
<
0
k<0
k<0就是镜像。
沿坐标轴的缩放
2D中有两个缩放因子,
k
x
k_x
kx 和
k
y
k_y
ky。
基向量
p
⃗
\vec p
p
q
⃗
\vec q
q由相应的缩放因子单独影响:
p
⃗
′
=
k
x
p
⃗
=
k
x
[
1
,
0
]
=
[
k
x
,
0
]
\vec p′=k_x\vec p=k_x[1,0]=[k_x,0]
p′=kxp=kx[1,0]=[kx,0]
q
⃗
′
=
k
y
q
⃗
=
k
y
[
0
,
1
]
=
[
0
,
k
y
]
\vec q′=k_y\vec q=k_y[0,1]=[0,k_y]
q′=kyq=ky[0,1]=[0,ky]

用基向量构造矩阵:
S
(
k
x
,
k
y
)
=
[
p
⃗
′
q
⃗
′
]
=
[
k
x
0
0
k
y
]
S(k_x,k_y)=\begin{bmatrix}\vec p′\\ \vec q′\end{bmatrix}=\begin{bmatrix}k_x&0\\0&k_y\end{bmatrix}
S(kx,ky)=[p′q′]=[kx00ky]
3D需要增加第三个缩放因子
k
z
k_z
kz,3D的缩放矩阵:
S
(
k
x
,
k
y
,
k
z
)
=
[
k
x
0
0
0
k
y
0
0
0
k
z
]
S(k_x,k_y,k_z)=\begin{bmatrix}k_x&0&0\\0&k_y&0\\0&0&k_z\end{bmatrix}
S(kx,ky,kz)=⎣⎡kx000ky000kz⎦⎤
沿任意方向缩放
我们可以不依赖于坐标系而沿任意方向进行缩放。设 n ⃗ \vec n n 为平行于缩放方向的单位向量, k k k为缩放因子,缩放沿穿过原点并平行于 n ⃗ \vec n n 的直线(2D中)或平面(3D中)进行。

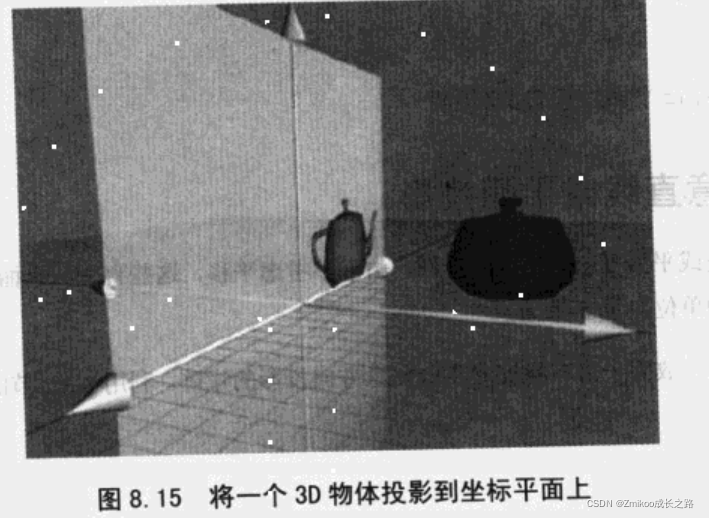
正交投影
一般来说,投影意味着降维操作。有一种投影方法是在某个方向上用零作为缩放因子。这种情况下,所有点都被拉平至垂直的轴(2D)或平面(3D)上。这种类型的投影称作正交投影,或者平行投影,因为从原来的点到投影点的直线相互平行。
向坐标轴或平面投影在实际变换中不常发生,大多数情况是向低维的变量赋值,且要抛弃维数时。例如,将3D点赋值给2D点,抛弃z分量,只复制x和y。
通过使垂直方向上的缩放因子为零,就能向坐标轴或平面投影。
向
x
x
x 轴投影的2D矩阵:
P
x
=
S
(
[
0
,
1
]
,
0
)
=
[
1
0
0
0
]
P_x=S([0,1],0)=\begin{bmatrix}1&0\\0&0\end{bmatrix}
Px=S([0,1],0)=[1000]
向
y
y
y 轴投影的2D矩阵:
P
y
=
S
(
[
1
,
0
]
,
0
)
=
[
0
0
0
1
]
P_y=S([1,0],0)=\begin{bmatrix}0&0\\0&1\end{bmatrix}
Py=S([1,0],0)=[0001]
向
x
y
xy
xy 平面投影的3D矩阵:
P
x
y
=
S
(
[
0
,
0
,
1
]
,
0
)
=
[
1
0
0
0
1
0
0
0
0
]
P_{xy}=S([0,0,1],0)=\begin{bmatrix}1&0&0\\0&1&0\\0&0&0\end{bmatrix}
Pxy=S([0,0,1],0)=⎣⎡100010000⎦⎤
向
x
z
xz
xz 平面投影的3D矩阵:
P
x
z
=
S
(
[
0
,
1
,
0
]
,
0
)
=
[
1
0
0
0
0
0
0
0
1
]
P_{xz}=S([0,1,0],0)=\begin{bmatrix}1&0&0\\0&0&0\\0&0&1\end{bmatrix}
Pxz=S([0,1,0],0)=⎣⎡100000001⎦⎤
向
y
z
yz
yz 平面投影的3D矩阵:
P
y
z
=
S
(
[
1
,
0
,
0
]
,
0
)
=
[
0
0
0
0
1
0
0
0
1
]
P_{yz}=S([1,0,0],0)=\begin{bmatrix}0&0&0\\0&1&0\\0&0&1\end{bmatrix}
Pyz=S([1,0,0],0)=⎣⎡000010001⎦⎤
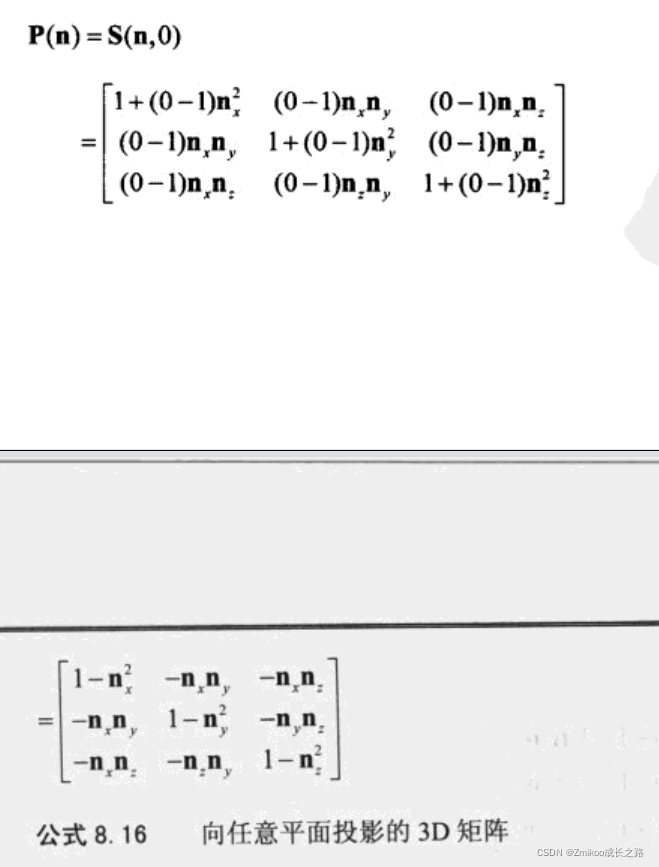
向任意直线或平面投影
也能向任意直线或平面投影。由于不考虑平移,这些直线或平面必须通过原点。投影由垂直于直线或平面的单位向量
n
⃗
\vec n
n定义。
通过使该方向的缩放因子为零能够导出向任意方向投影的矩阵。
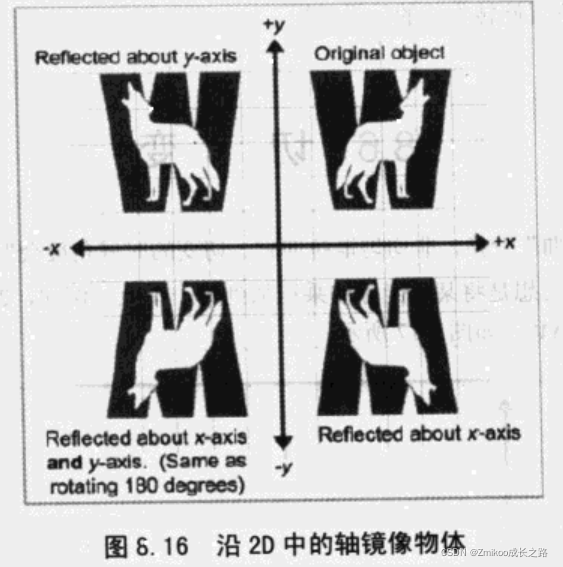
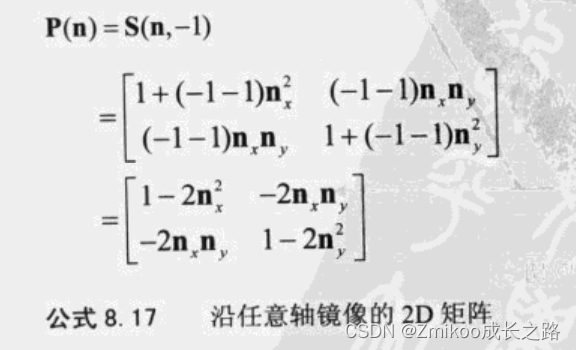
镜像
镜像(也叫作反射)是一种变换,其作用是将物体沿直线(2D中)或平面(3D中)“翻折”。
使缩放因子为-1能够很容易地实现镜像变换。设
n
⃗
\vec n
n为2D单位向量,下列矩阵将沿通过原点且垂直于
n
⃗
\vec n
n的反射轴来进行镜像变换。
3D中,用反射平面代替直线。下列矩阵将沿通过原点且垂直于n的平面来进行镜像变换:

注意一个物体只能“镜像”一次,如果再次镜像(当沿不同的轴或平面的时候),物体将翻回“正面”(用一张纸来想象),这和在原位置旋转物体的效果一样。
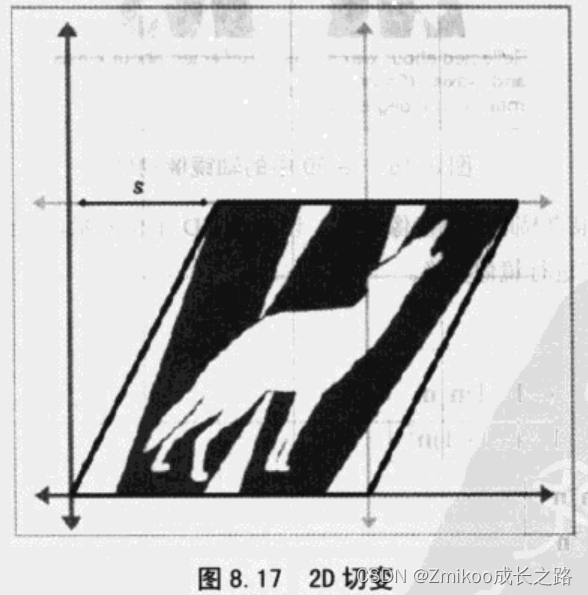
切变
切变是一种坐标系“扭曲”变换,非均匀地拉伸它。切变的时候角度会发生变化,但是面积和体积却保持不变。基本思想是将某一坐标的乘积加到另一个上。例如,2D中,将y乘以某个因子然后加到x上,得到
X
′
=
x
+
s
y
X'=x+sy
X′=x+sy。如图8.17所示。
3D中的切变方法是取出一个坐标,乘以不同因子再加到其他两个坐标上。记法
H
x
y
H_xy
Hxy的意义是
x
,
y
x,y
x,y坐标被坐标
z
z
z改变。
切变是一种很少用到的变换,它也被称作扭曲变换。包含切变与缩放(均匀或非均匀)的变换通常很容易与包含旋转与非均匀缩放(只能是非均匀)的变换发生混淆。
变换的组合
变换分类
当讨论一般意义上的变换时,我们将使用类似的术语:映射或函数。在最一般的意义上,映射就是一种简单的规则,接收输入,产生输出。我们把从a到b的F映射记作 F ( a ) = b F(a)=b F(a)=b。
线性变换
如果满足下式,那么映射
F
(
a
)
F(a)
F(a)就是线性的:
F
(
a
+
b
)
=
F
(
a
)
+
F
(
b
)
F(a+b)=F(a)+F(b)
F(a+b)=F(a)+F(b)
F
(
k
a
)
=
k
F
(
a
)
F(ka)=kF(a)
F(ka)=kF(a)
线性变换的重要引理:
- 映射 F ( a ) = a M F(a)=aM F(a)=aM,当 M M M为任意方阵时,说映射是一个线性变换。
- F ( a + b ) = ( a + b ) M = a M + b M = F ( a ) + F ( b ) F(a+b)=(a+b)M=aM+bM=F(a)+F(b) F(a+b)=(a+b)M=aM+bM=F(a)+F(b)
- F ( k a ) = ( k a ) M = k ( a M ) = k F ( a ) F(ka)=(ka)M=k(aM)=kF(a) F(ka)=(ka)M=k(aM)=kF(a)
在某些文献中,线性变换的定义是平行线变换后仍然是平行线。大多数情况下它是对的,但有一个小小的例外:投影(当一条直线投影后变成一个点,能认为这个点平行于什么﹖)除了这点理论上的例外,这种定义是正确的。线性变换可能造成“拉伸”,但直线不会“弯折”,所以平行线仍然保持平行。
仿射变换
仿射变换是指线性变换后接着平移。因此,任何线性变换都是仿射变换,但不是所有仿射变换都是线性变换。
任何具有形式
v
′
=
v
M
+
b
v'= vM+b
v′=vM+b 的变换都是仿射变换。
可逆变换
如果存在一个逆变换可以“撤消”原变换,那么该变换是可逆的。即:如果存在逆变换
F
−
1
F^{-1}
F−1,使得
F
−
1
(
F
(
a
)
)
=
a
F^{-1}(F(a)) = a
F−1(F(a))=a,对于任意a,映射
F
(
a
)
F(a)
F(a)是可逆的。
一个仿射变换就是一个线性变换加上平移,显然,可以用相反的量“撤消”平移部分。所以问题变为一个线性变换是否可逆。
因为任意线性变换都能表达为矩阵,所以求逆变换等价于求矩阵的逆,如果矩阵是奇异的,则变换不可逆;可逆矩阵的行列式不为零。
除了投影以外,其他变换都能“撤消”。当物体被投影时,某一维有用的信息被抛弃了,而这些信息是不可能恢复的。因此,所有基本变换除了投影都是可逆的。
等角变换
如果变换前后两向量夹角的大小和方向都不改变,该变换是等角的。只有平移,旋转和均匀缩放是等角变换。等角变换将会保持比例不变。需要注意的是:镜像并不是等角变换,因为尽管两向量夹角的大小不变,但夹角的方向改变了。所有等角变换都是仿射和可逆的。
正交变换
“正交”用来描述具有某种性质的矩阵,正交变换的基本思想是轴保持互相垂直,而且不进行缩放变换。正交变换很容易求出它的逆。
平移、旋转和镜像是仅有的正交变换。长度、角度、面积和体积都保持不变。(尽管如此,但因为镜像变换被认为是正交变换,所以一定要密切注意角度、面积和体积的准确定义)。
正交矩阵的行列式为±1。
所有正交矩阵都是仿射和可逆的。
刚体变换
刚体变换只改变物体的位置和方向,不包括形状。所有长度、角度、面积和体积都不变。平移和旋转是仅有的刚体变换,镜像并不被认为是刚体变换。
刚体变换也被称作正规变换。所有刚体变换都是正交、等角、可逆和仿射的。
某些刚体变换旋转矩阵的行列式为1。
变换类型小结
















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









