






用NoMachine连接小车进入工控机内部,
在路径/Home/okagv2020/install/share/cartographer_ros/configuration_files/下找到backpack_2d_navigation.lua:
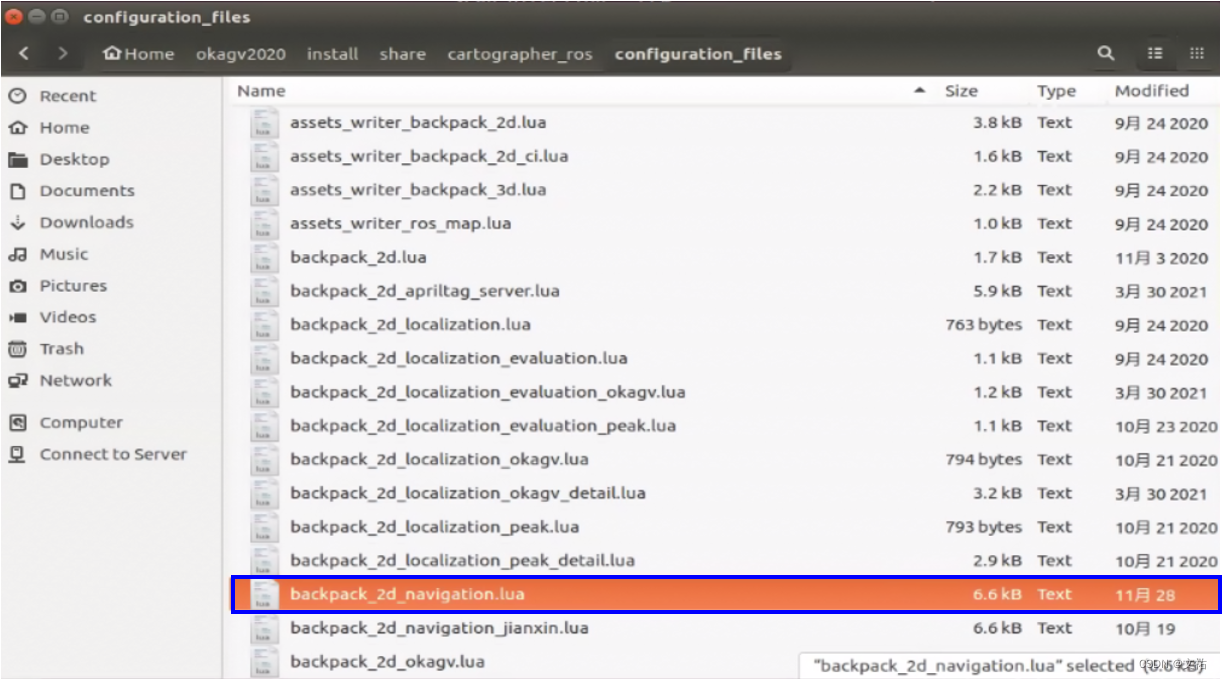
修改地图匹配得分参数MAP_BUILDER.pose_graph.constraint_builder.min_score = 0.4 --0.55即可。

指导人:深圳市欧铠智能机器人股份有限公司丁工















02-16
 4238
4238
4238
01-13
1431
1431
06-30
643
643
11-18
1739
1739
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









