






当现场地图环境变化比较大时,要更新pbstream文件以使小车能准确匹配地图,下面给出更新步骤。
用网线连接小车,进入NoMachine,关闭下面这个终端
打开一个终端,输入命令“ rosservice call /update_trajectory " ”, 按Tab键(注意trajectory后面有个英文双引号),即可看到全部命令行:
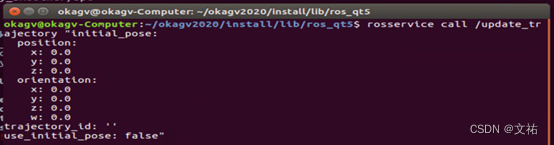
将trajectory_id参数改为实际项目的代号,这个例子中项目是332,将use_initial_pose参数改为true,按回车:
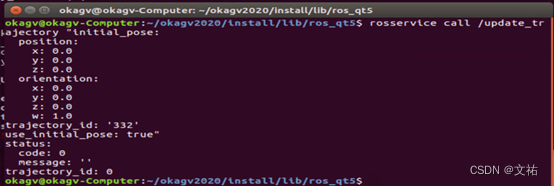
用手柄控制小车绕着需要更新的区域行走一圈,结束后按Ctrl+C组合键停止更新:

最后将生成的332update.pbstream复制一份到/okagv/map路径下,再复制一份到~/okagv/map/update路径下重启小车即可使用更新后的pbstream。















 549
549











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









