






问题1:
正常运行的凸轮程序,偶尔有挂上了同步,但从轴不运行的情况。
问题原因:凸轮点位的dA给了额外值。
解决办法:将所有点位的dA写0,即程序自行运行加速度。不由外部给定。
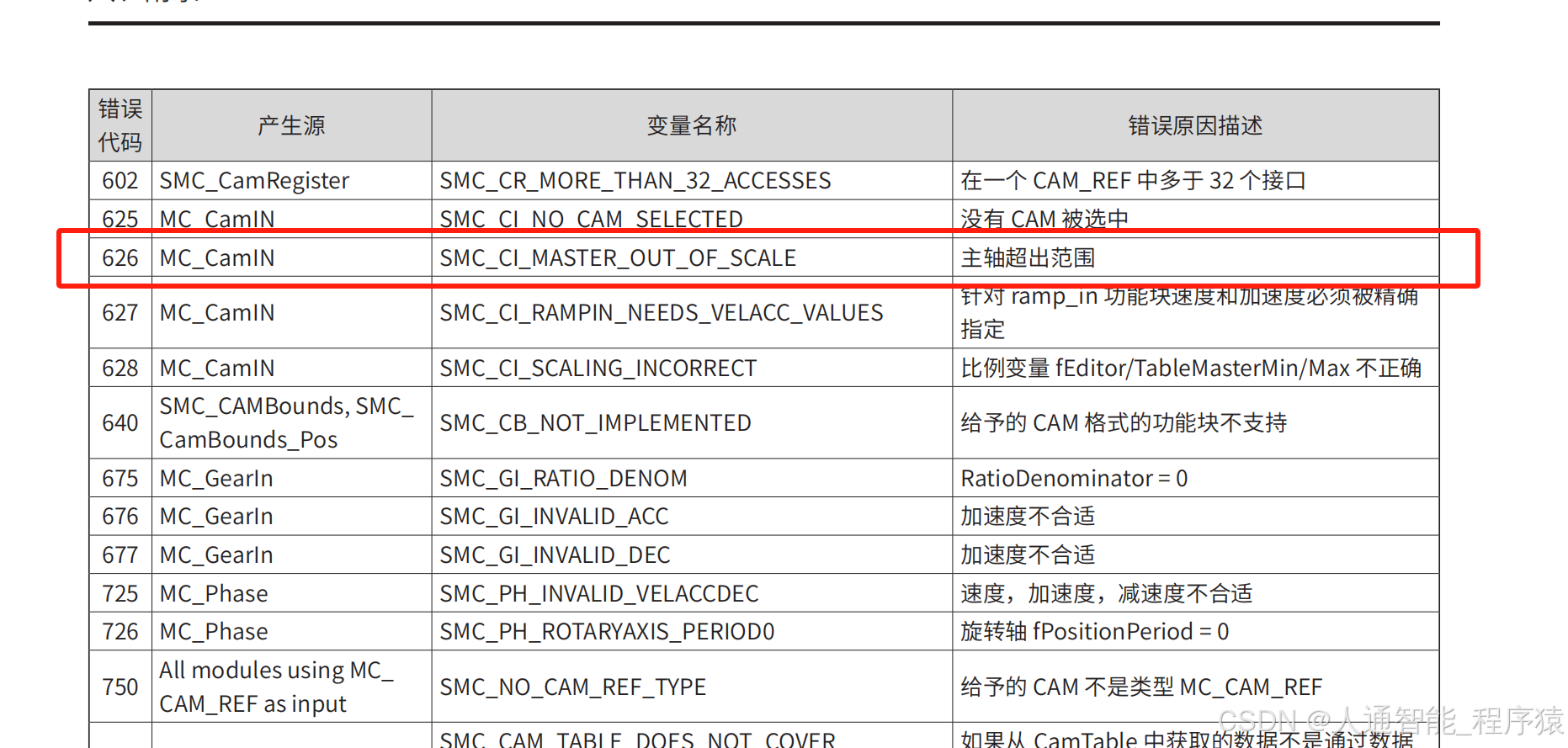
问题2:
使用凸轮曲线类型为直线时,凸轮无法挂上,报SMC_CI_SCALING_INCORRECT
该问题通常是数据错误导致的。
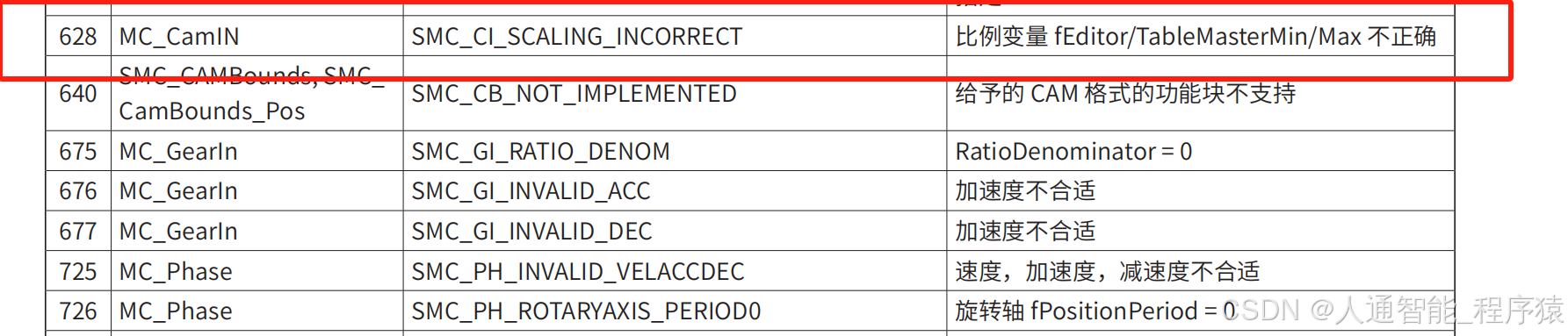
解决办法:
将传入凸轮中未用到的点位,全部改成最后一个使用的点位。
例如
凸轮点数组定义为10
实际仅使用到下标4的点位
则后面的5-10的点位数据=下标4的点位即可。
问题3:
MC_Cam_TableSelect 执行选择时报错

解决办法:查找凸轮所有点位,是否有存在。主轴点是否有大于xEnd点位的情况
问题4:
MC_Cam_TableSelect 执行选择时报错
解决办法:查找凸轮所有点位,是否有存在点位为空的情况

















 548
548

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









