







应用需求:
再实际控制中,主轴往一个方向运动,从轴来回运动。希望的是再电子凸轮耦合过程中,凸轮曲线以主轴的模态位置坐参考,从轴以绝对位置做参考,本文演示其实现方式。
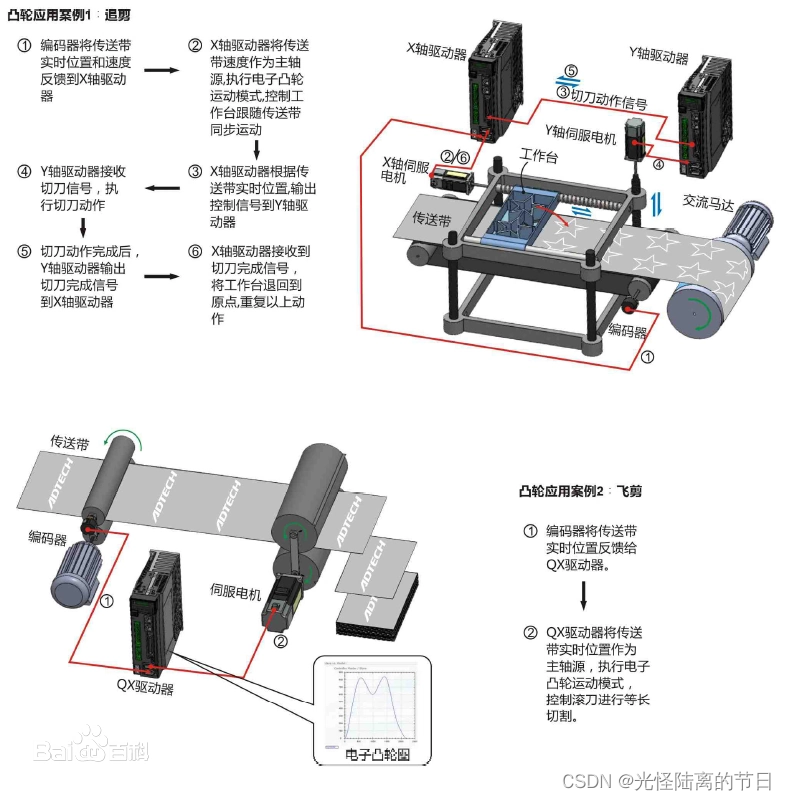
电子凸轮(英文简称ECAM)是利用构造的凸轮曲线来模拟机械凸轮,以达到机械凸轮系统相同的凸轮轴与主轴之间相对运动的软件系统。
系统组成编辑 播报
电子凸轮和系统采用旋变作为位置传感器,可以通过通讯端口和PC或手持编程器(Handy terminal)进行通信。PC和手持编程器提供给用户编程使用,为用户提供了方便的编程界面。信号输出采用并行(PIO)和串行(SIO)两种方式,输出信号可以直接用来控制伺服电机和步进电机的驱动器,也可以通过控制器将信号集中处理后控制变频器等驱动装置,实现运动控制的目的。
输出设置编辑 播报
电子凸轮的输出是以DOG为单位进行设置的。一个DOG分为DOG WIDTH和DOG INTERVAL两部分,DOGWIDTH相当于机械凸轮中开关被压下并保持的时间或角度范围,需设置一个起始角度(Start position)ON和一个终止角度(End position)OFF。相应的DOGINTERVAL就是相当于开关松开的角度范围。对于一个凸轮来讲,可以有多个DOG,通常只需设置DOG WIDTH,DOG Interval就是在两个DOG WIDTH中间的角度范围,不需另外设置。一般可以设定的DOG数和SENSOR的转速有关,转速越高,可以设定的DOG就越少,相反转速越低,可设定DOG数

 订阅专栏 解锁全文
订阅专栏 解锁全文
















06-13
 603
603
603
05-12
08-09
3262
3262
08-25
1362
1362
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











