







DCDC BUCK各种模式:
1、PWM、PFM、PWM+PFM
2、CCM、DCM、BCM、FCCM
3、电压控制,电流控制、COT、FOT、滞环控制
不同分类方法:
一、频率变化:
1、从属于PWM的“真”定频模式
a、电压模式(Voltage Mode,VM)、平均电流模式(Average Current Mode,ACM)
b、峰值电流模式(Peak Current Mode,PCM)
c、谷值电流模式(Valley Current Mode,VCM)
2、自适应计时器的“伪”定频模式
d、恒定导通时间(Constant On-time,COT),其下分为电压谷值模式和电流谷值模式
e、恒定关断时间(Constant Off-time,FOT),其下分为电压峰值模式和电流峰值模式
3、基于比较的变频模式(PFM)
f、电压滞环Bang-Bang模式
g、电流滞环Bang-Bang模式
二、控制模式:
1、电压(需要较复杂的相位补偿电路设计)
2、电流(时间上属于电压控制模式的改良,反馈环路分为电压环路和电流环路)
3、滞环(纹波控制)(针对需要更高速的负载瞬态响应,如CPU、FPGA等电源,)包含了COT和TI的D-CAP等,COT模式一大优点—DCM和CCM的无缝切换
三、电感电流模式
1、CCM
2、DCM
3、BCM
4、FCCM(有时又称FPWM,用于低负载下降低纹波用,但是会增加功耗,输出部分既可以输出电流也可以吸收电流)
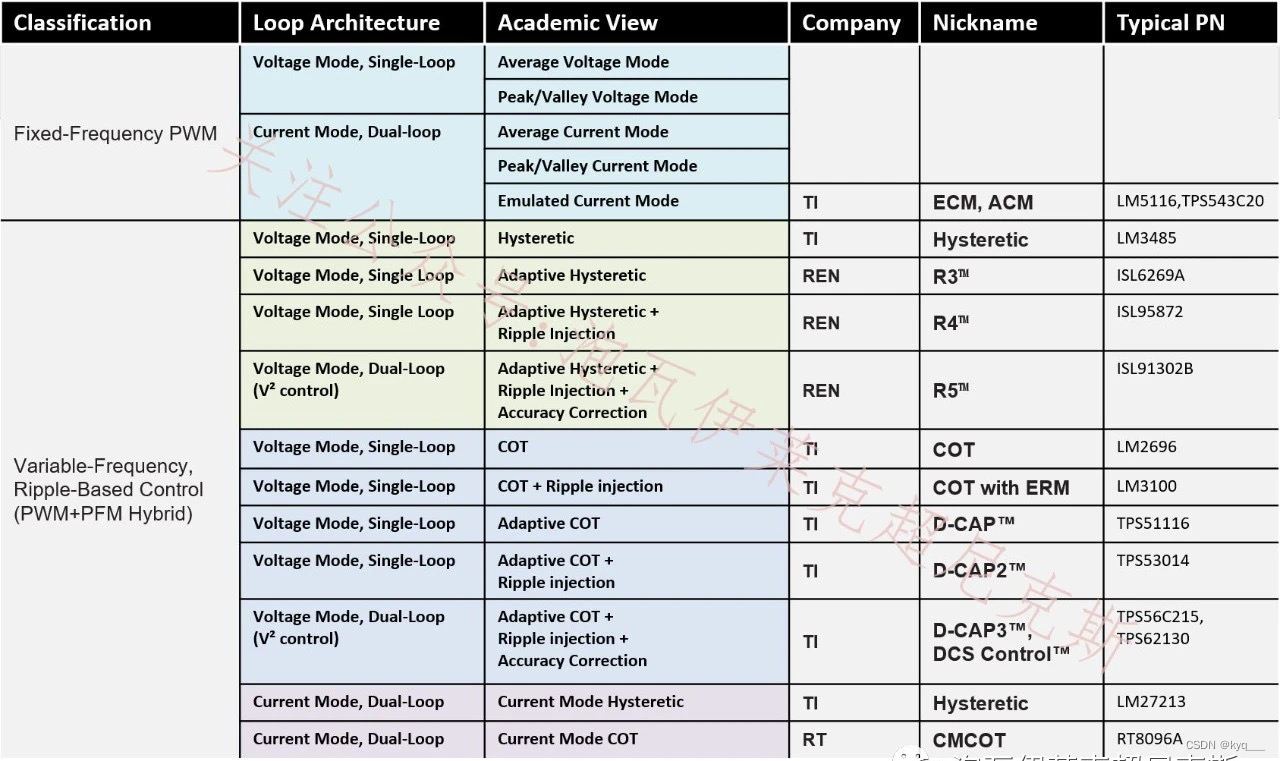
四、实际Buck芯片模式
五、PWM波形
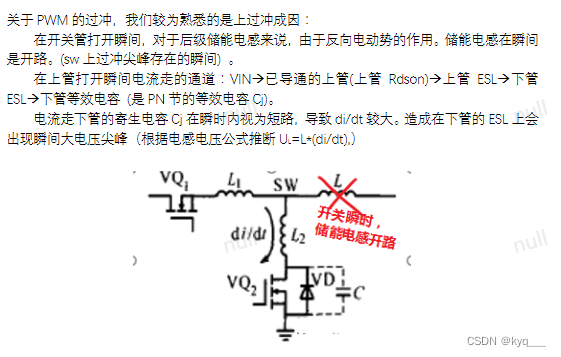
1、上过冲:
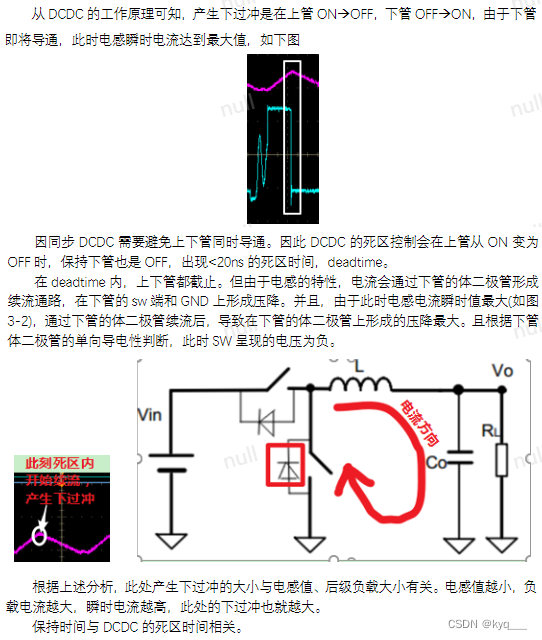
2、下过冲:
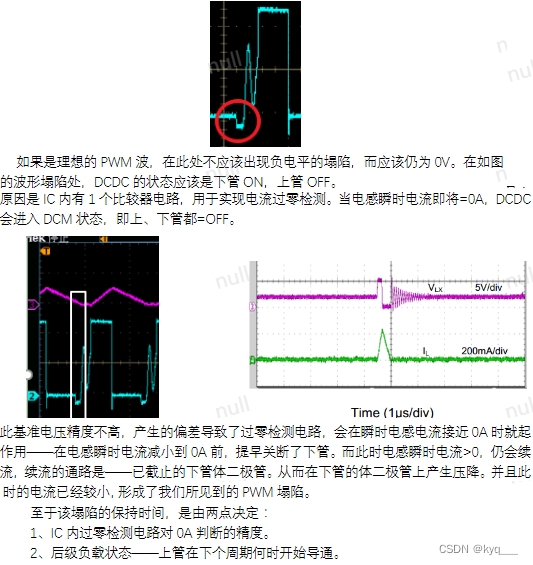
3、前塌陷
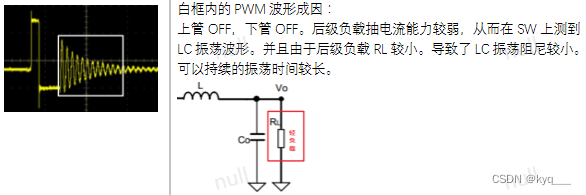
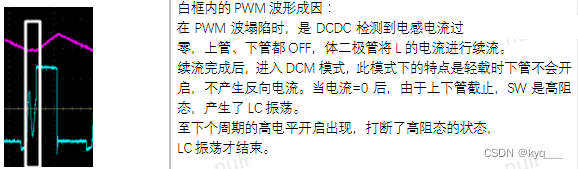
4、轻载振荡

5、波前振荡















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









