







开篇的话:OK,这部分我们到了高级OpenGL,哇!终于看到高级部分了,心里还有点开心。
深度测试
在坐标系统小节中,我们渲染了一个3D箱子,并且运用了深度缓冲(Depth Buffer)来防止被阻挡的面渲染到其它面的前面。在这一节中,我们将会更加深入地讨论这些储存在深度缓冲(或z缓冲(z-buffer))中的深度值(Depth Value),以及它们是如何确定一个片段是处于其它片段后方的。
深度缓冲就像颜色缓冲(Color Buffer)(储存所有的片段颜色:视觉输出)一样,在每个片段中储存了信息,并且(通常)和颜色缓冲有着一样的宽度和高度。深度缓冲是由窗口系统自动创建的,它会以16、24或32位float的形式储存它的深度值。在大部分的系统中,深度缓冲的精度都是24位的。
当深度测试(Depth Testing)被启用的时候,OpenGL会将一个片段的的深度值与深度缓冲的内容进行对比。OpenGL会执行一个深度测试,如果这个测试通过了的话,深度缓冲将会更新为新的深度值。如果深度测试失败了,片段将会被丢弃。
深度缓冲是在片段着色器运行之后在屏幕空间中运行的。
屏幕空间坐标与通过OpenGL的glViewport所定义的视口密切相关,并且可以直接使用GLSL内建变量gl_FragCoord从片段着色器中直接访问。gl_FragCoord的x和y分量代表了片段的屏幕空间坐标(其中(0, 0)位于左下角)。gl_FragCoord中也包含了一个z分量,它包含了片段真正的深度值。z值就是需要与深度缓冲内容所对比的那个值。
深度测试默认是禁用的,所以如果要启用深度测试的话,我们需要用GL_DEPTH_TEST选项来启用它:
glEnable(GL_DEPTH_TEST);当它启用的时候,如果一个片段通过了深度测试的话,OpenGL会在深度缓冲中储存该片段的z值;如果没有通过深度缓冲,则会丢弃该片段。如果你启用了深度缓冲,你还应该在每个渲染迭代之前使用GL_DEPTH_BUFFER_BIT来清除深度缓冲,否则你会仍在使用上一次渲染迭代中的写入的深度值:
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);可以想象,在某些情况下你会需要对所有片段都执行深度测试并丢弃相应的片段,但不希望更新深度缓冲。意思就是说,你在使用一个只读的(Read-only)深度缓冲。OpenGL允许我们禁用深度缓冲的写入,只需要设置它的深度掩码(Depth Mask)设置为GL_FALSE就可以了:
glDepthMask(GL_FALSE);深度测试函数
OpenGL允许我们修改深度测试中使用的比较运算符。这允许我们来控制OpenGL什么时候该通过或丢弃一个片段,什么时候去更新深度缓冲。我们可以调用glDepthFunc函数来设置比较运算符(或者说深度函数(Depth Function)):
glDepthFunc(GL_LESS);这个函数接受下面表格中的比较运算符:
| 函数 | 描述 |
|---|---|
| GL_ALWAYS | 永远通过深度测试 |
| GL_NEVER | 永远不通过深度测试 |
| GL_LESS | 在片段深度值小于缓冲的深度值时通过测试 |
| GL_EQUAL | 在片段深度值等于缓冲区的深度值时通过测试 |
| GL_LEQUAL | 在片段深度值小于等于缓冲区的深度值时通过测试 |
| GL_GREATER | 在片段深度值大于缓冲区的深度值时通过测试 |
| GL_NOTEQUAL | 在片段深度值不等于缓冲区的深度值时通过测试 |
| GL_GEQUAL | 在片段深度值大于等于缓冲区的深度值时通过测试 |
默认情况下使用的深度函数是GL_LESS,它将会丢弃深度值大于等于当前深度缓冲值的所有片段。
我们将深度函数改为GL_ALWAYS:

深度测试将会永远通过,所以最后绘制的片段将会总是会渲染在之前绘制片段的上面,即使之前绘制的片段本就应该渲染在最前面。
将它重新设置为GL_LESS,这会将场景还原为原有的样子:

深度值精度
深度缓冲包含了一个介于0.0和1.0之间的深度值,它将会与观察者视角所看见的场景中所有物体的z值进行比较。观察空间的z值可能是投影平截头体的近平面(Near)和远平面(Far)之间的任何值。我们需要一种方式来将这些观察空间的z值变换到[0, 1]范围之间,其中的一种方式就是将它们线性变换到[0, 1]范围之间。下面这个(线性)方程将z值变换到了0.0到1.0之间的深度值:

这里的nearnear和farfar值是我们之前提供给投影矩阵设置可视平截头体的那个 near 和 far 值。这个方程需要平截头体中的一个z值,并将它变换到了[0, 1]的范围中。z值和对应的深度值之间的关系可以在下图中看到:
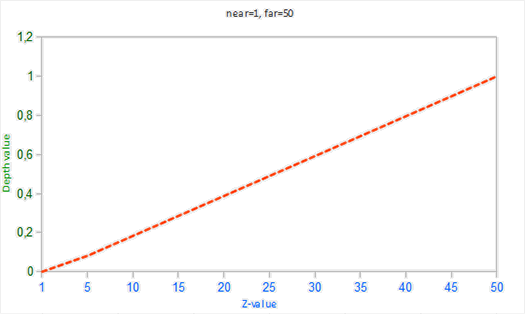
注意所有的方程都会将非常近的物体的深度值设置为接近0.0的值,而当物体非常接近远平面的时候,它的深度值会非常接近1.0。
然而,在实践中是几乎永远不会使用这样的线性深度缓冲(Linear Depth Buffer)的。要想有正确的投影性质,需要使用一个非线性的深度方程,它是与 1/z 成正比的。它做的就是在z值很小的时候提供非常高的精度,而在z值很远的时候提供更少的精度。

深度缓冲中的值在屏幕空间中不是线性的(在透视矩阵应用之前在观察空间中是线性的)。深度缓冲中0.5的值并不代表着物体的z值是位于平截头体的中间了,这个顶点的z值实际上非常接近近平面!你可以在下图中看到z值和最终的深度缓冲值之间的非线性关系:
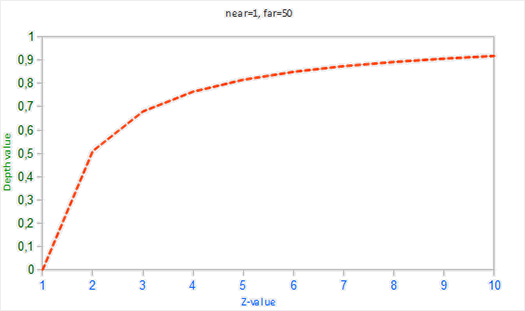
深度值很大一部分是由很小的z值所决定的,这给了近处的物体很大的深度精度。这个(从观察者的视角)变换z值的方程是嵌入在投影矩阵中的,所以当我们想将一个顶点坐标从
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









