






目录
资料下载地址:基于STM32的超声波测距测温proteus仿真
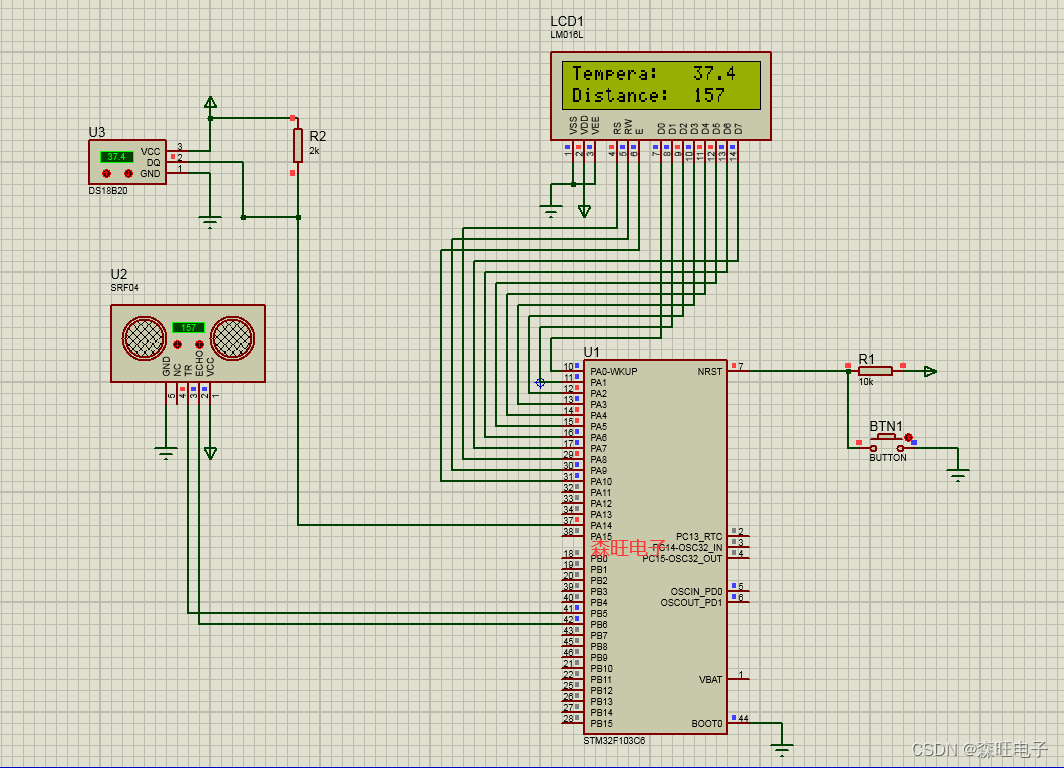
一、项目功能
1、HC-SR04测距,1602液晶上显示
2、DS18B20测温,1602液晶上显示
二、仿真
三、代码
超声波采集程序
#include "timer.h"
#include "led.h"
TIM_HandleTypeDef TIM3_Handler; //定时器句柄
u16 msHcCount = 0;//ms计数
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim);
void TIM3_Init(u16 arr,u16 psc)
{
TIM3_Handler.Instance=TIM3; //通用定时器3
TIM3_Handler.Init.Prescaler=psc; //分频系数
TIM3_Handler.Init.CounterMode=TIM_COUNTERMODE_UP; //向上计数器
TIM3_Handler.Init.Period=arr; //自动装载值
TIM3_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;//时钟分频因子
HAL_TIM_Base_Init(&TIM3_Handler);
HAL_TIM_Base_Start_IT(&TIM3_Handler); //使能定时器3和定时器3更新中断:TIM_IT_UPDATE
HAL_TIM_Base_MspInit(&TIM3_Handler);
}
//定时器底册驱动,开启时钟,设置中断优先级
//此函数会被HAL_TIM_Base_Init()函数调用
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)
{
__HAL_RCC_TIM3_CLK_ENABLE(); //使能TIM3时钟
HAL_NVIC_SetPriority(TIM3_IRQn,1,3); //设置中断优先级,抢占优先级1,子优先级3
HAL_NVIC_EnableIRQ(TIM3_IRQn); //开启ITM3中断
}
}
//定时器3中断服务函数
void TIM3_IRQHandler(void)
{
msHcCount++;
HAL_TIM_IRQHandler(&TIM3_Handler);
}
//回调函数,定时器中断服务函数调用
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&TIM3_Handler))
{
}
}
void SRF04_init(void)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_Initure.Pin=GPIO_PIN_5;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP;
GPIO_Initure.Pull=GPIO_PULLUP;
GPIO_Initure.Speed=GPIO_SPEED_HIGH;
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
GPIO_Initure.Pin=GPIO_PIN_6;
GPIO_Initure.Mode=GPIO_MODE_INPUT;
GPIO_Initure.Pull=GPIO_NOPULL;
GPIO_Initure.Speed=GPIO_SPEED_HIGH;
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
}
void Delay_Ms(uint16_t time) //延时函数
{
uint16_t i,j;
for(i=0;i<time;i++)
for(j=0;j<10260;j++);
}
/*:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
** 函数名称: Delay_Ms_Us
** 功能描述: 延时1us (可通过仿真来判断他的准确度)
** 参数描述:time (us) 注意time<65535
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/
void Delay_Us(uint16_t time) //延时函数
{
uint16_t i,j;
for(i=0;i<time;i++)
for(j=0;j<9;j++);
}
//获取定时器时间
u32 GetEchoTimer(void)
{
u32 t = 0;
t = msHcCount*1000;//得到MS
msHcCount = 0;
t += TIM3->CNT;//得到US
TIM3->CNT = 0; //将TIM2计数寄存器的计数值清零
Delay_Ms(50);
return t;
}
//一次获取超声波测距数据 两次测距之间需要相隔一段时间,隔断回响信号
//为了消除余震的影响,取五次数据的平均值进行加权滤波。
float Hcsr04GetLength(void )
{
u32 t = 0;
int i = 0;
float lengthTemp = 0;
float sum = 0;
while(i<2)
{
TRIG_Send(1); //发送口高电平输出
Delay_Us(100);
TRIG_Send(0);
while(ECHO_Reci == 0); //等待接收口高电平输出
HAL_TIM_Base_Start_IT(&TIM3_Handler); //打开定时器
i = i + 1;
while(ECHO_Reci == 1);
HAL_TIM_IRQHandler(&TIM3_Handler);
HAL_TIM_Base_Stop_IT(&TIM3_Handler); //关闭定时器
t = GetEchoTimer(); //获取时间,分辨率为1US
lengthTemp = ((float)t/51.5);//cm
sum = lengthTemp + sum ;
}
lengthTemp = sum/2.0;
return lengthTemp;
}
四、资料


















 1567
1567











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











