







本文编辑:@调皮连续波,保持关注调皮哥,获得更多学习内容和建议!
各位大佬好,我是调皮哥,感谢大家的关注。
因为疫情,有的人回不了学校的实验室,因此早在先前我就想为大家采集一些数据,提供给大家做算法分析和验证。
正好,昨天为别人采数据,就多采集了一些。数据放在这里我也没有用,因此就准备分享给大家。具体的雷达参数配置在文件中有说明,数据总共有30个bin文件,有单人、双人的,还增加了男女生、呼吸快慢速进行对比。
文件名如下:
(单人数据全部为成年男性)
one_1.5m_slow_1.bin:单人 1.5米 慢速呼吸 第1组数据
one_1.5m_slow_2.bin:单人 1.5米 慢速呼吸 第2组数据
one_1.5m_slow_3.bin:单人 1.5米 慢速呼吸 第3组数据
one_1.5m_slow_4.bin:单人 1.5米 慢速呼吸 第4组数据
one_1.5m_slow_5.bin:单人 1.5米 慢速呼吸 第5组数据
one_1.5m_common_1.bin :单人 1.5米 正常呼吸 第1组数据
one_1.5m_common_2.bin :单人 1.5米 正常呼吸 第2组数据
one_1.5m_common_3.bin :单人 1.5米 正常呼吸 第3组数据
one_1.5m_common_4.bin :单人 1.5米 正常呼吸 第4组数据
one_1.5m_common_5.bin :单人 1.5米 正常呼吸 第5组数据
one_1.5m_fast_1.bin :单人 1.5米 快速呼吸 第1组数据
one_1.5m_fast_2.bin :单人 1.5米 快速呼吸 第2组数据
one_1.5m_fast_3.bin :单人 1.5米 快速呼吸 第3组数据
one_1.5m_fast_4.bin :单人 1.5米 快速呼吸 第4组数据
one_1.5m_fast_5.bin :单人 1.5米 快速呼吸 第5组数据
one_1m_slow_1.bin:单人 1米 慢速呼吸 第1组数据
one_1m_slow_2.bin:单人 1米 慢速呼吸 第2组数据
one_1m_slow_3.bin:单人 1米 慢速呼吸 第3组数据
one_1m_slow_4.bin:单人 1米 慢速呼吸 第4组数据
one_1m_slow_5.bin:单人 1米 慢速呼吸 第5组数据
one_2m_common_1.bin:单人2米 正常呼吸 第1组数据
one_2m_common_2.bin:单人2米 正常呼吸 第2组数据
one_2m_common_3.bin:单人2米 正常呼吸 第3组数据
one_2m_common_4.bin:单人2米 正常呼吸 第4组数据
one_2m_common_5.bin:单人2米 正常呼吸 第5组数据
(双人数据,两人面向雷达,左边为成年男性,右边为成年女性)
two_1.5m_common_1.bin:双人1.5米 正常呼吸 第1组数据
two_1.5m_common_2.bin:双人1.5米 正常呼吸 第2组数据
two_1.5m_common_3.bin:双人1.5米 正常呼吸 第3组数据
two_1.5m_common_4.bin:双人1.5米 正常呼吸 第4组数据
two_1.5m_common_5.bin:双人1.5米 正常呼吸 第5组数据
注意:
单人数据雷达配置为单发模式(1T4R),双人数据雷达配置为两发模式(2T4R),每次51.2秒(共1024帧),两种模式的雷达参数都一致,只是在2T4R中采用了两个发射天线,仅此而已。
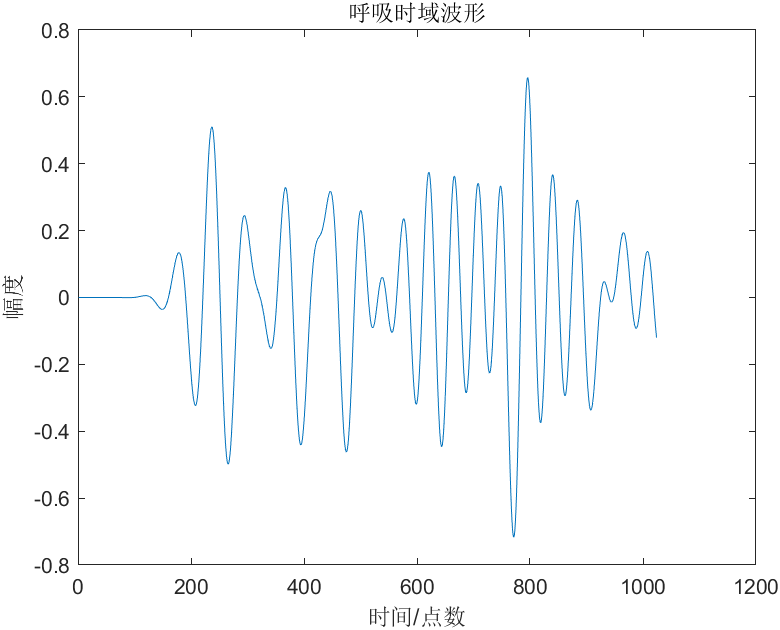
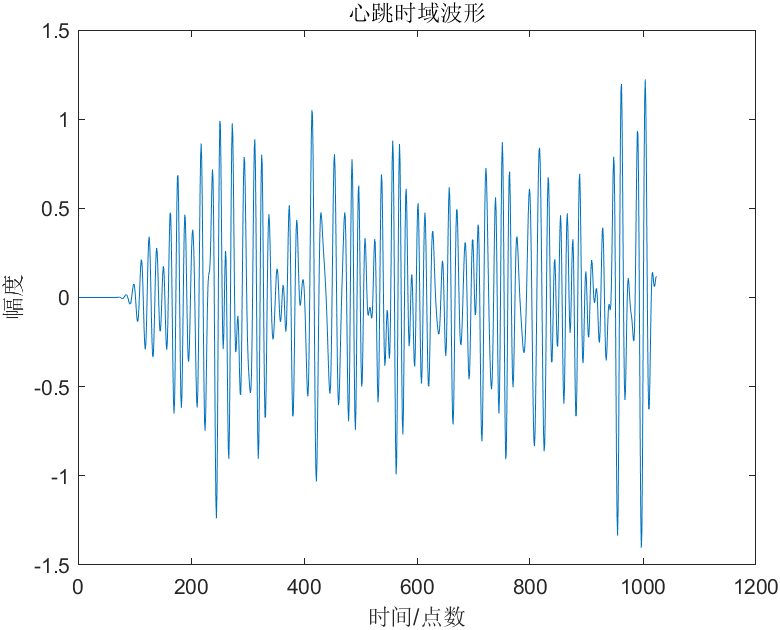
同时,也提供了一个MATLAB Demo程序用于解析数据,关于呼吸心跳的原理可以参考下文:干货 | IWR1642EVM呼吸心跳原始数据采集与仿真分析(含MATLAB代码和数据)。解析后的结果,要优于上述文章,同时也修正了一些之前的错误。
呼吸心跳波形示例:
资料获取方式点击:代码和数据


















 927
927

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











