






本文编辑 | 调皮哥的小助理
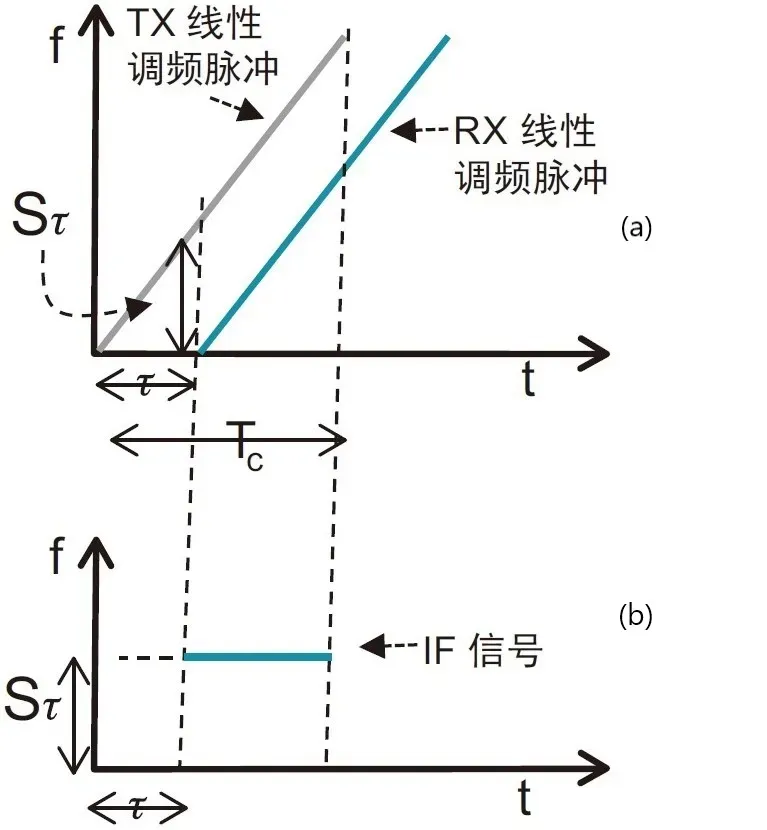
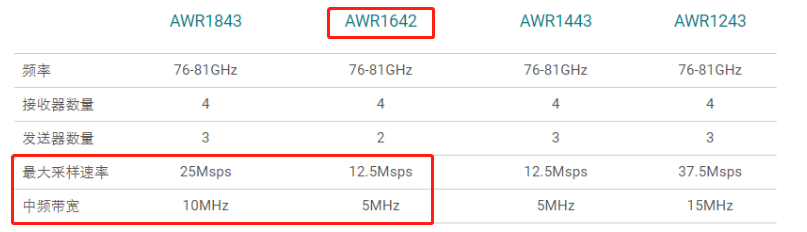
AWR1642因为最大中频带宽 固定只有5MHz,最大中频带宽是发射信号与回波信号混频之后得到的最大中频频率,即代表着最大的回波延迟时间。
因此根据雷达方程和目标最大探测距离公式,如下所示:
复采样(IQ):
R max = min [ P t G t G r λ 2 σ ( 4 π ) 3 ⋅ S N R min ⋅ N F ⋅ k T 0 β n ⋅ G S P L S P 4 f s T c C 2 B ] R_{\max }=\min \left[\sqrt[4]{\frac{P_t G_t G_r \lambda^2 \sigma}{(4 \pi)^3 \cdot S N R_{\min } \cdot N F \cdot k T_0 \beta_n} \cdot \frac{G_{S P}}{L_{S P}}} \frac{f_s T_{\mathrm{c}} \mathrm{C}}{2 B}\right] Rmax=min[4(4π)3⋅SNRmin⋅NF⋅kT0βnPtGtGrλ2σ⋅LSPGSP2BfsTcC]
实采样:
R max = min [ P t G i G r λ 2 σ ( 4 π ) 3 ⋅ S N R min ⋅ N F ⋅ k T 0 β n ⋅ G S P L S P 4 , f s T c C 4 B ] R_{\max }=\min \left[\sqrt[4]{\frac{P_t G_i G_r \lambda^2 \sigma}{(4 \pi)^3 \cdot S N R_{\min } \cdot N F \cdot k T_0 \beta_n} \cdot \frac{G_{S P}}{L_{S P}}}, \frac{f_s T_{\mathrm{c}} \mathrm{C}}{4 B}\right] Rmax=min[4(4π)3⋅SNRmin⋅NF⋅kT0βnPtGiGrλ2σ⋅LSPGSP,4BfsTcC]
其中,min{.}前面部分是FMCW体制的雷达方程,后面部分是FMCW中频信号采样频率与探测距离的公式。公式中,Pt是发射功率,Gr是接收机增益,Gt是发射机增益,λ是发射信号波长,σ是目标雷达横截面积,SNRmin是雷达目标的最小可检测信噪比,NF是接收机噪声系数,k是玻尔兹曼常数,T0是开氏温度,βn近似于发射信号有效带宽B。
Gsp是信号处理增益,Lsp是信号处理损耗,对于 FMCW 雷达, 主要来自“快时间”和“慢时间”的 DFT,通过距离-多普勒处理,总信号处理增益Gsp =10*log( M x N) ,其中 N 是“快时间”上的 DFT 大小,M 是“慢时间”上的 DFT 大小,它们也分别称为距离和多普勒单元的个数。
当然,雷达方程的形式很多,不一定只采用上面这种表达方法。
为了实现更大的探测距离,我们一般选择复采样,也就是正交采样,得到IQ两路信号。但是根据TI的ADC参数,AWR1642的最高实采样率为12.5Msps。
而且在Complex 1x采样模式下,最高采样率为6.25Msps,采样率设置超过这个值mmWave studio会报错,因此最高中频带宽为0.96.25MHz。在Complex 2x采样模式,最高采样率为12.5Msps,因此最高中频带宽为0.912.5/2MHz。见原文如下:

Complex 2x模式,IF频谱的虚部和实部均被滤波并传输到ADC,因此如果采样率为X,则ADC数据将包括从**-X/2到X/2的频谱**。在Complex 1x模式下,仅实部的IF频谱被滤波并发送到ADC,因此如果采样率为X,ADC数据将包括从0到X的频谱。
实际上,在Complex 2x模式下,即使采样率上去了,但是得到的频谱也会简单,相对于Complex 1x模式,最远探测距离还是不变的。也就是说,无论是实采样的12.5Msps,Complex 1x模式或Complex 2x模式,最远探测距离推到极致,最高中频带宽都是5MHz。
因此,雷达的最远探测距离除了由雷达方程决定之外,还由最高中频带宽决定,可以用下列公式表示:
Range max = I F max × C 2 × S _{\max }=\frac{\mathrm{IF}_{\max } \times \mathrm{C}}{2 \times \mathrm{S}} max=2×SIFmax×C
因此,最高中频带宽上不去,想要增加雷达探测距离就只能降低调频斜率S,这是我们大家都知晓的一个方法。假设想要探测最远距离Rmax = 50m,那么需要设置的S=15MHz/us;Rmax =100m,则S=7.5MHz/us。但是问题是,S不可能无限小,因为太小了反而发射信号的有效带宽低,目标的距离分辨力就很弱了。值得注意的是,最开始的雷达最远探测距离不应该带入采样率fs,因为采样率决定不了最远探测距离。
另外,AWR1642其实不适合远距离的目标检测,行人不过50m,汽车不超过80m,不然效果就会大打折扣。AWR1843具备25MHz的最大中频带宽,因此在相同参数下探测距离是AWR1642的5倍。
下面是一些实测效果。
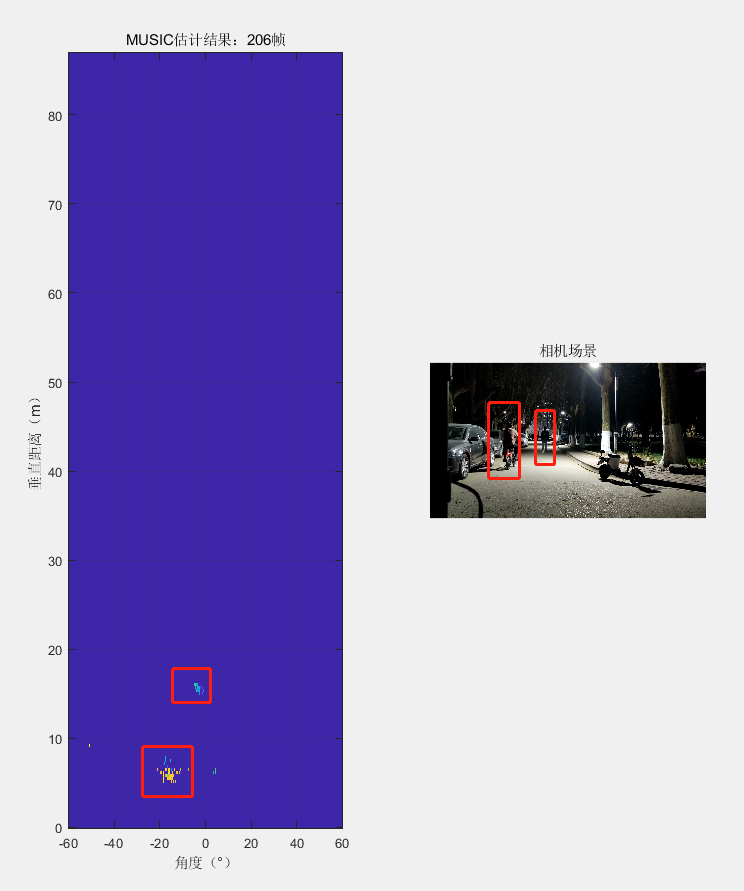
(1)行人+自行车
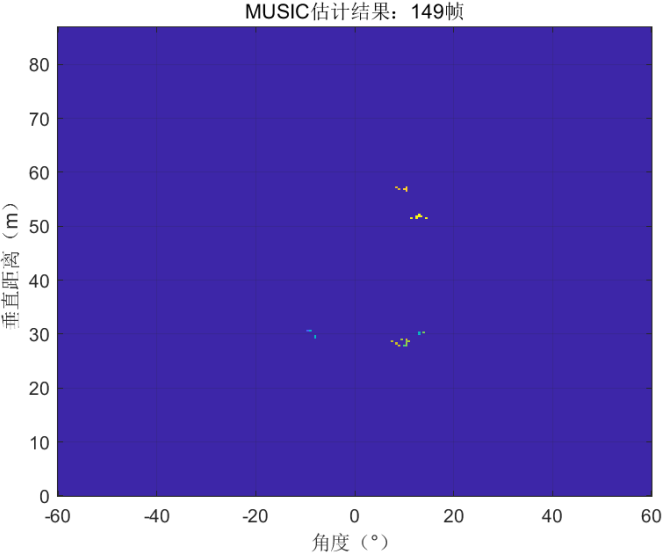
最终通过MUSIC得到的结果如下图所示,其中近距离的点云数量还是比较多的,同时也存在多径效应,点云数量随着距离增加而减少。
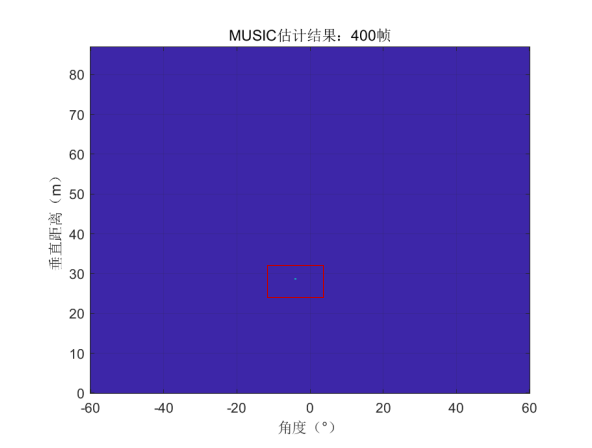
(2)行人

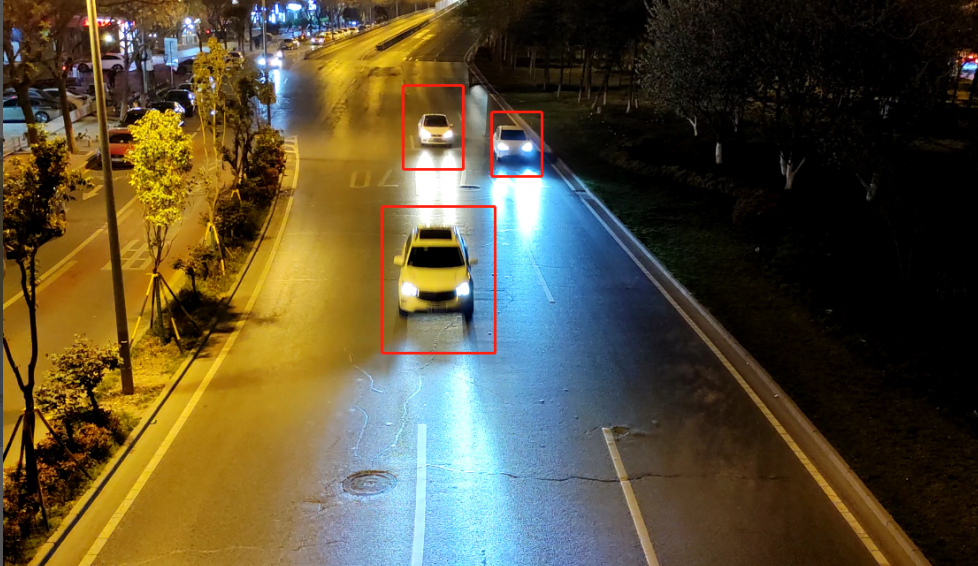
(3)汽车
一个行人+自行车的完整视频:
查看完整版视频请点击:AWR1642毫米波雷达实测行人、自行车和汽车等目标
经过目前的设计,AWR1642其实还有很多提高的地方,官方提供的demo开发板实在太局限。比如可以在天线的布局上优化一下,FOV只需要在120°以内,可以适当稀疏布阵,加上TDM-MIMO虚拟孔径和超分辨算法,可以进一步提高测角性能,具体能够到达多少,要理论加上实践推算一下。















 165
165











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











