









论文解读:(TransA)TransA: An Adaptive Approach for Knowledge Graph Embedding
先前的知识表示方法(TransE、TransH、TransR、TransD、TranSparse等)的损失函数仅单纯的考虑到
h
+
r
h+r
h+r 和
t
t
t 在某个语义空间的欧式距离,认为只要欧式距离最小,就认为
h
h
h 和
t
t
t 的关系为
r
r
r 。显然这种度量标准过于简单,虽然先前的工作在得分函数上做出了不错的改进,但训练的损失函数制约了表示能力,因此,本文TransA模型的提出,主要对损失函数进行改进。
虽然TransA的提出是在TransD、TranSparse之前,但实践表明TransA的提出很有价值。
一、简要信息
| 序号 | 属性 | 值 |
|---|---|---|
| 1 | 模型名称 | TransA |
| 2 | 所属领域 | 自然语言处理 |
| 3 | 研究内容 | 知识表示 |
| 4 | 核心内容 | knowledge embedding |
| 5 | GitHub源码 | https://github.com/thunlp/KB2E |
| 6 | 论文PDF | https://arxiv.org/pdf/1509.05490.pdf) |
二、摘要与引言
知识表示在人工智能领域内是非常重要的任务,许多研究试图将知识库中的实体和关系表示为一个连续的向量。通过这些尝试,基于翻译模型的表示方法是通过最小化头实体到尾实体的损失函数。尽管这些策略非常成功,但其损失函数过于简单,不能够很好的表示复杂多变的知识图谱。为了解决这些问题,我们提出TransA,一种对表示向量的自适应度量方法。根据度量学习的想法提出一个更灵活的嵌入方法。实验在几个基线数据集上完成,我们的模型获得了最优效果。
最近研究均涉及到知识图谱,像问答系统等需要对图谱进行表示,现如今提出的方法有TransE、TransH等。然而这些方法的度量标准仅仅是实体之间的欧氏距离,过于简单的损失函数不能够处理复杂多变的图谱。
(1)由于缺乏灵活的损失函数,当前的翻译模型均是应用球形等位超平面,因此越靠近中心,实体对与对应关系的向量越相似。如图所示,这是TransE模型在FreeBase上训练的向量通过PCA降维得到的图:
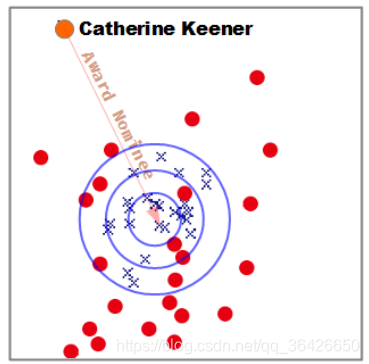
橘黄色的为头实体,橘黄色的线与箭头则为对应的关系向量。蓝色的叉表示正确的尾实体,红色的圆点则是错误的尾实体,可知当简单的使用欧式距离来评判,会掺和进大量错误的实体。由于图谱是复杂多变的,这一点很难避免。
(2)另外,由于过于简单的损失函数,使得当前几种翻译模型在对向量的每一个维度的训练处理方法相同。如图所示:
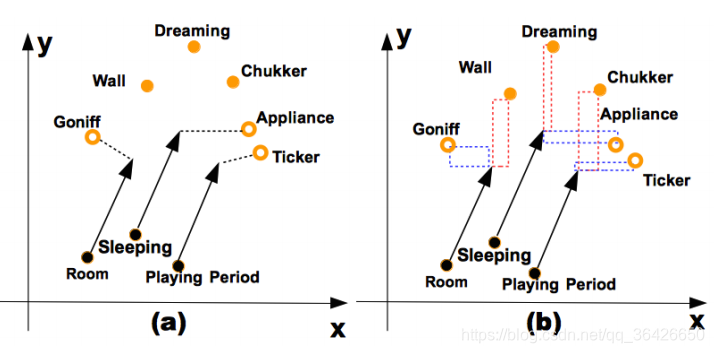
传统的方法采用欧氏距离度量实体对与关系向量的相似性(图(a)),假设这里向量只有两个维度
x
,
y
x,y
x,y ,度量方法则是对
x
x
x 和
y
y
y 一样。然而当错误的实体(橘黄色空心圆)比正确的实体(橘黄色实心圆)更接近头实体与关系的和向量
h
+
r
h+r
h+r (黑色圆表示头实体,箭头表示关系),则会预测错误。但是如果分别对不同维度进行考虑,如图(b),降低
x
x
x 维度对度量的影响,提升
y
y
y 方向对度量的影响,就可以让正确的尾实体“距离”
h
+
r
h+r
h+r 更近。这种度量不是传统的欧氏距离,而是马氏距离。
三、相关工作与主要贡献
基于翻译模型:得分函数均为
f
r
(
h
,
t
)
=
∣
∣
h
r
+
r
−
t
r
∣
∣
2
2
f_r(h,t)=||h_r+r-t_r||_2^2
fr(h,t)=∣∣hr+r−tr∣∣22,但头尾实体的表示(语义空间)不同,分别如下:
(1)TransE:
h
r
=
h
h_r=h
hr=h,
t
r
=
t
t_r=t
tr=t;
(2)TransH:
h
r
=
h
−
w
r
T
h
w
r
h_r=h-w_r^{\mathbf{T}}hw_r
hr=h−wrThwr,
t
r
=
t
−
w
r
T
t
w
r
t_r=t-w_r^{\mathbf{T}}tw_r
tr=t−wrTtwr ;
(3)TransR:
h
r
=
M
r
h
h_r=M_rh
hr=Mrh,
t
r
=
M
r
t
t_r=M_rt
tr=Mrt ;
(4)TransD:
h
r
=
M
r
h
h
h_r=M_r^hh
hr=Mrhh,
h
r
=
M
r
t
t
h_r=M_r^tt
hr=Mrtt ;
其他方法:
(1)非结构(UM):与TransE相同,但所有关系
r
=
0
r=0
r=0 ;
(2)结构化(SE):得分函数定义为
f
r
(
h
,
t
)
=
∣
∣
M
h
,
r
h
−
M
t
,
r
t
∣
∣
2
2
f_r(h,t)=||M_{h,r}h-M_{t,r}t||_2^2
fr(h,t)=∣∣Mh,rh−Mt,rt∣∣22 ;
(3)单层神经网络(SLM):得分函数定义为
f
r
(
h
,
t
)
=
u
r
T
g
(
M
r
,
1
h
+
M
r
,
2
t
)
f_r(h,t) = u_r^{\mathbf{T}}g(M_{r,1}h+M_{r,2}t)
fr(h,t)=urTg(Mr,1h+Mr,2t) ;
(3)语义能量匹配(SME):头尾实体分别与关系向量在一个全连接神经网络中计算后,相互乘积。
四、算法模型详解(TransA)
4.1 自适应度量分值函数
作者认为传统的得分函数只是单纯的考虑向量之间的距离,对应超平面是一个球面,因此可能会将最近的错误的向量被预测为正确,因此提出一种新的得分函数为
f
r
(
h
,
t
)
=
(
∣
h
+
r
−
t
∣
)
T
W
r
(
∣
h
+
r
−
t
∣
)
f_r(h,t)=(|h+r-t|)^{\mathbf{T}}W_r(|h+r-t|)
fr(h,t)=(∣h+r−t∣)TWr(∣h+r−t∣) ,其中
∣
h
+
r
−
t
∣
=
(
∣
h
1
+
r
1
−
t
1
∣
,
∣
h
2
+
r
2
−
t
2
∣
,
.
.
.
)
|h+r-t|=(|h_1+r_1-t_1|,|h_2+r_2-t_2|,...)
∣h+r−t∣=(∣h1+r1−t1∣,∣h2+r2−t2∣,...),
W
r
W_r
Wr是关系
r
r
r 对应的非负加权矩阵。不同于传统的方法,得分函数使用绝对值,作者给出两方面的解释:
(1)一方面,只有在
W
r
W_r
Wr 的所有项都是非负的情况下,绝对值计算才能使分数函数成为一个定义良好的范数;
(2)另一方面,忽略几何学中正负的方向性在TransA的应用。如果得分函数存在负数,如果其对应的权重过大,则损失函数便降低,然而负数并不能说明
h
+
r
h+r
h+r 与
t
t
t 的距离更近。
4.2 椭球面
作者认为传统的方法是“球形等势面(Spherical Equipotential Surfaces)”的,何为球形等势面?由于传统的得分函数是欧式距离, h + r h+r h+r 向量与 t t t 向量存在一定的位移,当在训练过程中,一个 h h h 可能与若干个 t t t 存在 r r r 关系,因此 h + r h+r h+r 与 一定数量的 t t t 之间的应保持较近距离,为了将所有正确的 t t t 纳含进去,普通的得分函数就是在 h + r h+r h+r 处画一个球面(二维空间中就是一个圆),并将所有正确的包含进去。但在所有正确的 t t t 的范围内,总会存在错误的实体,因此保证查全率的情况下准确率非常低。如果选用 f r ( h , t ) = ( ∣ h + r − t ∣ ) T W r ( ∣ h + r − t ∣ ) f_r(h,t)=(|h+r-t|)^{\mathbf{T}}W_r(|h+r-t|) fr(h,t)=(∣h+r−t∣)TWr(∣h+r−t∣) ,其对应的超平面由权重矩阵 W r W_r Wr 动态的控制,可能是一个球,也可能是压扁了的椭球,使得尽可能减少错误实体的条件下将所有正确的实体包含进去。
4.3 特征加权
那权重矩阵 W r W_r Wr 如何计算?作者使用 LDL分解,即: W r = L r T D r L r W_r=L_r^{\mathbf{T}}D_rL_r Wr=LrTDrLr , L r L_r Lr 是一种变换矩阵, D r = d i a g ( w 1 , w 2 , . . . ) D_r=diag(w_1,w_2,...) Dr=diag(w1,w2,...) 则是对角矩阵, w 1 , w 2 w_1,w_2 w1,w2 即为对应每个维度的权重。得分函数可写作: f r ( h , t ) = ( L r ∣ h + r − t ∣ ) T D r ( L r ∣ h + r − t ∣ ) f_r(h,t) = (L_r|h+r-t|)^{\mathbf{T}}D_r(L_r|h+r-t|) fr(h,t)=(Lr∣h+r−t∣)TDr(Lr∣h+r−t∣) 。
4.4 实现细节
采用距离排序损失函数,如图:
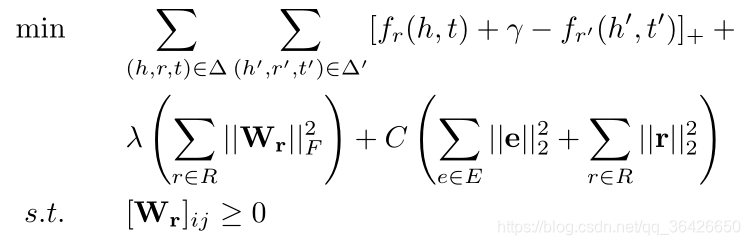
可采用拉格朗日求梯度进行最小化。


















 709
709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











