







🧠 向所有学习者致敬!
“学习不是装满一桶水,而是点燃一把火。” —— 叶芝
我的博客主页: https://lizheng.blog.csdn.net
🌐 欢迎点击加入AI人工智能社区!
🚀 让我们一起努力,共创AI未来! 🚀
引言:基于模型的强化学习
强化学习算法大致可以分为无模型和基于模型的方法。
- 无模型强化学习:像 Q-Learning、DQN、REINFORCE、A2C、PPO 这样的算法,都是通过与环境的试错交互直接学习。它们学习价值函数或策略时,并没有显式地构建环境动态(转移和奖励)的表示。
- 基于模型的强化学习:算法会学习一个环境的模型(近似转移函数 P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a) 和奖励函数 R ( s , a , s ′ ) R(s,a,s') R(s,a,s′)),基于经验进行学习。然后可以利用这个学到的模型进行规划——在模型中模拟交互,从而在不需要额外真实世界交互的情况下改进价值函数或策略。
Dyna-Q 是一个将无模型学习和基于模型的规划相结合的经典例子。
Dyna-Q 是什么?
Dyna-Q 是 Richard Sutton 提出的一种架构,它将直接强化学习(从真实经验中学习)与规划(从由学到的模型生成的模拟经验中学习)结合起来。它通过交替进行真实世界中的行动、从真实经验中学习(更新价值/策略和模型),以及使用学到的模型进行多次规划步骤来运行。
直接强化学习与规划
- 直接强化学习:代理在真实环境状态 s t s_t st 中采取行动 a t a_t at,观察到下一个状态 s t + 1 s_{t+1} st+1 和奖励 r t r_t rt。这个真实转换 ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1) 用于使用标准的无模型算法(例如 Q-Learning)更新代理的价值函数(例如,Q 表)。
- 模型学习:同样的真实转换 ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1) 也用于更新代理对环境的内部模型。在表格情况下,这通常意味着存储观察到的结果:模型 ( s t , a t ) → ( r t , s t + 1 ) (s_t, a_t) \rightarrow (r_t, s_{t+1}) (st,at)→(rt,st+1)。
- 规划:代理使用 模拟 经验进行
k
k
k 次额外的更新。在每个规划步骤中,它:
- 随机选择一个它之前经历过的状态 s s s 和行动 a a a。
- 咨询它的学到的模型,预测结果奖励 r r r 和下一个状态 s ′ s' s′: ( r , s ′ ) = 模型 ( s , a ) (r, s') = \text{模型}(s, a) (r,s′)=模型(s,a)。
- 使用这个模拟转换 ( s , a , r , s ′ ) (s, a, r, s') (s,a,r,s′) 应用相同的直接强化学习更新规则(例如,Q-Learning)来更新价值函数。
Dyna 架构
“Dyna”这个名字反映了这种动态的相互作用:真实经验直接改进模型和价值函数/策略,而模型则允许通过模拟进行规划步骤,间接通过模拟进一步改进价值函数/策略。
为什么选择 Dyna-Q?模型的价值
像 Dyna-Q 这样的基于模型的方法提供了显著的优势,主要在于样本效率:
- 数据效率:真实世界的交互可能代价高昂或速度缓慢。通过学习模型,代理可以从一次真实转换中生成许多模拟转换。这些模拟经验允许对价值函数或策略进行比仅使用直接强化学习更多的更新,从而实现更快的学习,减少真实世界的交互次数。
- 聚焦更新:规划步骤可以潜在地专注于状态-行动空间的重要部分,或者通过模拟轨迹更快地传播价值信息。
- 适应性:如果环境发生变化,模型可以被更新,从而允许规划过程快速调整策略(尽管基本的 Dyna-Q 更简单地通过 Dyna-Q+ 来解决这个问题)。
主要代价是需要学习和存储模型,以及规划步骤的计算开销。学到的策略的质量也取决于学到的模型的准确性。
Dyna-Q 的应用场景和方式
Dyna-Q 是一个基础且极具说明性的例子,适用于:
- 表格强化学习问题:具有离散状态和行动的环境,其中 Q 表和简单模型可以有效学习(例如,网格世界、简单迷宫)。
- 需要高样本效率的场景:当真实环境交互成本较高时。
- 教育目的:清晰地展示了将模型学习和规划相结合的概念。
尽管基本的 Dyna-Q 使用表格 Q-Learning 和简单的确定性模型,但 Dyna 架构可以扩展:
- 使用函数近似(神经网络)对价值函数/策略和模型进行学习(例如,Dyna-DQN)。
- 学习概率模型。
- 使用更复杂的规划算法(例如,蒙特卡洛树搜索)与学到的模型结合。
Dyna-Q 的数学基础
Dyna-Q 主要依赖于其底层组件的数学原理:用于直接强化学习和模型更新的 Q-Learning,以及在规划期间应用的 Q-Learning 更新规则。
Q-Learning 回顾(直接强化学习部分)
代理维护一个行动价值函数
Q
(
s
,
a
)
Q(s, a)
Q(s,a),表示从状态
s
s
s 开始,采取行动
a
a
a,并按照当前策略继续下去的预期回报。对于一个 真实 转换
(
s
t
,
a
t
,
r
t
,
s
t
+
1
)
(s_t, a_t, r_t, s_{t+1})
(st,at,rt,st+1),Q 值使用 TD 误差进行更新:
Q
(
s
t
,
a
t
)
←
Q
(
s
t
,
a
t
)
+
α
[
r
t
+
γ
max
a
′
Q
(
s
t
+
1
,
a
′
)
−
Q
(
s
t
,
a
t
)
]
Q(s_t, a_t) \leftarrow Q(s_t, a_t) + \alpha \left[ r_t + \gamma \max_{a'} Q(s_{t+1}, a') - Q(s_t, a_t) \right]
Q(st,at)←Q(st,at)+α[rt+γa′maxQ(st+1,a′)−Q(st,at)]
其中
α
\alpha
α 是学习率,
γ
\gamma
γ 是折扣因子。
模型学习(表格情况)
模型
模型
(
s
,
a
)
\text{模型}(s, a)
模型(s,a) 存储在状态
s
s
s 中采取行动
a
a
a 的观察结果。对于确定性环境,在观察到
(
s
t
,
a
t
,
r
t
,
s
t
+
1
)
(s_t, a_t, r_t, s_{t+1})
(st,at,rt,st+1) 后,模型更新为:
模型
(
s
t
,
a
t
)
←
(
r
t
,
s
t
+
1
)
\text{模型}(s_t, a_t) \leftarrow (r_t, s_{t+1})
模型(st,at)←(rt,st+1)
这通常存储在一个字典或哈希映射中,其中键是
(
状态
,
行动
)
(\text{状态}, \text{行动})
(状态,行动) 对。
规划(模拟经验更新)
在每个规划步骤中,代理:
- 从之前观察到的对中选择一个状态-行动对 ( s p , a p ) (s_p, a_p) (sp,ap)。
- 从模型中检索模拟结果: ( r p , s p ′ ) = 模型 ( s p , a p ) (r_p, s'_p) = \text{模型}(s_p, a_p) (rp,sp′)=模型(sp,ap)。
- 使用这个 模拟 转换对
Q
(
s
p
,
a
p
)
Q(s_p, a_p)
Q(sp,ap) 应用 Q-Learning 更新:
Q ( s p , a p ) ← Q ( s p , a p ) + α [ r p + γ max a ′ Q ( s p ′ , a ′ ) − Q ( s p , a p ) ] Q(s_p, a_p) \leftarrow Q(s_p, a_p) + \alpha \left[ r_p + \gamma \max_{a'} Q(s'_p, a') - Q(s_p, a_p) \right] Q(sp,ap)←Q(sp,ap)+α[rp+γa′maxQ(sp′,a′)−Q(sp,ap)]
这允许基于学到的模型传播价值信息,而无需与真实环境交互。
Dyna-Q 的逐步解释
- 初始化:Q 表 Q ( s , a ) Q(s, a) Q(s,a)(例如,初始化为零),模型 模型 ( s , a ) \text{模型}(s, a) 模型(s,a)(为空)。超参数 α , γ , ϵ \alpha, \gamma, \epsilon α,γ,ϵ,规划步骤 k k k。
- 每个剧集循环:
a. 从环境中获取初始状态 s s s。
b. 每个剧集步骤循环:
i. 使用基于 Q Q Q 的策略(例如, ϵ \epsilon ϵ-贪婪)从状态 s s s 中选择行动 a a a。
ii. 采取行动 a a a,观察真实奖励 r r r 和下一个状态 s ′ s' s′。
iii. 直接强化学习更新:使用真实转换 ( s , a , r , s ′ ) (s, a, r, s') (s,a,r,s′) 通过 Q-Learning 规则更新 Q ( s , a ) Q(s, a) Q(s,a)。
iv. 模型更新:存储观察到的转换: 模型 ( s , a ) ← ( r , s ′ ) \text{模型}(s, a) \leftarrow (r, s') 模型(s,a)←(r,s′)。如果需要采样,将 ( s , a ) (s,a) (s,a) 添加到观察到的对列表中。
v. 规划:重复 k k k 次:
1. 从 之前观察到的 对中随机采样一个状态 s p s_p sp 和行动 a p a_p ap。
2. 从模型中获取模拟结果: ( r p , s p ′ ) = 模型 ( s p , a p ) (r_p, s'_p) = \text{模型}(s_p, a_p) (rp,sp′)=模型(sp,ap)。
3. 使用 ( s p , a p , r p , s p ′ ) (s_p, a_p, r_p, s'_p) (sp,ap,rp,sp′) 对 Q ( s p , a p ) Q(s_p, a_p) Q(sp,ap) 应用 Q-Learning 更新。
vi. 更新状态: s ← s ′ s \leftarrow s' s←s′。
vii. 如果 s ′ s' s′ 是终止状态,则退出剧集步骤循环。 - 重复:直到收敛或达到最大剧集数。
Dyna-Q 的关键组成部分
行动价值函数(Q 表)
- 存储在每个状态下采取每个行动的估计价值。
- 在表格情况下,通常是一个字典或多维数组。
- 通过直接强化学习和规划步骤进行更新。
环境模型(学到的)
- 存储学到的动态(转移和奖励)。
- 在表格 Dyna-Q 中,通常是一个字典,将 ( 状态 , 行动 ) (\text{状态}, \text{行动}) (状态,行动) 元组映射到 ( 奖励 , 下一个状态 ) (\text{奖励}, \text{下一个状态}) (奖励,下一个状态) 元组。
- 仅从真实环境交互中更新。
直接强化学习更新
- 基于在环境中实际经历的转换更新 Q 表(例如,Q-Learning)。
规划更新(基于模型)
- 基于通过查询学到的模型生成的模拟转换更新 Q 表。
- 在每个真实步骤后执行 k k k 次。
探索与利用
- 通过基于 Q 表的策略在真实交互中处理(例如, ϵ \epsilon ϵ-贪婪)。
- 规划步骤通常直接使用学到的 Q 值进行更新(在模型内利用当前价值估计)。
规划步骤数量( k k k)
- 一个关键的超参数,控制规划与直接交互的相对量。 k = 0 k=0 k=0 恢复为无模型的 Q-Learning。较大的 k k k 会增加计算成本,但如果模型准确,则可以显著加快学习速度。
超参数
- 学习率 ( α \alpha α),折扣因子 ( γ \gamma γ),探索率 ( ϵ \epsilon ϵ)。
- 规划步骤数量 ( k k k)。
实际示例:自定义网格世界
为什么选择网格世界来展示 Dyna-Q?
网格世界非常适合展示 Dyna-Q,因为:
- 离散状态/行动:适合 Dyna-Q 所使用的 Q 函数和模型的表格表示。
- 简单性:动态过程易于理解和学习,可以专注于 Dyna-Q 机制本身。
- 确定性(可选):确定性版本可以让模型快速变得完全准确,清楚地展示规划的好处。这里我们使用确定性版本。
- 可视化:Q 值、模型和策略可以轻松可视化。
环境描述:(与之前相同,使用元组状态)
- 网格大小:10x10。
- 状态:代理的 ( 行 , 列 ) (\text{行}, \text{列}) (行,列) 元组。
- 行动:4 个离散值(0:上,1:下,2:左,3:右)。
- 起点:(0, 0),终点:(9, 9)。
- 奖励:+10(终点),-1(墙壁),-0.1(步进)。
- 终止条件:到达终点或达到最大步数。
设置环境
导入必要的库。我们只需要基本的 Python 数据结构和 numpy/matplotlib。
# 导入必要的库
import numpy as np
import matplotlib.pyplot as plt
import random
from collections import defaultdict # 适用于 Q 表和模型
from typing import Tuple, Dict, Any, List, DefaultDict
# 设置随机种子以确保可重复性
seed = 42
random.seed(seed)
np.random.seed(seed)
%matplotlib inline
创建自定义环境
使用 GridEnvironmentTabular 类,稍作修改以直接返回状态元组,适用于表格方法。
class GridEnvironmentTabular:
"""
返回状态元组的网格世界,适用于表格方法。
奖励:+10(终点),-1(墙壁),-0.1(步进)。
"""
def __init__(self, rows: int = 10, cols: int = 10) -> None:
self.rows: int = rows
self.cols: int = cols
self.start_state: Tuple[int, int] = (0, 0)
self.goal_state: Tuple[int, int] = (rows - 1, cols - 1)
self.state: Tuple[int, int] = self.start_state
self.action_dim: int = 4
self.action_map: Dict[int, Tuple[int, int]] = {0: (-1, 0), 1: (1, 0), 2: (0, -1), 3: (0, 1)}
def reset(self) -> Tuple[int, int]:
""" 重置环境,返回状态元组。 """
self.state = self.start_state
return self.state
def step(self, action: int) -> Tuple[Tuple[int, int], float, bool]:
"""
执行一步,返回 (下一个状态元组, 奖励, 是否完成)。
"""
if self.state == self.goal_state:
return self.state, 0.0, True
dr, dc = self.action_map[action]
current_row, current_col = self.state
next_row, next_col = current_row + dr, current_col + dc
reward: float = -0.1
if not (0 <= next_row < self.rows and 0 <= next_col < self.cols):
next_row, next_col = current_row, current_col # 保持原位
reward = -1.0
self.state = (next_row, next_col)
next_state_tuple = self.state
done: bool = (self.state == self.goal_state)
if done:
reward = 10.0
return next_state_tuple, reward, done
def get_action_space_size(self) -> int:
return self.action_dim
实例化并测试环境。
custom_env_tabular = GridEnvironmentTabular(rows=10, cols=10)
n_actions_tabular = custom_env_tabular.get_action_space_size()
print(f"表格网格环境:")
print(f"大小:{custom_env_tabular.rows}x{custom_env_tabular.cols}")
print(f"行动维度:{n_actions_tabular}")
start_state_tuple = custom_env_tabular.reset()
print(f"起始状态:{start_state_tuple}")
next_s, r, d = custom_env_tabular.step(3) # 向右移动
print(f"步骤结果(行动=右):下一个状态={next_s},奖励={r},完成={d}")
表格网格环境:
大小:10x10
行动维度:4
起始状态:(0, 0)
步骤结果(行动=右):下一个状态=(0, 1),奖励=-0.1,完成=False
实现 Dyna-Q 算法
我们将使用函数实现 Dyna-Q,或者为了结构化,可以选择将其放在一个代理类中。
表示 Q 表和模型
defaultdict 非常适合 Q 表(未访问的状态-行动对返回 0)和模型。
# 初始化 Q 表和模型
# Q 表:将 (状态元组, 行动) 映射到 Q 值
Q_table: DefaultDict[Tuple[Tuple[int, int], int], float] = defaultdict(float)
# 模型:将 (状态元组, 行动) 映射到 (奖励, 下一个状态元组)
Model: Dict[Tuple[Tuple[int, int], int], Tuple[float, Tuple[int, int]]] = {}
# 跟踪观察到的状态-行动对,以便规划采样
Observed_State_Actions: List[Tuple[Tuple[int, int], int]] = []
行动选择( ϵ \epsilon ϵ-贪婪)
基于 Q 表的标准 ϵ \epsilon ϵ-贪婪选择。
def choose_action_epsilon_greedy(state: Tuple[int, int],
q_table: DefaultDict[Tuple[Tuple[int, int], int], float],
epsilon: float,
n_actions: int) -> int:
"""
根据 Q 表使用 $\epsilon$-贪婪策略选择行动。
参数:
- state (Tuple[int, int]): 当前状态元组。
- q_table (DefaultDict): 当前 Q 值估计。
- epsilon (float): 选择随机行动的概率。
- n_actions (int): 可能行动的总数。
返回:
- int: 选择的行动索引。
"""
if random.random() < epsilon:
# 探索:选择一个随机行动
return random.randrange(n_actions)
else:
# 利用:根据 Q 值选择最佳行动
q_values = [q_table[(state, a)] for a in range(n_actions)]
max_q = max(q_values)
# 处理平局情况,随机选择最佳行动之一
best_actions = [a for a, q in enumerate(q_values) if q == max_q]
return random.choice(best_actions)
直接强化学习更新(Q-Learning)
对 Q 表执行 Q-Learning 更新。
def q_learning_update(q_table: DefaultDict[Tuple[Tuple[int, int], int], float],
state: Tuple[int, int],
action: int,
reward: float,
next_state: Tuple[int, int],
alpha: float,
gamma: float,
n_actions: int,
is_done: bool) -> None:
"""
执行单次 Q-Learning 更新步骤。
参数:
- q_table: 要更新的 Q 表。
- state, action, reward, next_state, is_done: 转换元素。
- alpha: 学习率。
- gamma: 折扣因子。
- n_actions: 行动数量。
"""
# 获取当前 Q 值
current_q = q_table[(state, action)]
# 获取下一个状态的最大 Q 值(目标)
if is_done:
target_q = 0.0 # 如果剧集结束,则没有未来奖励
else:
next_q_values = [q_table[(next_state, a)] for a in range(n_actions)]
max_next_q = max(next_q_values) if next_q_values else 0.0
target_q = max_next_q
# 计算 TD 目标和 TD 误差
td_target = reward + gamma * target_q
td_error = td_target - current_q
# 更新 Q 值
new_q = current_q + alpha * td_error
q_table[(state, action)] = new_q
模型更新
使用观察到的转换更新学到的模型。
def update_model(model: Dict[Tuple[Tuple[int, int], int], Tuple[float, Tuple[int, int]]],
observed_pairs: List[Tuple[Tuple[int, int], int]],
state: Tuple[int, int],
action: int,
reward: float,
next_state: Tuple[int, int]) -> None:
"""
更新确定性表格模型。
参数:
- model: 模型字典。
- observed_pairs: 跟踪观察到的 (状态, 行动) 对。
- state, action, reward, next_state: 转换元素。
"""
state_action = (state, action)
# 存储观察到的结果
model[state_action] = (reward, next_state)
# 如果尚未存在,则将对添加到观察到的对列表中(用于规划采样)
# 使用集合进行高效检查可能更适合大型状态空间,
# 但在这里使用列表更简单。
if state_action not in observed_pairs:
observed_pairs.append(state_action)
规划步骤函数
执行 k k k 次规划更新,使用模型。
def planning_steps(k: int,
q_table: DefaultDict[Tuple[Tuple[int, int], int], float],
model: Dict[Tuple[Tuple[int, int], int], Tuple[float, Tuple[int, int]]],
observed_pairs: List[Tuple[Tuple[int, int], int]],
alpha: float,
gamma: float,
n_actions: int) -> None:
"""
执行 $k$ 次规划步骤,使用学到的模型。
参数:
- k: 规划步骤数量。
- q_table, model, observed_pairs: 代理的组成部分。
- alpha, gamma, n_actions: 超参数。
"""
if not observed_pairs: # 如果没有观察到任何对,则无法进行规划
return
for _ in range(k):
# 从之前观察到的对中随机采样一个状态-行动对
state_p, action_p = random.choice(observed_pairs)
# 从模型中获取模拟的奖励和下一个状态
reward_p, next_state_p = model[(state_p, action_p)]
# 使用模拟经验对 Q 表执行 Q-Learning 更新
# 注意:模拟的下一个状态可能不是终止状态,因此 is_done 为 False
# 在更复杂的模型/环境中,模型可能还会预测终止。
q_learning_update(q_table, state_p, action_p, reward_p, next_state_p,
alpha, gamma, n_actions, is_done=False)
Dyna-Q 代理类(可选结构)
我们可以将这些组件组合到一个类中,以便更好地组织,类似于用于基于网络的代理的结构。
class DynaQAgent:
""" 封装 Dyna-Q 算法的组成部分和逻辑。 """
def __init__(self, n_actions: int,
alpha: float, gamma: float, epsilon: float,
planning_steps: int):
self.n_actions: int = n_actions
self.alpha: float = alpha
self.gamma: float = gamma
self.epsilon: float = epsilon
self.k: int = planning_steps
self.q_table: DefaultDict[Tuple[Tuple[int, int], int], float] = defaultdict(float)
self.model: Dict[Tuple[Tuple[int, int], int], Tuple[float, Tuple[int, int]]] = {}
self.observed_pairs: List[Tuple[Tuple[int, int], int]] = []
def choose_action(self, state: Tuple[int, int]) -> int:
""" 使用 $\epsilon$-贪婪选择行动。 """
return choose_action_epsilon_greedy(state, self.q_table, self.epsilon, self.n_actions)
def learn(self, state: Tuple[int, int], action: int, reward: float,
next_state: Tuple[int, int], done: bool) -> None:
"""
执行直接强化学习更新、模型更新和规划步骤。
"""
# 直接强化学习更新
q_learning_update(self.q_table, state, action, reward, next_state,
self.alpha, self.gamma, self.n_actions, done)
# 模型更新
update_model(self.model, self.observed_pairs, state, action, reward, next_state)
# 规划
planning_steps(self.k, self.q_table, self.model, self.observed_pairs,
self.alpha, self.gamma, self.n_actions)
def update_epsilon(self, new_epsilon: float) -> None:
""" 更新探索率。 """
self.epsilon = new_epsilon
运行 Dyna-Q 算法
设置超参数,初始化代理,并运行训练循环。
超参数设置
定义 Dyna-Q 的超参数。
# Dyna-Q 在自定义网格世界中的超参数
ALPHA = 0.1 # 学习率
GAMMA = 0.95 # 折扣因子
EPSILON_START = 1.0 # 初始探索率
EPSILON_END = 0.01 # 最终探索率
EPSILON_DECAY = 0.995 # 每个剧集的 $\epsilon$ 衰减因子
PLANNING_STEPS_K = 50 # 规划步骤数量 $k$
NUM_EPISODES_DYNAQ = 500 # 训练剧集数量
MAX_STEPS_PER_EPISODE_DYNAQ = 200 # 每个剧集的最大步数
初始化
初始化环境和 Dyna-Q 代理。
# 实例化环境
env_dynaq = GridEnvironmentTabular(rows=10, cols=10)
n_actions = env_dynaq.get_action_space_size()
# 初始化 Dyna-Q 代理
agent = DynaQAgent(n_actions=n_actions,
alpha=ALPHA,
gamma=GAMMA,
epsilon=EPSILON_START,
planning_steps=PLANNING_STEPS_K)
# 用于绘图的列表
dynaq_episode_rewards = []
dynaq_episode_lengths = []
dynaq_episode_epsilons = []
训练循环
Dyna-Q 训练循环交替执行行动、学习和规划。
print(f"开始 Dyna-Q 训练 ($k={PLANNING_STEPS_K}$)...")
# --- Dyna-Q 训练循环 ---
current_epsilon = EPSILON_START
for i_episode in range(1, NUM_EPISODES_DYNAQ + 1):
state: Tuple[int, int] = env_dynaq.reset()
episode_reward: float = 0.0
agent.update_epsilon(current_epsilon) # 为代理设置当前 $\epsilon$
for t in range(MAX_STEPS_PER_EPISODE_DYNAQ):
# 选择行动
action: int = agent.choose_action(state)
# 与环境交互
next_state, reward, done = env_dynaq.step(action)
# 学习(直接强化学习、模型更新、规划)
agent.learn(state, action, reward, next_state, done)
state = next_state
episode_reward += reward
if done:
break
# --- 剧集结束 ---
dynaq_episode_rewards.append(episode_reward)
dynaq_episode_lengths.append(t + 1)
dynaq_episode_epsilons.append(current_epsilon)
# 衰减 $\epsilon$
current_epsilon = max(EPSILON_END, current_epsilon * EPSILON_DECAY)
# 打印进度
if i_episode % 50 == 0:
avg_reward = np.mean(dynaq_episode_rewards[-50:])
avg_length = np.mean(dynaq_episode_lengths[-50:])
print(f"Epsilon {i_episode}/{NUM_EPISODES_DYNAQ} | 最近 50 个Epsilon的平均奖励:{avg_reward:.2f} | 平均长度:{avg_length:.1f} | $\epsilon$:{current_epsilon:.3f}")
print("网格世界训练完成 (Dyna-Q)。")
开始 Dyna-Q 训练 ($k=50$)...
Epsilon 50/500 | 最近 50 个 Epsilon的平均奖励:-15.37 | 平均长度:130.0 | $\epsilon$:0.778
Epsilon 100/500 | 最近 50 个Epsilon的平均奖励:1.82 | 平均长度:51.7 | $\epsilon$:0.606
Epsilon 150/500 | 最近 50 个Epsilon的平均奖励:4.09 | 平均长度:38.3 | $\epsilon$:0.471
Epsilon 200/500 | 最近 50 个Epsilon的平均奖励:5.81 | 平均长度:31.9 | $\epsilon$:0.367
Epsilon 250/500 | 最近 50 个Epsilon的平均奖励:6.50 | 平均长度:28.1 | $\epsilon$:0.286
Epsilon 300/500 | 最近 50 个Epsilon的平均奖励:7.26 | 平均长度:23.2 | $\epsilon$:0.222
Epsilon 350/500 | 最近 50 个Epsilon的平均奖励:7.53 | 平均长度:22.1 | $\epsilon$:0.173
Epsilon 400/500 | 最近 50 个Epsilon的平均奖励:7.63 | 平均长度:20.9 | $\epsilon$:0.135
Epsilon 450/500 | 最近 50 个Epsilon的平均奖励:7.75 | 平均长度:20.2 | $\epsilon$:0.105
Epsilon 500/500 | 最近 50 个Epsilon的平均奖励:7.89 | 平均长度:19.7 | $\epsilon$:0.082
网格世界训练完成 (Dyna-Q)。
可视化学习过程
绘制剧集奖励、长度和 ϵ \epsilon ϵ 衰减的图表。
# 绘制 Dyna-Q 在自定义网格世界中的结果
plt.figure(figsize=(18, 4))
# 奖励
plt.subplot(1, 3, 1)
plt.plot(dynaq_episode_rewards)
plt.title(f'Dyna-Q ($k={PLANNING_STEPS_K}$):Epsilon奖励')
plt.xlabel('Epsilon')
plt.ylabel('总奖励')
plt.grid(True)
if len(dynaq_episode_rewards) >= 50:
rewards_ma_dynaq = np.convolve(dynaq_episode_rewards, np.ones(50)/50, mode='valid')
plt.plot(np.arange(len(rewards_ma_dynaq)) + 49, rewards_ma_dynaq, label='50-Epsilon移动平均', color='orange')
plt.legend()
# 长度
plt.subplot(1, 3, 2)
plt.plot(dynaq_episode_lengths)
plt.title(f'Dyna-Q ($k={PLANNING_STEPS_K}$):剧集长度')
plt.xlabel('Epsilon')
plt.ylabel('步数')
plt.grid(True)
if len(dynaq_episode_lengths) >= 50:
lengths_ma_dynaq = np.convolve(dynaq_episode_lengths, np.ones(50)/50, mode='valid')
plt.plot(np.arange(len(lengths_ma_dynaq)) + 49, lengths_ma_dynaq, label='50-Epsilon移动平均', color='orange')
plt.legend()
# $\epsilon$
plt.subplot(1, 3, 3)
plt.plot(dynaq_episode_epsilons)
plt.title('Dyna-Q:$\epsilon$ 衰减')
plt.xlabel('Epsilon')
plt.ylabel('$\epsilon$')
plt.grid(True)
plt.tight_layout()
plt.show()
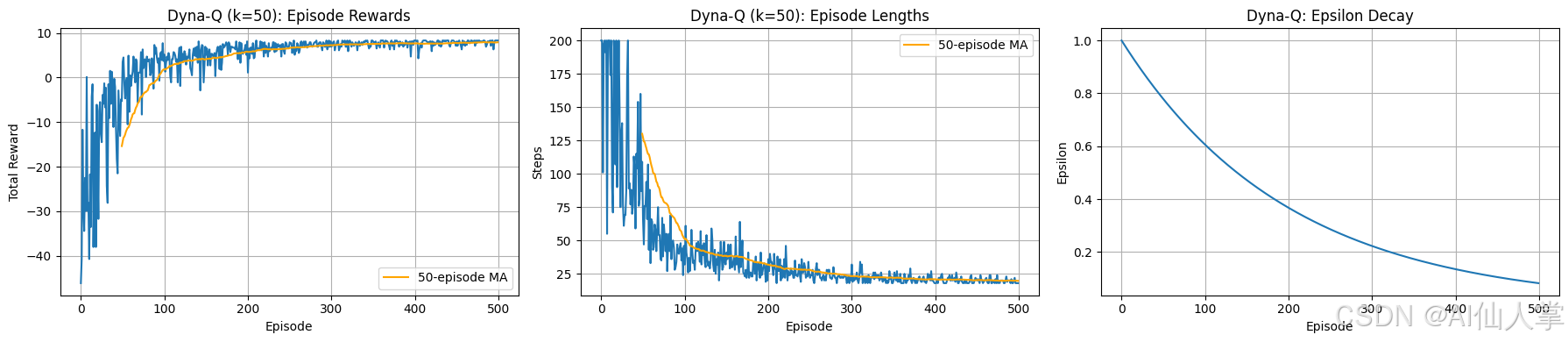
Dyna-Q ( k = 50 k=50 k=50) 学习曲线分析(自定义网格世界):
-
Epsilon奖励:
代理学习效果显著,移动平均值(橙色线)显示出奖励的稳步且显著增长,尤其是在大约第 50 到 200 个’Epsilon’之间,之后趋于稳定并接近最优值(大约 8)。原始奖励(蓝色线)在学习过程中存在一定的波动,但在找到最优策略后稳定下来,表明成功收敛。 -
'Epsilon’长度:
相应地,平均’Epsilon’长度大幅下降。移动平均值显示出明显的下降趋势,在大约第 300 个’Epsilon’时收敛到最优路径长度(大约 18 步)。原始长度最初非常嘈杂,但随着代理学习和探索( ϵ \epsilon ϵ)的减少,逐渐变得更加一致。 -
ϵ \epsilon ϵ 衰减:
控制探索率(选择随机行动的概率)的 ϵ \epsilon ϵ 值,按照指数衰减从 1.0 逐渐降低到接近 0.05 的低值。这种有计划的探索衰减允许代理在初期广泛探索环境,然后逐渐利用其学到的知识(通过真实和模型模拟的经验更新的 Q 值)。衰减率与观察到的学习进度非常匹配。
总体结论:
Dyna-Q(
k
=
50
k=50
k=50 规划步骤)成功解决了网格世界任务,通过将直接强化学习与基于模型的规划相结合,实现了高效学习。代理学习到了高奖励且高效的路径策略,并稳定收敛。这种有效性得益于计划的探索衰减以及从学到的世界模型中获得的额外更新,可能在某些情况下比纯无模型方法(如基本 Q-Learning)更快地收敛。
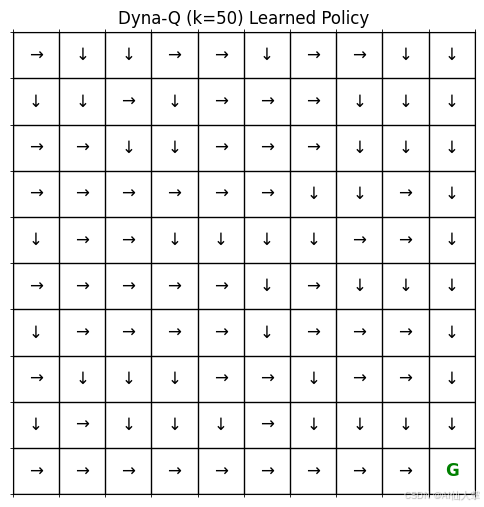
分析学到的策略和模型(可选可视化)
可视化从学到的 Q 表中得出的最终策略。
def plot_tabular_policy_grid(q_table: DefaultDict[Tuple[Tuple[int, int], int], float],
env: GridEnvironmentTabular) -> None:
"""
绘制从表格 Q 表中得出的贪婪策略。
"""
rows: int = env.rows
cols: int = env.cols
policy_grid: np.ndarray = np.empty((rows, cols), dtype=str)
action_symbols: Dict[int, str] = {0: '↑', 1: '↓', 2: '←', 3: '→'}
fig, ax = plt.subplots(figsize=(cols * 0.6, rows * 0.6))
for r in range(rows):
for c in range(cols):
state_tuple: Tuple[int, int] = (r, c)
if state_tuple == env.goal_state:
policy_grid[r, c] = 'G'
ax.text(c, r, 'G', ha='center', va='center', color='green', fontsize=12, weight='bold')
else:
q_values = [q_table[(state_tuple, a)] for a in range(env.get_action_space_size())]
if not q_values or all(q == 0 for q in q_values): # 如果状态未被访问或所有 Q=0
best_action = -1 # 表示尚未学到行动
symbol = '.'
else:
max_q = max(q_values)
best_actions = [a for a, q in enumerate(q_values) if q == max_q]
best_action = random.choice(best_actions) # 随机打破平局
symbol = action_symbols[best_action]
policy_grid[r, c] = symbol
ax.text(c, r, symbol, ha='center', va='center', color='black', fontsize=12)
ax.matshow(np.zeros((rows, cols)), cmap='Greys', alpha=0.1)
ax.set_xticks(np.arange(-.5, cols, 1), minor=True)
ax.set_yticks(np.arange(-.5, rows, 1), minor=True)
ax.grid(which='minor', color='black', linestyle='-', linewidth=1)
ax.set_xticks([])
ax.set_yticks([])
ax.set_title(f"Dyna-Q ($k={PLANNING_STEPS_K}$) 学到的策略")
plt.show()
# 绘制最终策略
print("\n绘制从 Dyna-Q 学到的策略:")
plot_tabular_policy_grid(agent.q_table, env_dynaq)
绘制从 Dyna-Q 学到的策略:
Dyna-Q 的常见挑战与扩展
挑战:模型准确性
- 问题:规划的有效性完全取决于学到的模型的准确性。如果模型质量差(尤其是在随机或复杂环境中),使用它进行规划可能会强化错误的动态,从而导致次优策略。
- 解决方案:
- 充分探索:确保代理充分探索,以体验多样化的转换,从而学习模型。
- 模型不确定性:更高级的方法会跟踪模型的不确定性,并相应地调整规划。
- 概率模型:学习分布 P ( s ′ , r ∣ s , a ) P(s', r | s, a) P(s′,r∣s,a),而不仅仅是单一结果。
- 限制规划:如果怀疑模型不准确,则减少 k k k。
挑战:规划的计算成本
- 问题:每个真实步骤执行 k k k 次更新可能会变得计算成本高昂,尤其是当 k k k 很大或状态空间很大时。
- 解决方案:
- 优化 k k k:选择一个适中的 k k k 值。
- 优先级扫描:一种扩展,其中规划步骤专注于那些值最有可能发生变化的状态(例如,其值刚刚显著变化的状态的前驱),而不是完全随机采样。
挑战:可扩展性(表格限制)
- 问题:基本的表格 Dyna-Q 无法扩展到大型或连续的状态/行动空间。
- 解决方案:
- 函数近似:使用神经网络对 Q 函数(或策略)以及可能的模型进行学习(例如,学习一个动态网络 s t + 1 = f ( s t , a t ) s_{t+1} = f(s_t, a_t) st+1=f(st,at))。这导致了使用函数近似的 Dyna 风格算法(例如,Dyna-DQN、World Models)。
挑战:确定性模型限制
- 问题:简单的模型 模型 ( s , a ) → ( r , s ′ ) \text{模型}(s, a) \rightarrow (r, s') 模型(s,a)→(r,s′) 假设转换是确定性的。它只存储 最后一次 观察到的结果。
- 解决方案:
- 学习频率/概率:在随机环境中存储计数或估计概率 P ( s ′ , r ∣ s , a ) P(s', r | s, a) P(s′,r∣s,a)。
- 更复杂的模型:使用能够表示分布的高斯过程或神经网络。
扩展:Dyna-Q+
- 针对环境动态可能发生变化的情况,它增加了“探索奖励”,以鼓励在最近未访问过的状态中尝试行动,从而更快地发现环境动态的变化。
结论
Dyna-Q 提供了一个清晰且有效的框架,用于将无模型学习与基于模型的规划相结合。通过从真实交互中学习环境模型,并使用它生成模拟经验进行额外更新,与纯无模型方法(如 Q-Learning, k = 0 k=0 k=0)相比,它可以显著提高样本效率。
它的核心优势在于能够多次利用每次真实经验——一次用于直接学习和模型改进,以及通过模拟规划步骤可能进行的多次更新。尽管基本的表格实现存在可扩展性和处理随机性的限制,但底层的 Dyna 架构是一个强大的概念,构成了许多使用函数近似和更复杂规划技术的先进基于模型的强化学习算法的基础。



















 917
917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











