






LP-ICP(Localizability-aware Point-to-Line and Point-to-Plane ICP)是一种针对极端非结构化环境中退化问题的点云配准框架。该方法通过结合点到线和点到面的距离度量,并引入可定位性检测与处理机制,提高了配准的准确性和鲁棒性。以下是该算法的相关内容。
一、算法原理概述
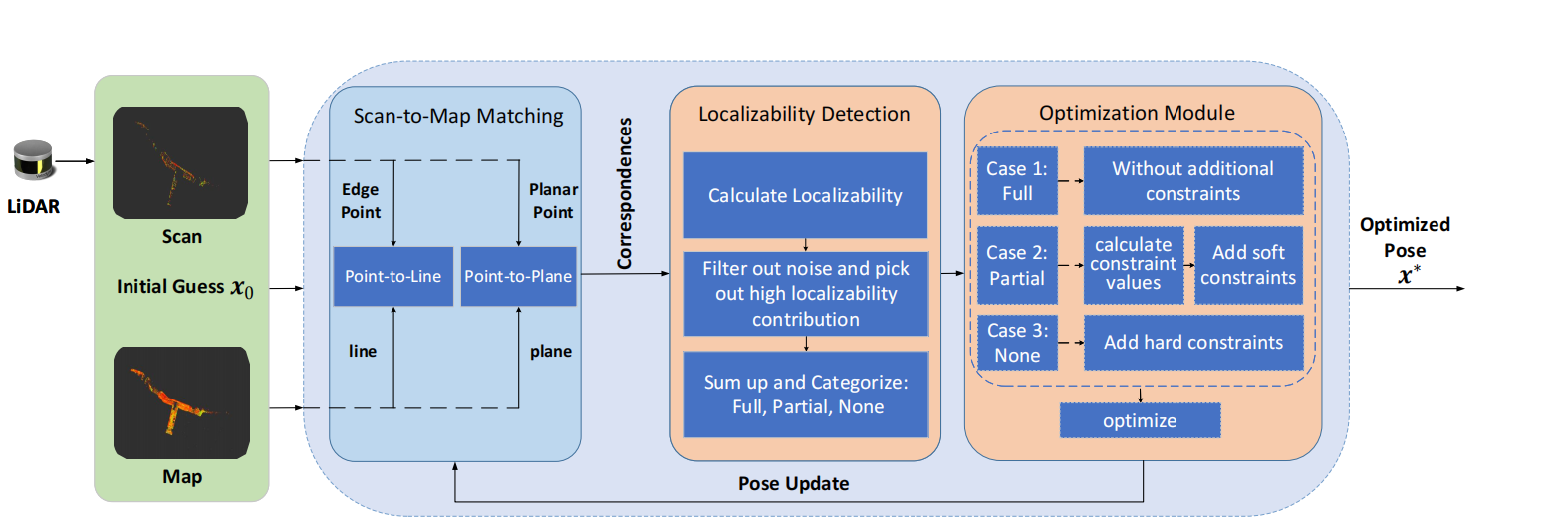
传统的ICP算法在特征稀疏或几何结构不明显的环境中容易出现退化,导致位姿估计在某些方向上不准确。LP-ICP通过以下两个模块来解决这一问题:
- 可定位性检测模块:分析边缘点(局部平滑度低)与线的对应关系,以及平面点(局部平滑度高)与面的对应关系,评估每个约束对位姿估计的贡献。
- 优化模块:根据可定位性分析结果,在优化过程中引入软约束和硬约束,限制位姿更新在退化方向上的变化。
二、系统框架流程
┌───────────────────────────┐
│ 1. 预处理 (Preprocessing) │
│ • 特征提取:边缘点/面点 │
│ • 构建 KD-Tree(地图) │
└─────────┬─────────────────┘
│
▼
┌───────────────────────────┐
│ 2. 对应关系建立 │
│ • 边缘点→直线 (point-to-line) │
│ • 面点→平面 (point-to-plane) │
└─────────┬─────────────────┘
│
▼
┌───────────────────────────┐
│ 3. 可定位性检测 (Detection) │
│ • 计算每个约束的“信息贡献” │
│ • 判断每个约束在各自由度上的 │
│ 观测强度 → 良好/弱/退化 │
└─────────┬─────────────────┘
│
▼
┌───────────────────────────┐
│ 4. 局部优化 (Optimization) │
│ • 构建带权残差的 ICP 代价函数│
│ • 对“退化方向”添加软/硬约束 │
│ • Gauss–Newton 求解更新 │
└─────────┬─────────────────┘
│
▼
┌───────────────────────────┐
│ 5. 输出最优位姿 │
└───────────────────────────┘
三、可定位性检测模块
该模块的核心是评估每个点云对应关系对位姿估计的贡献,具体步骤如下:
- 特征提取:从扫描点云中提取边缘点和平面点。
- 对应关系建立:将边缘点与地图中的线特征对应,平面点与面特征对应。
- 贡献度评估:计算每个对应关系对位姿估计的贡献度,形成信息矩阵。
通过上述步骤,构建出一个稀疏的因子图,反映每个约束在六自由度空间中的贡献。
可定位性贡献分析细节过程:
-
对于边缘点(点到线):
-
旋转方向贡献:$F_{e_r}^i \in \mathbb{R}^{3 \times 1}$
-
平移方向贡献:$F_{e_t}^i \in \mathbb{R}^{3 \times 1}$
-
-
对于平面点(点到面):
-
旋转方向贡献:$F_{p_r}^j \in \mathbb{R}^{3 \times 1}$
-
平移方向贡献:$F_{p_t}^j \in \mathbb{R}^{3 \times 1}$
-
通过聚合所有对应关系在每个自由度方向上的贡献,并与预设阈值进行比较,LP-ICP将每个方向的可定位性分为三类:
-
完全可定位(Full):该方向上的约束充足,位姿估计可靠。
-
部分可定位(Partial):该方向上的约束有限,位姿估计可能存在不确定性。
-
不可定位(None):该方向上缺乏约束,位姿估计存在退化风险。
四、优化模块
在优化模块中,LP-ICP引入了软约束和硬约束,以限制位姿更新在退化方向上的变化。具体的优化问题可以表示为带约束的最小二乘问题:([ar5iv][1], [johnwlambert.github.io][2])
min δ ξ ∑ i ∥ r i ( δ ξ ) ∥ 2 subject to A δ ξ = b \min_{\delta \xi} \sum_{i} \| r_i(\delta \xi) \|^2 \quad \text{subject to} \quad A \delta \xi = b δξmini∑∥ri(δξ)∥2subject toAδξ=b
其中:
- δ ξ \delta \xi δξ:位姿增量。
- r i ( δ ξ ) r_i(\delta \xi) ri(δξ):第 i i i个残差。
- A δ ξ = b A \delta \xi = b Aδξ=b:线性约束,表示在退化方向上的限制。
使用拉格朗日乘子法将上述带约束的优化问题转化为无约束问题:
min δ ξ , λ ∑ i ∥ r i ( δ ξ ) ∥ 2 + λ T ( A δ ξ − b ) \min_{\delta \xi, \lambda} \sum_{i} \| r_i(\delta \xi) \|^2 + \lambda^T (A \delta \xi - b) δξ,λmini∑∥ri(δξ)∥2+λT(Aδξ−b)
然后,使用高斯-牛顿方法求解该优化问题,迭代更新位姿,直到收敛。
优化约束机制细节:
根据可定位性检测结果,LP-ICP在优化过程中引入不同类型的约束:
-
硬约束(Hard Constraint):对于不可定位的方向,禁止位姿在该方向上的更新,以防止估计漂移。
-
软约束(Soft Constraint):对于部分可定位的方向,引入惩罚项,使位姿更新趋向于约束值,但不强制等于该值,从而减少估计波动。
-
无约束(No Constraint):对于完全可定位的方向,允许位姿自由更新。
这种约束机制确保了在退化方向上的位姿估计稳定性,同时保留了在良好约束方向上的估计精度。
五、公式推导细节
在优化过程中,残差函数 r i ( δ ξ ) r_i(\delta \xi) ri(δξ)通常是非线性的,因此需要进行线性化处理。对残差函数进行一阶泰勒展开:
r i ( δ ξ ) ≈ r i ( 0 ) + J i δ ξ r_i(\delta \xi) \approx r_i(0) + J_i \delta \xi ri(δξ)≈ri(0)+Jiδξ
其中:
- r i ( 0 ) r_i(0) ri(0):当前估计下的残差。
- J i J_i Ji:残差对位姿的雅可比矩阵。
将线性化后的残差代入优化目标函数,得到:
min δ ξ ∑ i ∥ r i ( 0 ) + J i δ ξ ∥ 2 + λ T ( A δ ξ − b ) \min_{\delta \xi} \sum_{i} \| r_i(0) + J_i \delta \xi \|^2 + \lambda^T (A \delta \xi - b) δξmini∑∥ri(0)+Jiδξ∥2+λT(Aδξ−b)
对上述目标函数求导并令导数为零,得到正规方程:
( ∑ i J i T J i ) δ ξ + A T λ = − ∑ i J i T r i ( 0 ) \left( \sum_{i} J_i^T J_i \right) \delta \xi + A^T \lambda = -\sum_{i} J_i^T r_i(0) (i∑JiTJi)δξ+ATλ=−i∑JiTri(0)
A δ ξ = b A \delta \xi = b Aδξ=b
该线性方程组可以使用QR分解等数值方法求解,得到位姿增量 δ ξ \delta \xi δξ和拉格朗日乘子 λ \lambda λ。
六、主要创新点与贡献
-
细粒度的可定位性检测:LP-ICP能够在6自由度的每个方向上独立评估可定位性,而非仅提供整体的退化评估,从而实现更精确的退化检测。([CSDN博客][1])
-
结合点到线和点到面的距离度量:通过同时利用边缘点和平面点的几何特征,增强了配准的鲁棒性和准确性。
-
引入软硬约束的优化机制:根据可定位性分类结果,动态调整优化过程中的约束策略,有效防止了在退化方向上的估计误差积累。
-
广泛的实验验证:在仿真和真实世界的数据集上进行了大量实验,结果显示LP-ICP在定位精度和鲁棒性方面优于或等同于现有最先进的方法。
-
开源实现:LP-ICP的代码和数据集已在GitHub上开源,便于研究人员和工程师进行复现和进一步研究。
七、实验验证
LP-ICP在多个仿真和真实世界的数据集上进行了验证,包括KITTI、NCLT等。实验结果表明,LP-ICP在退化环境下的定位精度和鲁棒性优于传统的ICP和其他先进方法。
八、代码与数据集
LP-ICP的代码和数据集已开源,地址为:
🔗 https://github.com/xuqingyuan2000/LP-ICP
该仓库包含了算法的实现、使用说明以及相关数据集,方便研究人员和工程实践者进行测试和应用。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











