







一,传递函数模型
1.线性系统的常系数线性常微分方程模型
Laplace变换
传递函数G(s)=Y(s)/U(s)
MATLAB输入语句
num=[b1,b2,b3,...,bm,bm+1];
den=[a1,a2,a3,...,an,an+1];
G=tf(num,den);2.传递函数模型
传递函数有2种输入方法。
方法一:分子分母输入法
传递函数G(s)=Y(s)/U(s)
MATLAB输入语句
num=[b1,b2,b3,...,bm,bm+1];
den=[a1,a2,a3,...,an,an+1];
G=tf(num,den);Eg:数学模型
MATLAB输入语句
num=[12,24,12,20];
den=[2,4,6,2,2]; %%逗号也可以换成空格
G=tf(num,den);方法二:直接输入法
Eg:数学模型
MATLAB输入语句
s=tf('s');
G=(s^3+2*s^2+3*s+4)/(s^3*(s+2)*((s+5)^2+5);2.传递函数属性修改
传递函数的属性可以通过get(tf)来查看。
延迟传递函数,其中
,表示有3秒的延迟。
可以通过对传递函数属性修改,来达到将延迟输入给计算机的目的。
在MATLAB中有3种方式。前两种方式通过语句调用,如下所示:
G.ioDelay=3 %%第一种修改方式
set(G,'ioDelay',3) %%第二种修改方式第三种是直接赋值的方法,即在传递函数后面直接乘以exp():
s=tf('s');
G=(s^3+2*s^2+3*s+4)/(s^3*(s+2)*((s+5)^2+5)*exp(-3*s);3.多变量系统传递函数矩阵模型
多变量系统不能用单个传递函数表示1,而应该表示为一个传递函数矩阵。
其中,表示第i输出对第j输入的传递函数,可以将
成为子传递函数。
一般,先定义子传递函数,再通过矩阵定义G(s)。
Eg:多变量传递函数矩阵模型
方法一:直接输入
MATLAB输入语句
G=[tf(0.1134,[1.78 4.48 1]),tf(0.924,[2.07 1]);tf(0.3378,[0.361 10.9 1]),tf(-0.318,[2.93 1])]; %%中间的分号表示矩阵的换行
G.ioDelay=[0.72 0;0.3,1.29] %%中间的分号表示矩阵的换行方法二:先输入子传递函数,再输入传递函数矩阵
先输入各个子传递函数
再按照普通矩阵输入的方式输入传递函数矩阵。
MATLAB输入语句
g11=tf(0.1134,[1.78 4.48 1],'ioDelay',0.72);
g12=tf(0.924,[2.07 1]);
g21=tf(0.3378,[0.361 1.09 1],'ioDelay',0.3);
g22=tf(0.1134,[1.78 4.48 1],'ioDelay',0.72);
G=[g111,g12;g21,g22] %%分号换行4.传递函数分子分母的提取
对于一般传递函数而言,分子分母的提取直接调用G.num即可。
但是对于传递函数矩阵,无法直接调用G.num。
以上面例子中的2*2传递函数矩阵为例,如果想要调用右下角(第二行第二列)的分子分母,需要调用[num,den]=tfdata(G(2,2),'v')。
二,状态方程
1.状态方程模型
(1)非线性状态方程模型
为系统状态变量,
为系统输入变量,
为系统输出变量。
如果有n个状态变量,这个系统为n阶系统。
上面的,
为非线性函数,so非线性状态方程。
如果,
为线性函数,则是线性状态方程。
(2)一般线性状态方程模型
时变
时不变
MATLAB输入方法:
G=ss(A,B,C,D);
注意:矩阵的维度。
(3)描述符系统(物理可实现VS物理不可实现)
系统模型分为物理可实现和物理不可实现。
物理可实现,即系统的分子阶次不能高于系统的分母阶次。
否则的话,该系统为物理不可实现的系统。
所有物理可实现的系统,都可以表示成上述状态方程的标准形式。
但是物理不可实现的系统如果强行写成上述状态方程的标准形式,会出现状态方程的矩阵不可逆的情况。为此,需要引入描述符系统,将物理不可实现的系统表示为描述符系统的形式。
描述符系统如下所示:
其中,在物理不可实现系统中,E是奇异矩阵。
对于物理可实现的系统,E是单位矩阵。
MATLAB输入方法:
G=ss(A,B,C,D,E);
注意:矩阵的维度。
Eg:状态方程模型
MATLAB代码:
A=[-12,-17.2,-16.8,-11.9;6,8.6,8.4,6;6,8.7,8.4,6;-5.9,-8.6,-8.3,-6];
B=[1.5,0.2;1,0.3;2,1;0,0.5];
C=[2,0.5,0,0.8;0.3,0.3,0.2,1];
D=zeros(2,2); %%注意矩阵的维度
G=ss(A,B,C,D)其中,因为D是零矩阵,因此也可以用G=ss(A,B,C,0)代替,即:
MATLAB代码
A=[-12,-17.2,-16.8,-11.9;6,8.6,8.4,6;6,8.7,8.4,6;-5.9,-8.6,-8.3,-6];
B=[1.5,0.2;1,0.3;2,1;0,0.5];
C=[2,0.5,0,0.8;0.3,0.3,0.2,1];
G=ss(A,B,C,0) %%直接写0,MATLAB可以自动识别矩阵维度(4)带时间延迟的状态方程
数学模型:
从数学模型来看,如果延迟作用在输入信号u(t)上,称为输入延迟,即InputDelay。如果延迟作用在输出信号y(t)上,称为输出延迟,即OutputDelay。
MATLAB代码
G=ss(A,B,C,D,E,'InputDelay',τi,'OutputDelay',τ0)BUT带时间延迟的模型在实际应用中,光有输入延迟和输出延迟是不够的,SO在MATLAB中还定义了一种带有内部延迟的系统。
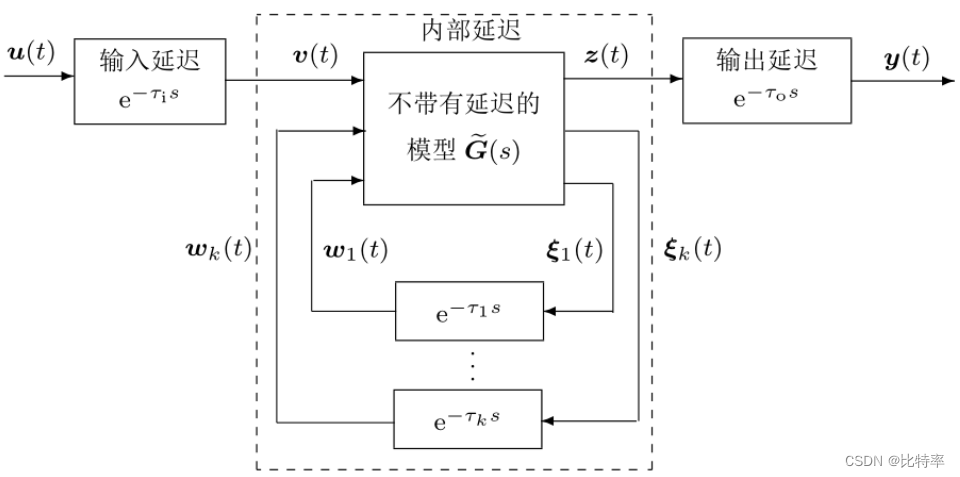
内部延迟是作用在状态信号上的,其中一些状态带有延迟。
2.线性系统的零极点模型
零极点模型:
零点zi,极点pi,增益K
方法一:
z=[z1;z2;...;zm]; %%注意中间用分号
p=[p1;p2;...;pn];
G=zpk(z,p,K)方法二:
s=zpk('s');
G=...Eg:零极点模型
方法一:
Z=[-5;-2-2i;-2+2i]; %%中间用分号
P=[-4;-3;-2;-1];
G=zpk(Z,P,6)方法二:(有些版本可能会出错)
s=zpk('s');
G=6*(s+5)*(s+2+2i)*(s+2-2i)/(s+4)/(s+3)/(s+2)/(s+1)














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









