







PointNet网络是由斯坦福大学的研究人员于2017年提出的一种深度学习网络,专门用于处理三维点云数据。与传统的二维图像数据不同,三维点云数据由一系列无序的空间点组成,每个点包含了空间坐标和其他可能的信息(如颜色、强度等)。PointNet网络通过一种全新的方式来处理这种无序数据,实现了对点云数据的有效学习和识别。
PointNet网络主要由两部分组成:点云特征提取器和全局特征聚合器。点云特征提取器负责从每个点中提取局部特征,而全局特征聚合器则将这些局部特征整合成全局特征,用于最终的分类或回归任务。具体来说,点云特征提取器通过多层感知机(MLP)对每个点的坐标和其他信息进行非线性变换,从而提取出更具代表性的特征。通过这种方式,PointNet网络能够捕捉到点云数据的局部细节和几何结构。
PointNet网络在处理3D点云数据方面具有许多优势,例如对称性、轻量级和可扩展性。它能处理任意排列的点云,无需额外的排序或网格化步骤;相对其他复杂的3D卷积网络,PointNet的参数少,训练更快;可以与其他模块结合,构建更复杂的3D深度学习网络。
PointNet网络被广泛应用于多个领域,如3D对象识别、3D重建、室内布局理解和医疗成像分析等。在自动驾驶、机器人导航等领域,识别环境中的物体是关键任务,PointNet能有效地完成此任务。同时,它也可以基于点云的数据恢复三维几何结构,如建筑、地形等。在智能家居、虚拟现实场景中,PointNet可以分析室内空间布局以提供个性化服务。在医学图像处理中,如CT或MRI扫描,PointNet可以识别解剖结构。
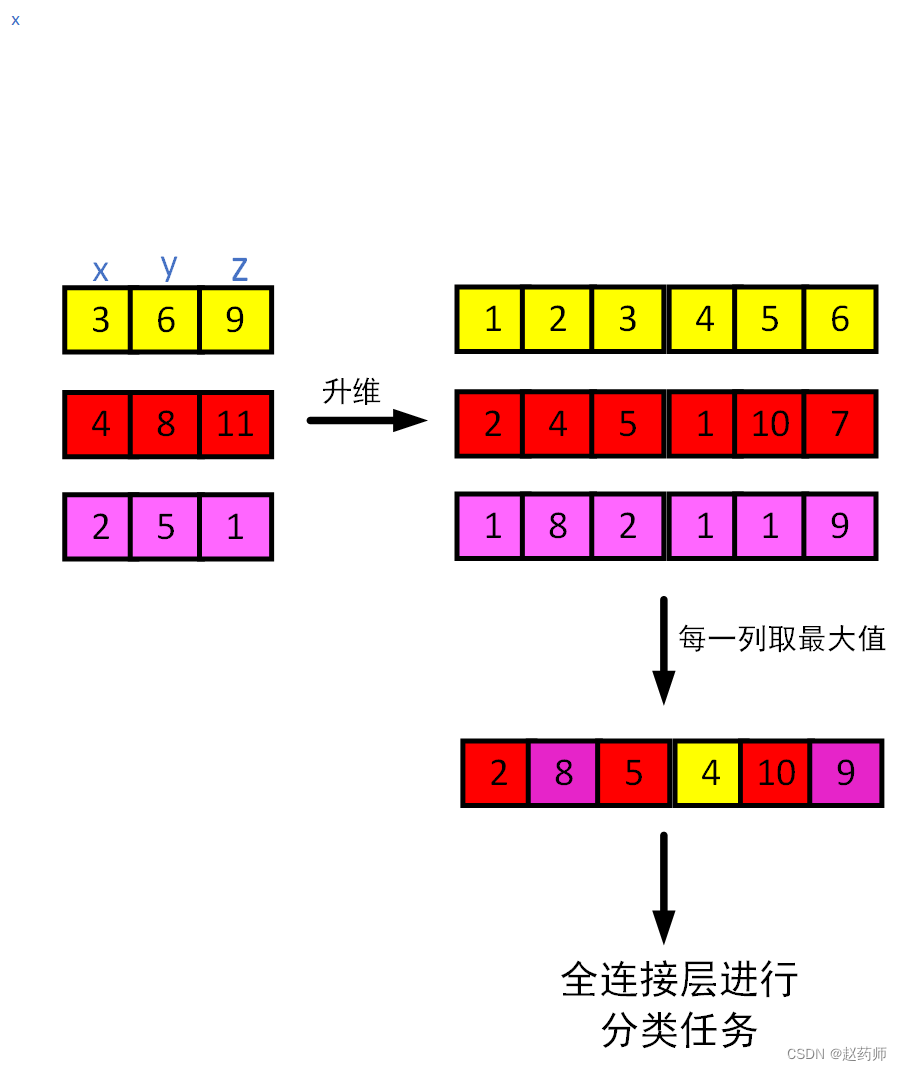
点云分类任务:
首先对点云进行升维,每一列取最大值,经过全连接层给出类别。
取最大值具有置换不变性,比如说第一行和第三行对调一下,并不影响最大值。
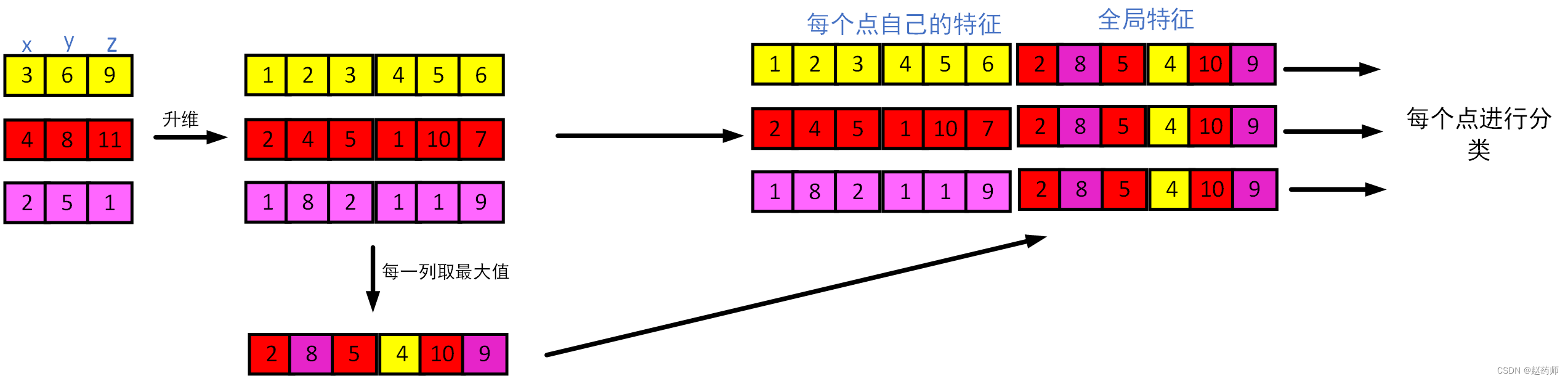
点云的分割任务,分割任务就是对每一个点进行分类。
把全局特征拼接到每一个局部特征后面,逐点经过全连接层分类。
















 978
978











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











