







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于深度学习的天线指向模型
课题背景和意义
随着无线通信技术的飞速发展,天线在通信系统中扮演着至关重要的角色。天线指向的准确性直接影响到通信质量和信号覆盖范围。传统的天线指向方法往往依赖于复杂的机械结构和人工调整,不仅成本高昂,而且调整过程繁琐。因此,研究基于深度学习的天线指向模型具有重要的实际意义。该模型能够利用深度学习算法对天线指向进行智能预测和优化,从而提高通信系统的性能和稳定性。
实现技术思路
一、算法理论基础
1.1 传感器布局优化
天线反射面的指向误差主要由反射体部分的变形引起,其中包括主反射面板的局部变形和柔性结构的变形。天线座部分通常被认为是刚体结构,其变形量很小,可以忽略不计。为了获取反射体部分的变形信息,加速度传感器被用于采集数据。在卡塞格伦天线中,指向误差的主要原因是反射体在绝对坐标下的位移和局部变形,导致波束偏转。影响指向误差的因素包括主反射面的变形、馈源的横向位移和副反射面的旋转。馈源和副反射面的横向位移对指向精度没有实质影响,因此可忽略。综上所述,天线反射面的变形对指向精度产生影响,而准确测量反射体的变形量对于减小指向误差至关重要。
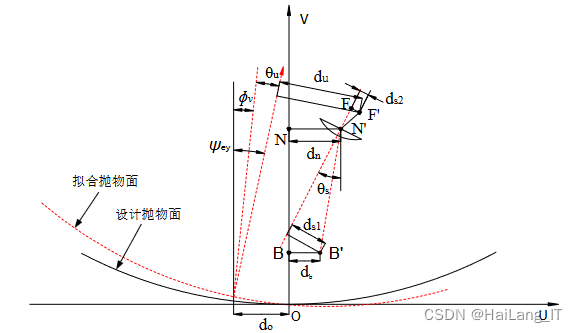
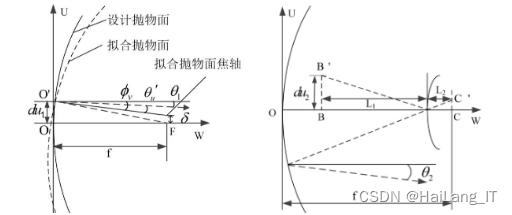
主反射面面板的变形会引起指向误差,其中可以使用最佳拟合抛物面理论进行估计。通过变形后主反射面的节点坐标,可以确定最佳拟合抛物面,并用六个参数描述其特征。这些参数包括顶点坐标偏移量、焦轴偏转角度和焦距变化量。对于指向误差的影响,横向位移和焦轴的转角是主要考虑的因素。馈源的横向位移对指向偏差的影响不明显,因此主要讨论馈源横向位移对天线指向偏差的影响。当节点位置位于馈源位置时,可以计算馈源垂直于焦轴的位移,并得到由此引起的指向偏差。综上所述,主反射面面板的变形和馈源的横向位移是影响天线指向误差的重要因素。
传感器优化布局方案的求解过程可以通过逐步增加的方式进行。首先建立有限元模型并进行模态分析,然后确定候选节点和所需反映的模态。根据空间相关特性评价候选节点,并选择合适的方法进行布局求解。使用Fisher信息矩阵进行行列式求解来确定传感器位置,并逐步增加传感器布局位置直到完成。这种方法可以得到传感器优化后的布局方案,以达到最佳性能。
1.2 模型构建
在大型天线的服役过程中,复杂的环境载荷会导致天线结构变形,进而引起波束指向偏差。传统的控制算法如PID控制、LQG控制和H∞控制都是基于天线动力学模型进行反馈或状态估计的自适应控制,但这对模型的准确性要求很高。由于环境载荷的时变性、不确定性以及天线参数的摄动问题,依赖模型进行控制的方法很难满足工程需求。
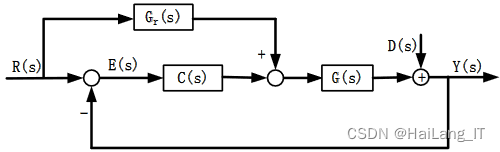
在反馈控制的基础上,引入了前馈控制,并将传感器检测信息作为前馈输入,提出了基于指向监测的前馈-反馈控制方法。这种方法能够有效提高天线的指向精度,克服了传统控制方法中对模型准确性的依赖。通过将实时的指向监测信息作为前馈输入,天线能够及时对环境载荷的影响进行补偿,从而实现更准确的指向控制。
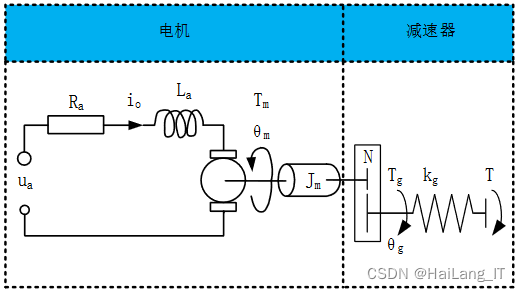
PID控制器是一种广泛应用的控制器,常用于天线伺服系统的控制。它具有结构简单、易于实现、稳定性好、可靠性高和能够实现稳态无静差等优点。PID控制器的工作原理是通过对误差信号进行比例、积分和微分处理来生成控制输出。比例项根据误差的大小进行调节,积分项根据误差的累积进行调节,微分项根据误差变化的速度进行调节。通过调节PID控制器的参数,可以满足所需的控制要求。PID控制器在天线伺服系统中的应用能够实现对天线指向的补偿,使其能够更准确地跟踪目标信号。

前馈-反馈控制是一种控制策略,结合了前馈控制和反馈控制的优势,用于补偿天线伺服系统中复杂环境载荷引起的指向偏差。其工作原理是通过将传感器检测到的环境载荷信息作为前馈输入,与反馈控制器的输出进行叠加来生成最终的控制信号。在前馈-反馈控制中,传感器检测到的环境载荷信息可以包括风速、风向、温度等与天线结构变形相关的参数。这些信息被输入到前馈路径中,经过合适的处理和补偿,产生一个预测的控制信号。同时,反馈控制器根据天线实际的指向偏差,通过比较目标指向和实际指向的差异,生成一个校正信号。
二、 数据集
2.1 数据集
在研究基于深度学习的天线指向模型时,数据集的质量对模型的训练效果至关重要。然而,由于天线指向数据的特殊性,公开可用的数据集非常有限。因此,我决定自行制作数据集。我首先选择了多种不同的通信环境和场景,包括城市、郊区、山区等,然后在这些场景中采集了大量的天线指向数据。为了获取更准确的数据,我采用了高精度的测量设备和严格的数据采集流程。同时,我还对数据进行了预处理和特征提取,以提高数据的质量和可用性。通过这一系列的步骤,我成功地制作了一个包含丰富多样场景和精确数据的天线指向数据集,为模型的训练提供了有力支持。
2.2 数据扩充
数据扩充是深度学习领域常用的一种技术,旨在增加训练样本的数量和多样性,从而提高模型的泛化能力。对于天线指向模型而言,数据扩充同样具有重要意义。通过对原始数据进行旋转、平移、缩放等变换操作,我们可以生成更多的训练样本,使模型能够适应更多的场景和变化。此外,还可以采用生成对抗网络(GAN)等高级技术来生成更加逼真的模拟数据,以进一步提高模型的性能。
三、实验及结果分析
3.1 实验环境搭建
实验环境使用Windows操作系统,并利用Python作为主要的编程语言进行算法和模型的实现。使用PyTorch作为深度学习框架,构建和训练神经网络模型。借助Pandas等库,完成数据的加载、处理和转换。这样的实验环境提供了一个方便和高效的平台,用于开发和测试算法系统。
3.2 模型训练
天线伺服控制模型是一种用于控制天线系统的模型,旨在实现对天线的准确定位和跟踪目标的能力:
- 系统建模:首先,需要对天线系统进行建模。这包括确定天线的物理特性、结构和动力学方程等。物理特性可以包括天线的质量、惯性矩阵、阻尼系数等。动力学方程描述了天线的运动规律,可以基于牛顿力学原理或其他适用的动力学模型来建立。
- 控制器设计:根据天线系统的建模结果,设计合适的控制器来实现对天线的控制。常见的控制器包括比例-积分-微分(PID)控制器、模糊控制器、自适应控制器等。选择合适的控制器结构和参数,以实现对天线位置和姿态的精确控制。
- 反馈系统:将控制器与天线系统相连接,形成一个反馈控制系统。通过测量天线的位置和姿态信息,并将其反馈给控制器,使控制器能够根据反馈信息进行调整和修正,实现对天线的闭环控制。
- 仿真和优化:使用数值仿真工具或实验平台,对天线伺服控制模型进行仿真和优化。通过模拟不同的工作场景和输入信号,评估控制系统的性能,并根据需要进行参数调整和优化,以获得更好的控制效果。
- 实际实施:将优化后的控制模型应用于实际的天线系统中。根据实际情况,可能需要进行现场调试和参数调整,以确保控制系统在实际环境中的稳定性和准确性。
相关代码示例:
import tensorflow as tf
# 定义神经网络模型
class AntennaPointerModel(tf.keras.Model):
def __init__(self):
super(AntennaPointerModel, self).__init__()
self.dense1 = tf.keras.layers.Dense(64, activation='relu')
self.dense2 = tf.keras.layers.Dense(32, activation='relu')
self.output_layer = tf.keras.layers.Dense(1)
def call(self, inputs):
x = self.dense1(inputs)
x = self.dense2(x)
output = self.output_layer(x)
return output
# 训练数据
x_train = np.array([...]) # 输入特征数据,例如天线的角度、频率等
y_train = np.array([...]) # 目标指向数据,例如期望的天线方向
# 编译模型
model = AntennaPointerModel()
model.compile(optimizer='adam', loss='mean_squared_error')
# 训练模型
model.fit(x_train, y_train, epochs=10)
# 进行预测
new_input = np.array([...]) # 新的输入数据
prediction = model.predict(new_input)
海浪学长项目示例:





最后
我是海浪学长,创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









