









自动驾驶测试场景
一、概念
自动驾驶测试场景是指在一定的时间和空间范围内,自动驾驶汽车与行驶环境中的其它车辆、道路、交通设施、气象条件等元素综合交互过程的一种总体动态描述。它是自动驾驶汽车的驾驶情景与行驶环境的有机组合,既包括各类实体元素,也涵盖了实体执行的动作及实体之间的连接关系;亦是验证车辆在真实或模拟环境中处理各类驾驶任务的关键环节,其设计直接影响系统安全性与可靠性。
二、分类
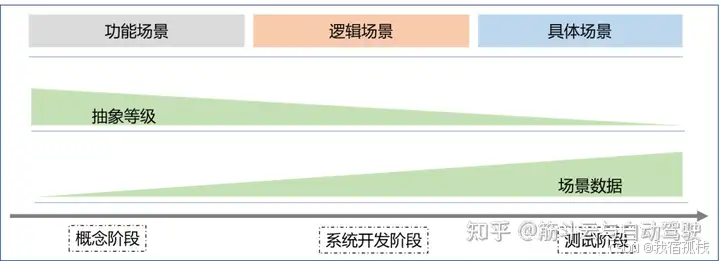
2.1、按照场景的抽象程度可分为:功能场景、逻辑场景、具体场景。
- a.功能场景:ü 通过语义描述的最抽象级别的操作场景, 即通过语言场景符号来描述场景区域内的实体以及实体间的关系;ü 功能场景用于概念阶段的项目定义、危险分析和风险评估;在测试过程中,往往需要将功能场景转换为逻辑场景,并转换为可用于相应仿真环境的数据格式。
- b.逻辑场景ü 通过定义状态空间内变量的参数范围来表达实体特征和实体间的关系;ü 逻辑场景是基于状态空间变量对功能场景的进一步详细描述,用于项目开发阶段生成需求;对于每一个具有连续取值范围的逻辑场景, 都可以派生出任意数量的具体场景。
- c.具体场景ü 通过确定状态空间中每个参数的具体值来明确描述实体和实体间的关系,以状态空间详细描述了测试场景;ü 具体场景可以直接转化为测试用例;要将具体场景转换成测试用例, 需要增加被测对象的预期行为表现以及对相关测试设施的需求。
2.2.、按功能划分
- 感知测试:目标检测(行人/车辆/障碍物)、车道线识别、交通标志识别等。
- 决策规划测试:路径规划、避障策略、交通规则遵守(如红灯/变道)。
- 控制测试:刹车/加速/转向平滑性、紧急情况下的制动性能。
2.3、 按环境复杂度
- 封闭场地:测试基础功能(如泊车、低速避障),常见于初期开发。
- 开放道路:涵盖城市道路、高速、山路等真实场景,需应对动态交通流。
- 极端环境:雨雪冰雾、强光逆光、复杂天气下的传感器鲁棒性。
2.3、按场景类型
- 常规场景:直行、转弯、跟车、超车。
- 边缘场景:罕见但危险的Case(如突然横穿马路、道路施工标识误判)。
- 长尾场景:概率极低但后果严重的事件(如「鬼探头」行人)
三、要素
测试场景要素:主要分为测试车辆自身要素和外部交通环境要素两大部分;外部交通环境要素又涵盖:静态环境要素、动态环境要素、交通参与者要素、气象要素等。
- 测试车辆自身要素:指测试车辆自身的基础属性、位置信息、运动状态信息及驾驶任务信息。
- 静态环境要素:指交通环境中静止状态的物体。包括:道路、交通设施、周围景观以及障碍物等。
- 动态环境要素:指交通环境中处于动态变化的要素。包括:动态指示设施 和 通信环境信息。
- 交通参与者要素:在自动驾驶测试场景中对本车决策规划造成影响的对象信息。包括:车辆、行人和动物。
- 气象要素:包括驾驶场景中的环境温度、光照条件以及天气情况等信息。

四、挑战与趋势
4.1、长尾场景覆盖
如何高效生成罕见场景?需结合数据挖掘(从事故报告、保险理赔中提取)与合成数据技术。
4.2、伦理决策测试
道德困境模拟(电车难题变种),目前依赖专家定义优先级规则。
4.3、车路协同测试
V2X通信延迟、信号干扰对决策的影响需在联合测试中验证。
4.4、联邦学习驱动
多车企共享匿名化测试数据,提升场景多样性而不泄露商业机密。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











