







解决什么问题:实现在寻路的过程中,去自动避开一些自己设定的区域,例如避开沼泽、水域等。
如何设置:
默认情况下烘焙后产生的寻路区域都是Walkable,
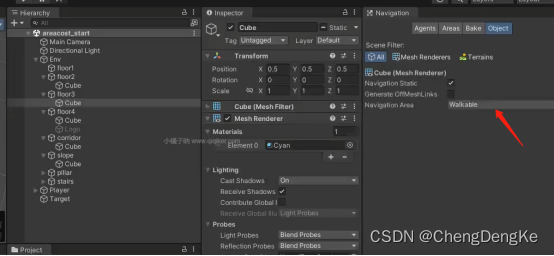
如果想将不同区域进行区分,首先需要Areas中设置不同的区域标签
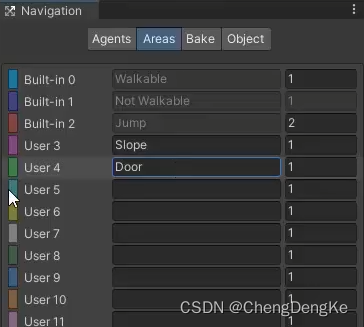
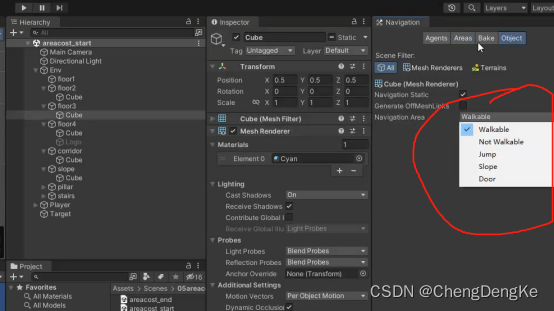
再将选中的物体标记为对应区域标签。
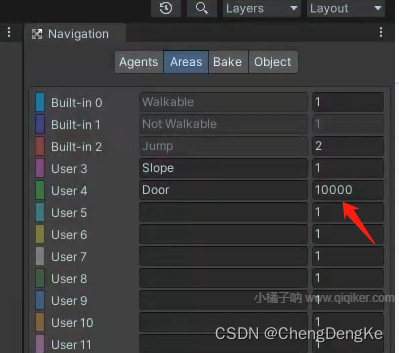
那么如何通过设置成本去自动避开对应区域呢,如图所示,只需要设置后面的参数就可以。可以理解成成本越低,此区域寻路生成路径的优先级越高。这样就实现了自动避开某个成本高的区域,去成本更低的区域进行寻路的效果。
通过代码实现设置成本:

备注:师从plane 有想跟着老师学习的同学可以看看老师的课,都是干货~
学习链接:https://www.qiqiker.com/















 566
566











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











