







1.选中导航组件在inspector面板处的区域选项后就会出现下面这个面板
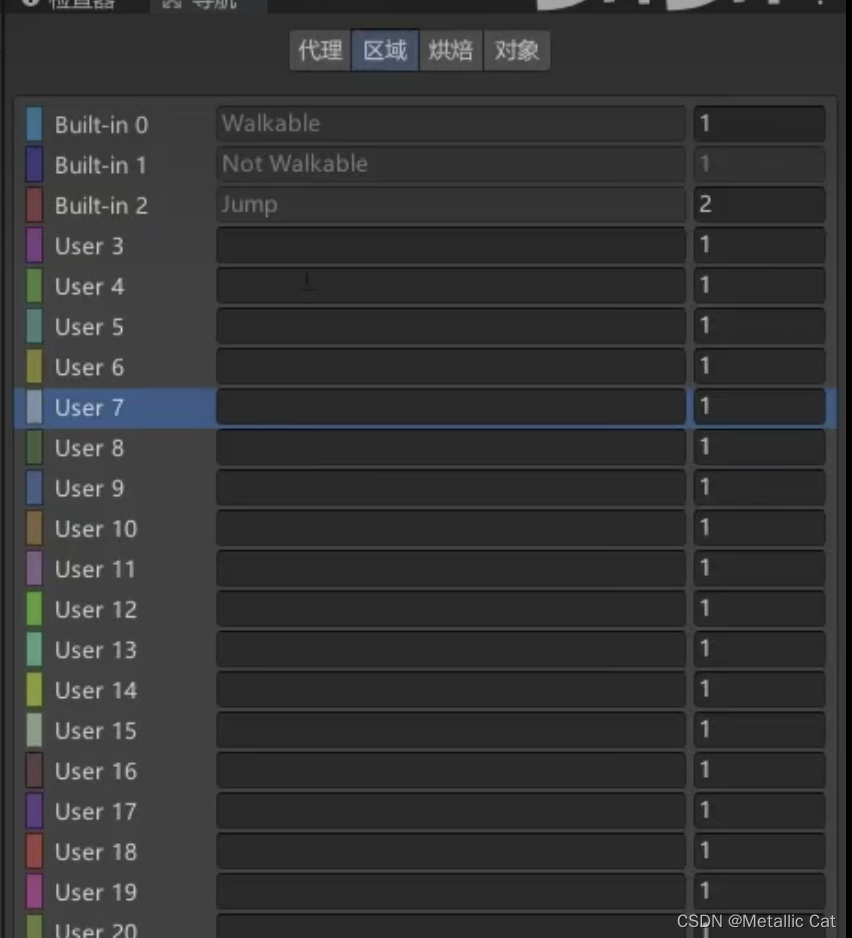
默认就有三个区域,其它的区域我们可以自己去设定
每一个区域都有自己的颜色,这个颜色的标记就在区域的最左边这一排
每一个区域也都有自己的成本,这个成本在最右排
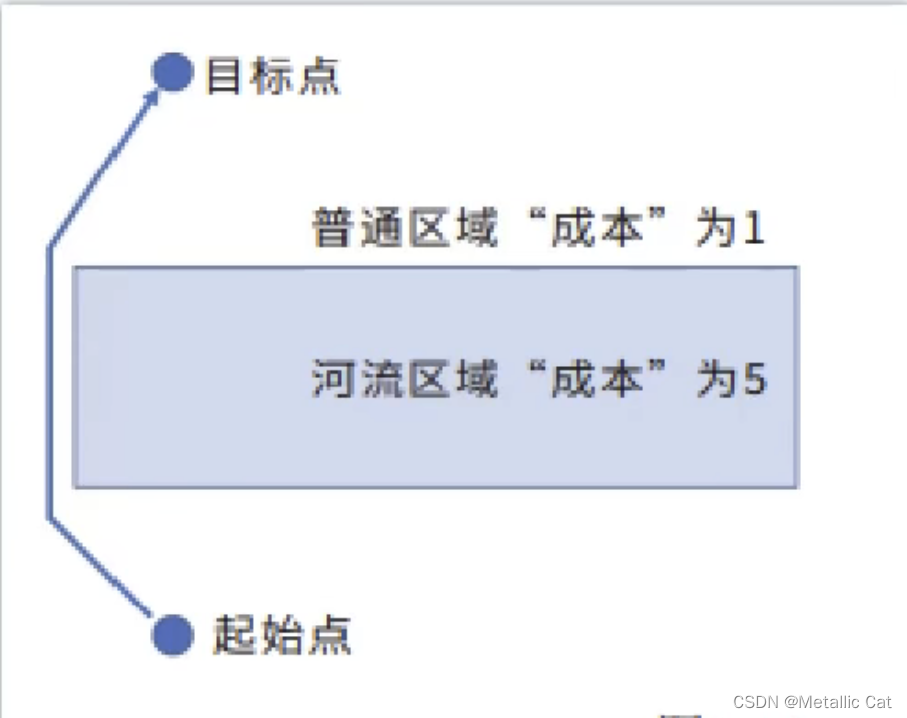
这个成本是什么东西呢? --- 其实可以理解为在这个区域每走1米所需要的体力
AI算法会将从起点到终点所有可通过路径的成本都算出来然后选择成本最低的路径前行
我们可以自己在区域面板中创建一个区域,并为其设置体力,那么问题又来了,我们该如何在游戏场景中布置这个我们自置的导航区域呢?
1.创建一个游戏物体作为区域(可以用平面,地形等等游戏物体)来代表河流(记得把这个游戏物体设置为 navigation static 点击小箭头就能够进行设置了)
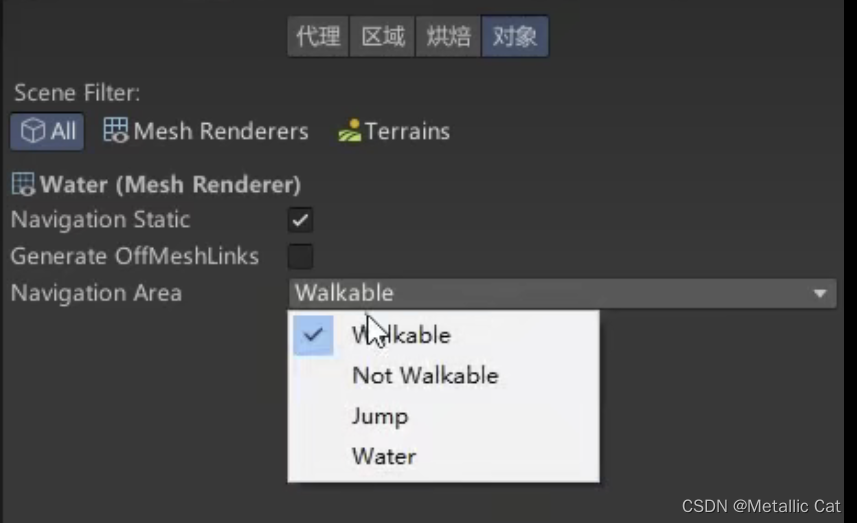
2.选中游戏物体,然后选择其inspector检查面板中的导航的对象选项(只要物体被设置为了 navigation static 就会具有导航面板(当然前提是有游戏物体挂载了导航组件))
然后我们就可以在对象选项中的navigation area中为我们当前选中的游戏物体选择它对应的导航区域了:
3.选择好导航区域之后来到我们的烘焙选项处选择Bake进行烘焙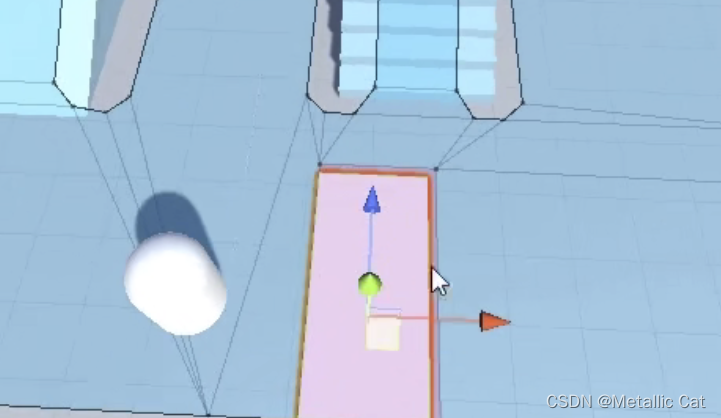
回到我们最开始的的导航组件中来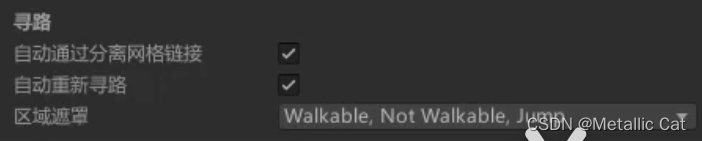
在寻路中有这么一个区域遮罩选项,点开之后如果我们取消勾选里面的某个区域,则这个区域将永远无法导航通过















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









