




 本文介绍了学习Direct3D 12 (D3D12) 中的Shadow Map技术,通过分析MiniEngine源码,探讨了shadowBuffer和shadowCamera的实现,并详细记录了调试过程中遇到的问题,包括柱子上没有影子的解决方法。最后,作者反思了自己在学习DX12过程中的困惑和成长。
本文介绍了学习Direct3D 12 (D3D12) 中的Shadow Map技术,通过分析MiniEngine源码,探讨了shadowBuffer和shadowCamera的实现,并详细记录了调试过程中遇到的问题,包括柱子上没有影子的解决方法。最后,作者反思了自己在学习DX12过程中的困惑和成长。
shadow map技术简介
Shadow Map网上有大把的技术文档。
简单说就是设置一个camera到需要产生阴影的光源位置,根据光源类型有不同的camera类型。
使用这个camera观察世界,生成深度图。
回到真正的camera那里,在绘制世界的时候,判断当前顶点的深度与深度图上对应位置的值。
如果顶点深度小于(根据设置,也可以大于)深度图的值,代表没有被遮挡,否则代表在阴影中。
MiniEngine中的shadowBuffer
本身就是一个深度缓冲区。稍微封装了下,方便绘制阴影深度图到buffer中
MiniEngine中的shadowCamera
这个camera啊,一直没看懂,根据官方的例子,始终无法实现正常的阴影。
考虑到camera本身已经被修改过,所以这个shadwoCamera也要修改
调试以及知其然而不知所以然的魔改过程
做好后,发现没有阴影。
两个怀疑点
- 阴影pso参数错误
- shadowCamera错误
对于1,修改了很多参数,发现也没有什么用。
于是开始调试2
- 场景中仅保留一个渲染目标,方便进行图形调试
- 设置阴影绘制的shadowCamera为正常的camera,发现可以绘制出阴影图。确定是shadowCamera的问题
- 研究shadowCamera的代码。发现看不明白
- 最后决定直接把shadowCamera魔改下。当然并没有按照d3d12book一样采用正交摄像机。暂时还是用的透视
void GameCore::ShadowCamera::UpdateMatrix(
Vector3 LightDirection, Vector3 ShadowCenter, Vector3 ShadowBounds,
uint32_t BufferWidth, uint32_t BufferHeight, uint32_t BufferPrecision )
{
SetLookDirection(LightDirection, Vector3(kYUnitVector) );
// Converts world units to texel units so we can quantize the camera position to whole texel units
Vector3 RcpDimensions = Recip(ShadowBounds);
Vector3 QuantizeScale = Vector3((float)BufferWidth, (float)BufferHeight, (float)((1 << BufferPrecision) - 1)) * RcpDimensions;
SetPosition(-LightDirection * ShadowBounds.GetX() / 2.0f);
// 看不懂原先的代码什么意思, 所以暂时直接改成这样吧
// // Transform to view space
// ShadowCenter = ~GetRotation() * ShadowCenter;
// // Scale to texel units, truncate fractional part, and scale back to world units
// ShadowCenter = Floor(ShadowCenter * QuantizeScale) / QuantizeScale;
// // Transform back into world space
// ShadowCenter = GetRotation() * ShadowCenter;
//
// SetPosition(ShadowCenter);
SetProjMatrix( Matrix4::MakeScale(Vector3(2.0f, 2.0f, 1.0f) * RcpDimensions) );
Update();
// Transform from clip space to texture space
m_ShadowMatrix = Matrix4( AffineTransform( Matrix3::MakeScale( 0.5f, -0.5f, 1.0f ), Vector3(0.5f, 0.5f, 0.0f) ) ) * m_ViewProjMatrix;
}
原先阴影摄像机这个中心点很诡异,考虑到原本为右手坐标系,而且本身我修改过baseCamera代码。这里暂时也就不纠结了。改成我喜欢的一种简单的方式来实现就可以了。
简单跑一下,发现阴影正常了。不错。
柱子上没有影子?
结果发现柱子上没有影子。对于pso的参数,文档也极少。
尝试修改下,发现成功了
RasterizerShadow.SlopeScaledDepthBias = 1.5f;
RasterizerShadow.DepthBias = 100;
总结
以前看过一篇文章,讲这个程序员有一类是这样的,靠瞎蒙编程。蒙对了就不管了。
我现在学dx12就是这么个过程。
对于dx12很多的参数做不到理解,也找不到说明什么的。
不管怎么样,还是要一步一步慢慢地走。我觉得坑踩多了,自然而然就会有一些理解了,期间也要继续学习dx12相关的一些知识。
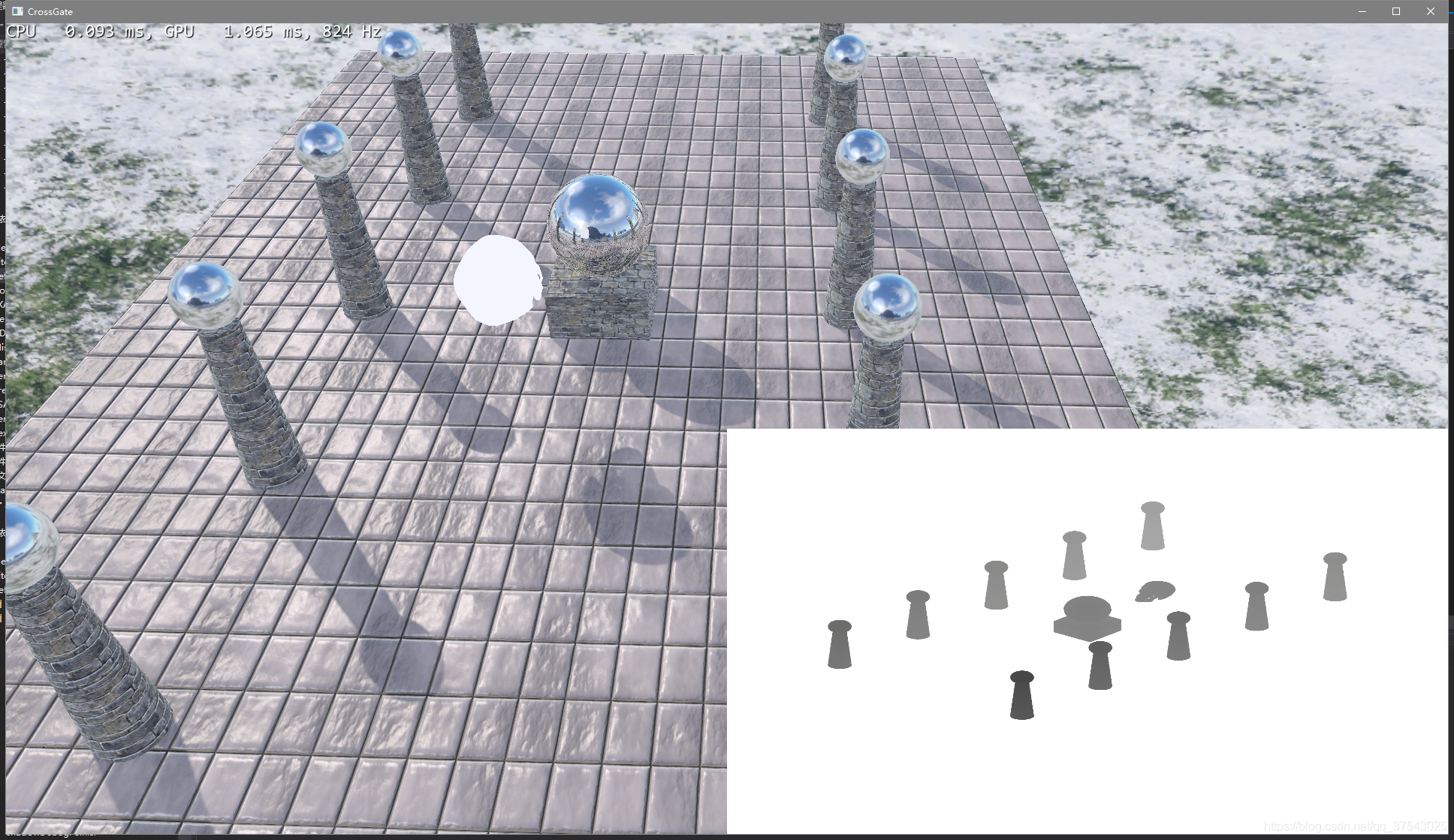
效果图:


















 752
752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









