







ORB_SLAM2编译运行
1. ORB-SLAM2编译运行
1.1 安装依赖库
编译ORBSLAM2需要的第三方依赖库包括:
- OpenCV ( 版本 >2.4.3)
- Eigen3 (版本 > 3.1.0)
- Pangolin
- DBoW2和g2o(包含在工程中,不需要单独安装)
- ROS
前三个依赖库安装教程:安装教程;
ROS安装教程:ROS-Kinetic安装;
1.2 编译
根据官方说明,可按照以下步骤进行, 编译过程会出现两个问题,具体解决方案请看第2节:
# 将ORB_SLAM2克隆到本地文件目录下
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
# 打开.bashrc文件
gedit ~/.bashrc
# 将下面一行添加到.bashrc文件的最后一行,其中PATH需要改为ORB_SLAM2所在的目录路径
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
# source确保生效
source ~/.bashrc
# 1.编译非ROS版本
cd ORB_SLAM2
sudo chmod +x build.sh
./build.sh
# 2.编译ROS版本
cd ORB_SLAM2
sudo chmod +x build_ros.sh
./build_ros.sh
1.3 运行测试
数据集: EuRoC(笔者测试), KITTI, TUM.
1. 非ROS版运行测试
# EuRoC单目, 按要求需要修改数据集路径, 相机内参
./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml /home/guofeng/桌面/Database/Euroc/mav0/cam0/data Examples/Monocular/EuRoC_TimeStamps/MH03.txt
# Euroc数据集双目--MH03序列参数
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /home/guofeng/桌面/Database/Euroc/mav0/cam0/data /home/guofeng/桌面/Database/Euroc/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/MH03.txt
#TUM数据集单目--TUM1相机参数
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/guofeng/桌面/Database/TUM/data
#TUM数据集RGB-D深度相机--TUM1相机参数
#注意要先使用下面命令转换
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /home/guofeng/桌面/Database/TUM/data /home/guofeng/桌面/Database/TUM/associations.txt
#Kitti数据集单目--KITTI00-02相机内参,02序列图像
./Examples/Monocular/mono_kitti Vocabulary/ORBvoc.txt Examples/Monocular/KITTI00-02.yaml /home/guofeng/桌面/Database/KITTI/dataset/sequences/02
#Kitti数据集双目--KITTI00-02相机内参,02序列图像
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTIX.yaml /home/guofeng/桌面/Database/KITTI/dataset/sequences/02
2. ROS版本运行测试
roscore
# EuRoC单目, 运行EuRoc单目目ROS数据包,发送图像信息
rosbag play --pause V1_01_easy.bag /cam0/image_raw:=/camera/image_raw
rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml
# EuRoC双目, 运行EuRoc双目ROS数据包,发送图像信息
rosbag play --pause V1_01_easy.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml true
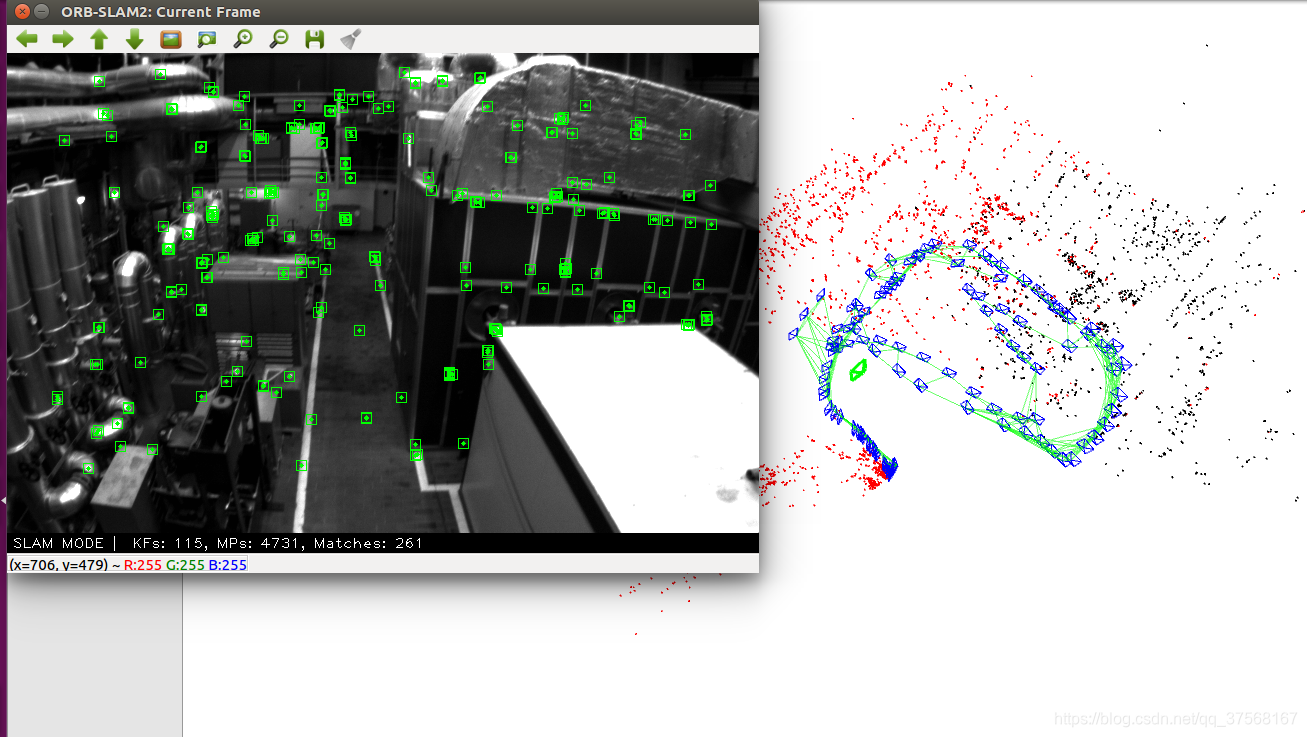
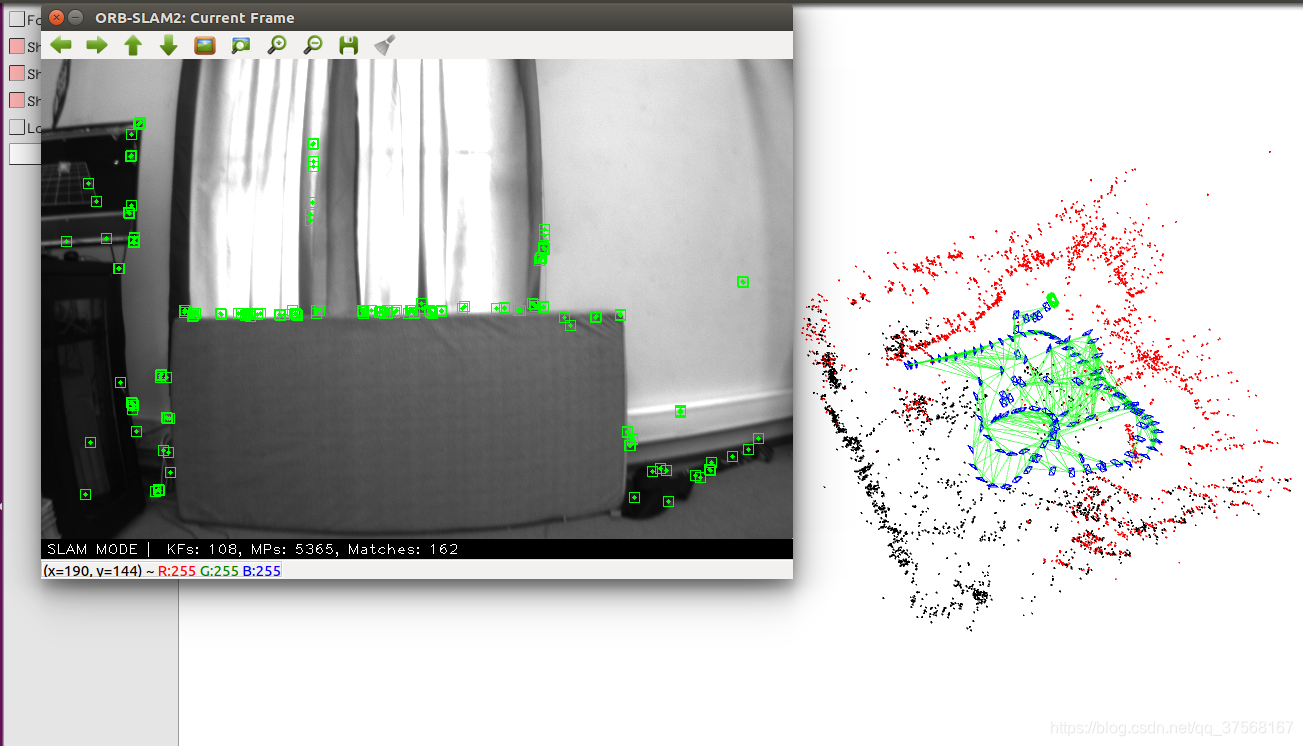
1.4 测试结果
- 单目EuRoc (非ROS版本)
- 单目EuRoc (ROS版本)
2. 出现的问题及解决方案
2.1 cv_bridge问题
- 问题描述
[rospack] Error: package 'ORB_SLAM2' depends on non-existent package 'cv_bridge' and rosdep claims that it is not a system dependency. Check the ROS_PACKAGE_PATH or try calling 'rosdep update'
- 解决方案
# ROS缺少依赖包cv_bridge,作用是ROS发布的图像消息和opencv的图像Mat矩阵形式的转换桥梁;
$sudo apt-get install ros-kinetic-cv-bridge
2.2 链接库问题
- 问题描述
/usr/bin/ld: CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
/usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line
collect2: error: ld returned 1 exit status
CMakeFiles/RGBD.dir/build.make:217: recipe for target '../RGBD' failed
make[2]: *** [../RGBD] Error 1
CMakeFiles/Makefile2:67: recipe for target 'CMakeFiles/RGBD.dir/all' failed
make[1]: *** [CMakeFiles/RGBD.dir/all] Error 2
make[1]: *** 正在等待未完成的任务....
/usr/bin/ld: CMakeFiles/Stereo.dir/src/ros_stereo.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
/usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line
collect2: error: ld returned 1 exit status
CMakeFiles/Stereo.dir/build.make:217: recipe for target '../Stereo' failed
make[2]: *** [../Stereo] Error 1
CMakeFiles/Makefile2:104: recipe for target 'CMakeFiles/Stereo.dir/all' failed
make[1]: *** [CMakeFiles/Stereo.dir/all] Error 2
Makefile:127: recipe for target 'all' failed
make: *** [all] Error 2
- 解决方案
# 打开ORB_SLAM2/Examples/ROS/ORB_SLAM2目录下的CMakeLists.txt文件.在set中增加 -lboost_system, 具体修改如下:
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
-lboost_system
)
3. 后续计划
后续将开始阅读视觉位置识别方向的文献,主要是从图像和点云两方面进行拓展研究,包括但不限于图像检索,点云检索,闭环检测验证,关键点匹配等.














 1602
1602











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









