







PX4 EKF simulink仿真程序解析(一)——初始化
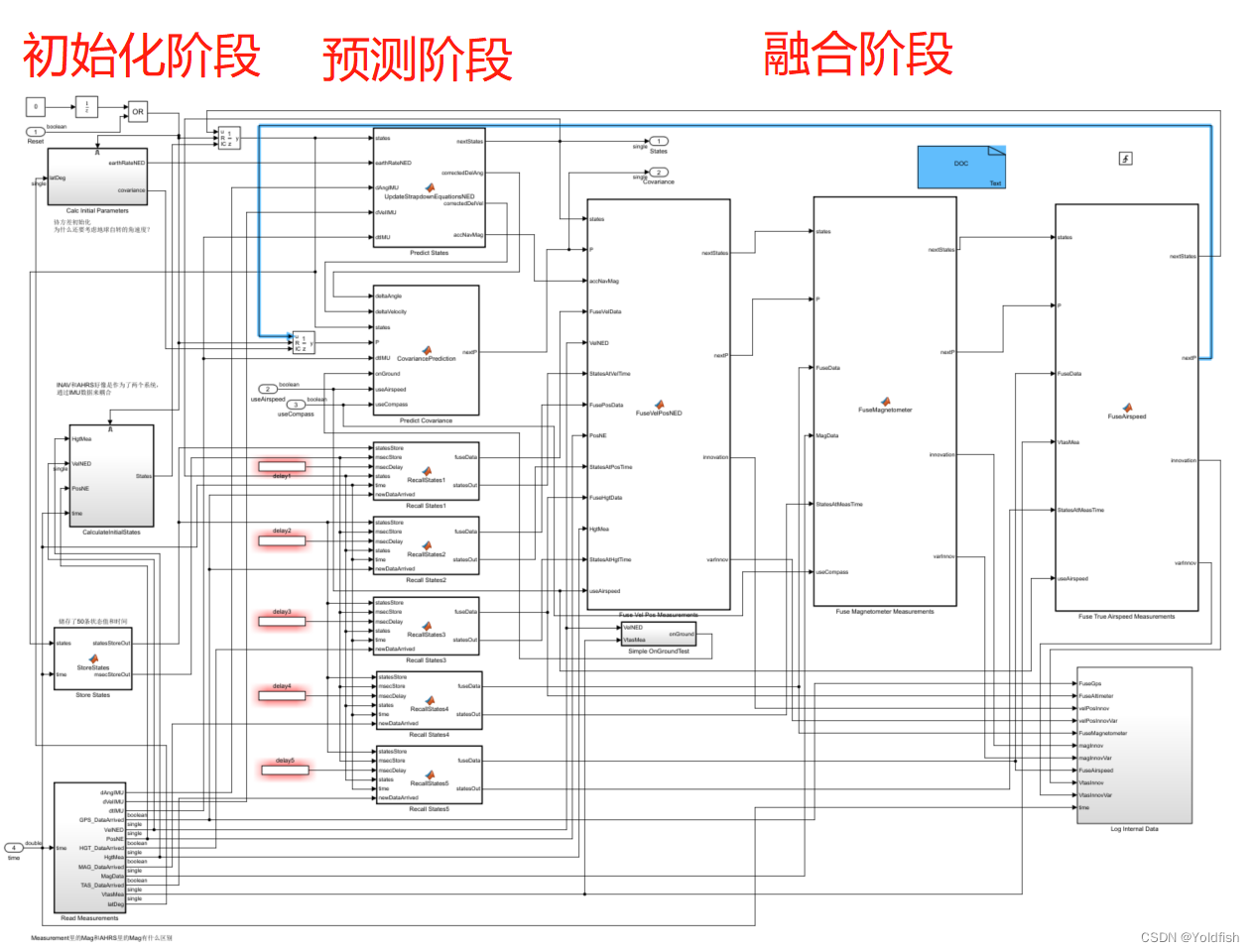
整体框架如下:
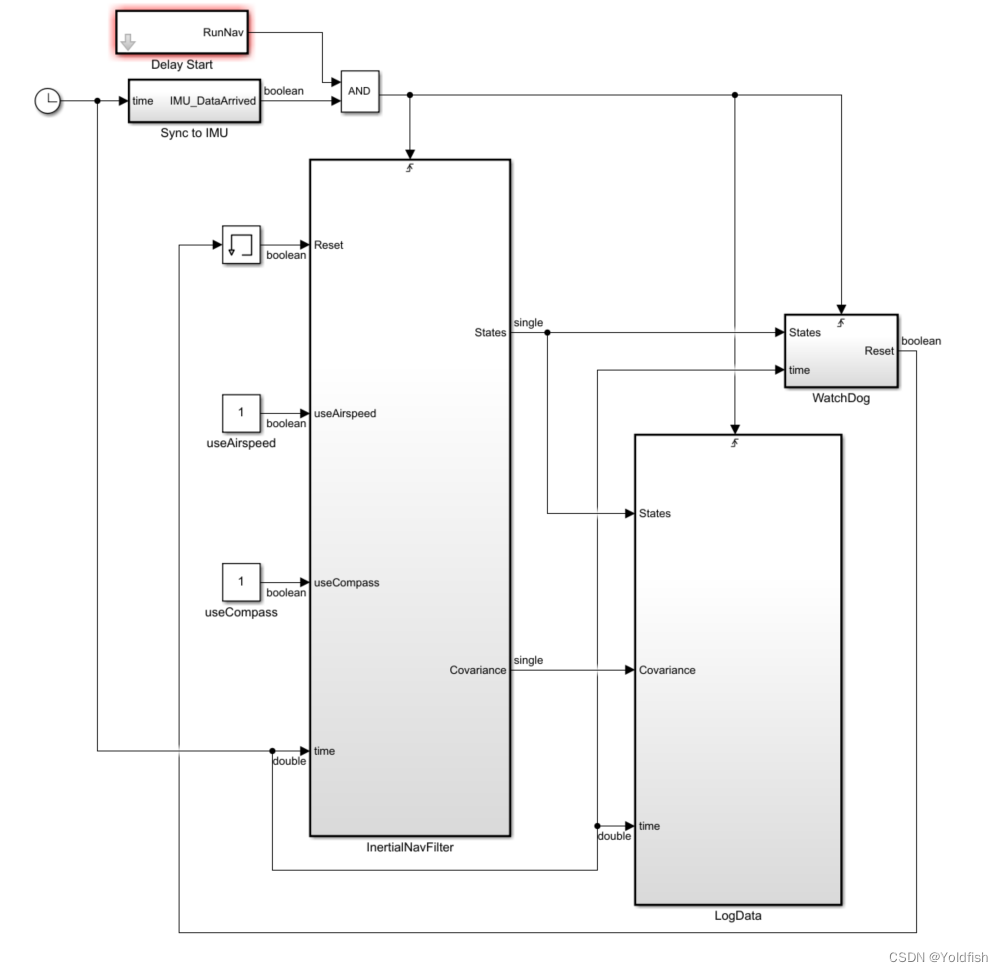
进入InertialNavFliter,整体框架如下:
初始化过程包括协方差初始化、状态向量初始化。其中包括测量值的处理和地球自转角速度的处理。
先来看协方差初始化及地球自转角速度的处理:
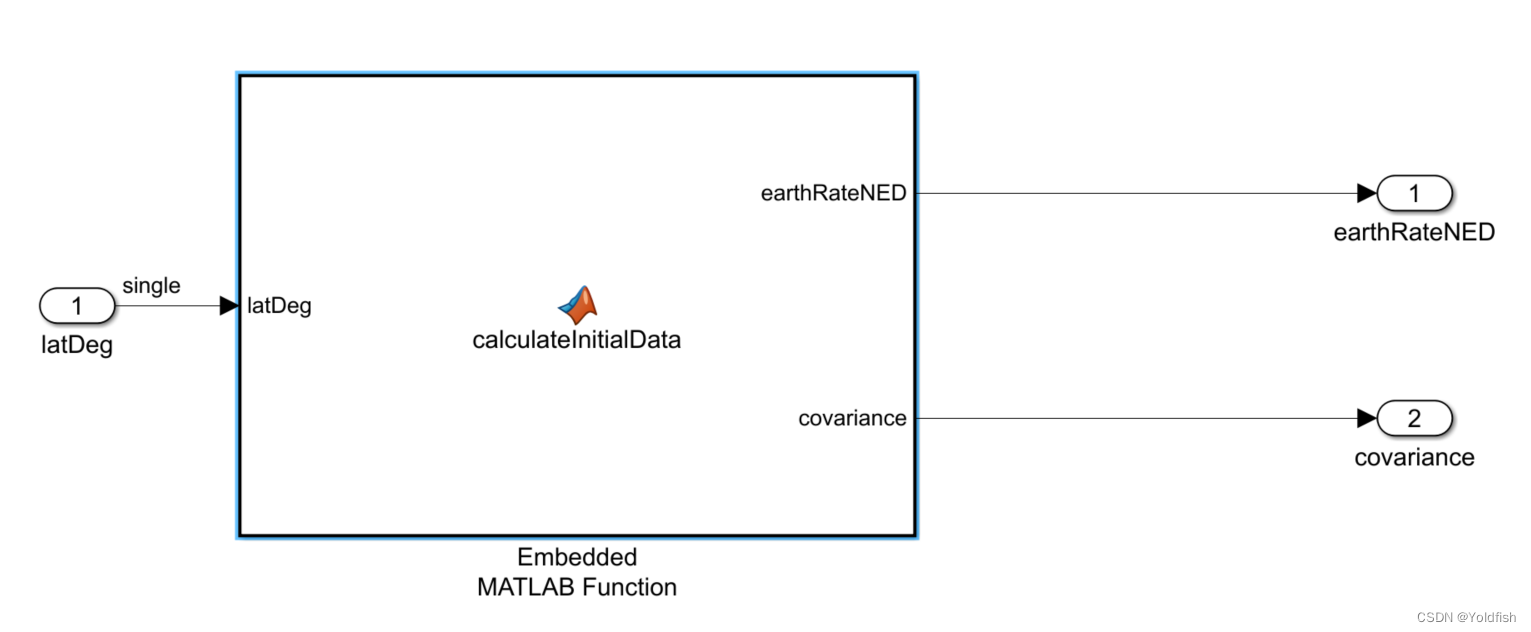
这个部分的输入只有飞机所处的纬度数据,输出初始化后的P和地球自转向量,详细如下:
function [earthRateNED, covariance] = calculateInitialData(latDeg)
%#codegen
% 转弧度角系数
deg2rad = single(pi/180);
% Define the initial Euler angle covariance (Phi, Theta, Psi)
%角度协方差初始化,航向角要大几个数量级
InitialEulerCovariance = single([(1.0*pi/180); (1.0*pi/180); (10.0*pi/180)].^2);
% Define the transformation vector from a 321 sequence Euler rotation vector to a q0,...,q3 quaternion vector
% linearised around a level orientation (roll,pitch = 0,0)
%按照321的顺序旋转,转换四元数矩阵,
%因为欧拉转四元数是非线性的,所以用到了雅可比矩阵求偏导Jaccobian(Q,Euler)
% Q = 【1,0.5*roll,0.5*pitch,0.5*yaw】,这里的角是极小值
J_eul2quat = ...
single([[ 0.0, 0.0, 0.0]; ...
[ 0.5, 0.0, 0.0]; ...
[ 0.0, 0.5, 0.0]; ...
[ 0.0, 0.0, 0.5]]);
% Form the covariance matrix for the intial Euler angle coordinates
%对角化矩阵
angleCov = diag(InitialEulerCovariance);
% Transform the Euler angle covariances into the equivalent quaternion covariances
%四元数协方差,
quatCov = J_eul2quat*angleCov*transpose(J_eul2quat);
% define the state covariances with the exception of the quaternion covariances
%初始化赋值,可以看到这里位置的初始化误差很大
Sigma_vel_NE = single(0.7); % 1 sigma uncertainty in horizontal velocity components
Sigma_vel_D = single(0.7); % 1 sigma uncertainty in vertical velocity
Sigma_pos_NE = single(15); % 1 sigma uncertainty in horizontal position components
Sigma_pos_D = single(5.0); % 1 sigma uncertainty in vertical position
Sigma_dAng = single(1/10*pi/180*0.02); % 1 Sigma uncertainty in delta angle bias
Sigma_dVel = single(0.1*0.02); % 1 Sigma uncertainty in delta velocity bias
Sigma_wind = single(8);
Sigma_MagNED = single(20);
Sigma_MagXYZ = single(20);
covariance = single(diag([0;0;0;0;Sigma_vel_NE*[1;1];Sigma_vel_D;Sigma_pos_NE*[1;1];Sigma_pos_D;Sigma_dAng*[1;1;1];Sigma_dVel*[1;1;1];Sigma_wind*[1;1];Sigma_MagNED*[1;1;1];Sigma_MagXYZ*[1;1;1]].^2));
% Add the quaternion covariances
%完成协方差初始化
covariance(1:4,1:4) = quatCov;
%Define Earth rotation vector in the NED navigation frame
%地球旋转矢量,7.2921这个是地球自转角速度rad/s
%latDeg是维度
earthRateECEF = single([0; 0; 7.2921e-005]);
%简单地将真北向量分解到ND上
earthRateNED = ...
single([cos(latDeg*deg2rad)*earthRateECEF(3); ...
0; ...
-sin(latDeg*deg2rad)*earthRateECEF(3)]);
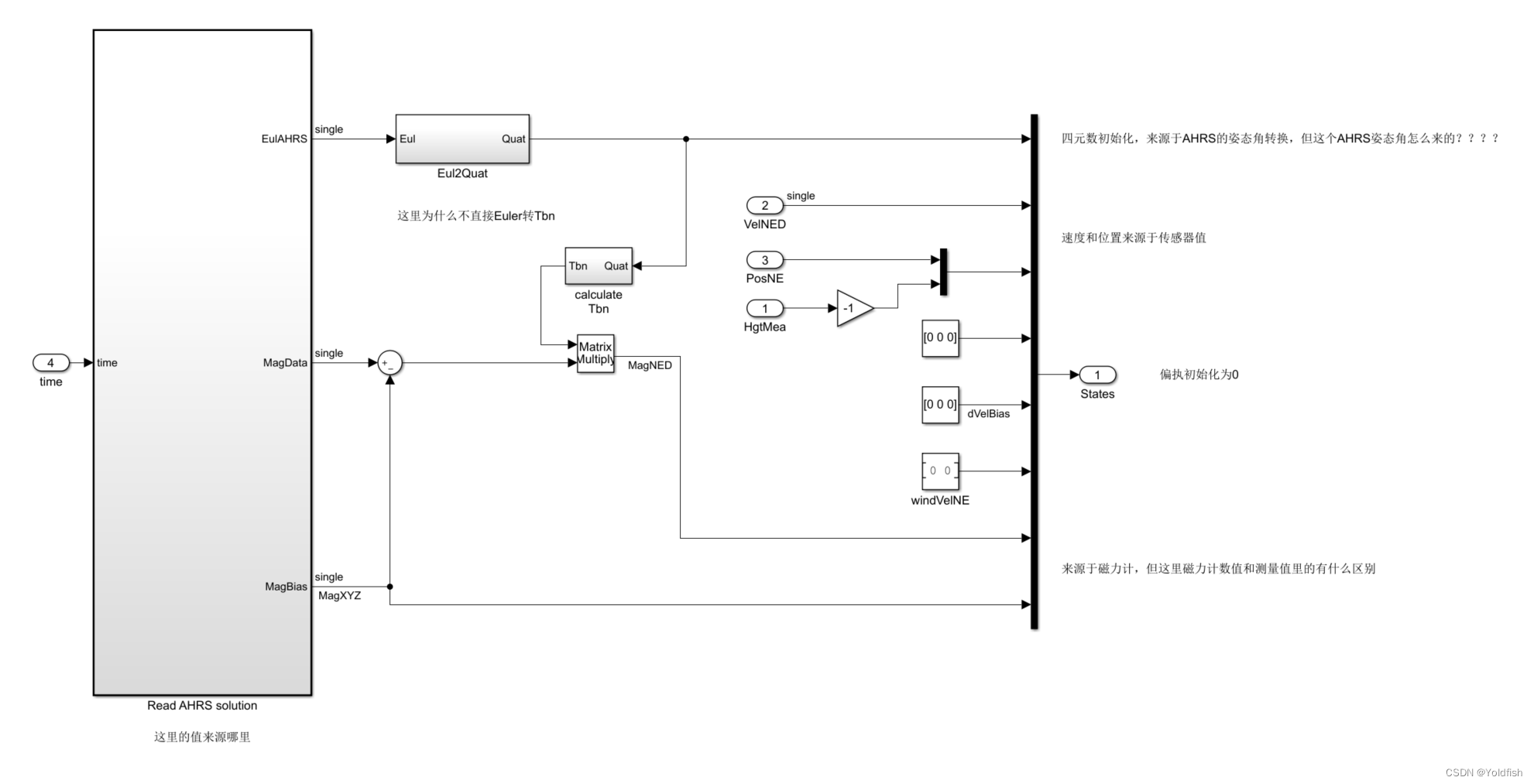
Euler角度怎么获取的还不清楚,四元数由AHRS的欧拉角转换得到,速度和位置由测量值得到,偏置和风速初始化为0,NEDMag来源于磁力计数据Tbn - Mag偏置得到,但是MagXYZ(也就是偏置)暂时不知道怎么得到的。
状态值储存模块:Store States储存了50个时间步的数据,用一个2450的矩阵保存,按1-50列的顺序循环刷新数据,同时记录了对应的时间戳,代码如下:
%#codegen
function [statesStoreOut,msecStoreOut] = StoreStates(states,time)
% 记录了50条状态值,和对应的时间。 % 0.05s
persistent statesStore;
if isempty(statesStore)
statesStore = single(zeros(24,50));
end
persistent index;
if isempty(index)
index = 1;
end
persistent msecStore;
if isempty(msecStore)
msecStore = uint32(zeros(1,50));
end
if (index > 50)
index = 1;
end
for i=1:24
statesStore(i,index) = states(i);
end
% round 是四舍五入
msecStore(index) = round(time*1000);
index = index + 1;
statesStoreOut = statesStore;
msecStoreOut = msecStore;
end
测量值预处理整体框架如下:

做了手动开关等处理,这里不多描述工程相关,只梳理算法流程。做了处理的有GPS数据和IMU数据,GPS的处理如下:主要得到水平位置和NED速度
%#codegen
function [VelNED,PosNE] = ConvertGpsData(GPS_DataArrived,RefLatLongDeg,LatLongDeg,GndSpd,CourseDeg,VelD)
% Do a conversion from lat,long to local North.Est position relative to a
% reference point using WGS-84 eaerth radius and using a simple spherical
% earth model
% Convert GPS course and speed to North and East velocity components
deg2rad = single(pi/180);
earthRadius = single(6378145); %地球半径/米
PosNE = single(zeros(2,1));
VelNED = single(zeros(3,1));
% 当前经纬度减home点的角度,地球半径×弧度角得到相对于原点的距离
%这里分解成home点NE
LatLongDelta = (LatLongDeg-RefLatLongDeg) * deg2rad;
PosNE(1) = earthRadius * LatLongDelta(1);
PosNE(2) = earthRadius * cos(RefLatLongDeg(1)*deg2rad) * LatLongDelta(2);
%水平速X航向角,%航向角是怎么得到的?
VelNED(1) = GndSpd*cos(CourseDeg*deg2rad);
VelNED(2) = GndSpd*sin(CourseDeg*deg2rad);
VelNED(3) = VelD;
return
IMU处理如下:主要通过梯形积分得到增量角度和速度
%#codegen
function [delAngIMU,delVelIMU] = CalcDeltaAngVel(angRateIMU, accelIMU, dtIMU)
%persistent意味着不需要对其初始化,被定义的变量在函数运行结束后不会被清除
persistent prevAngRateIMU;
if isempty(prevAngRateIMU)
prevAngRateIMU = single([0;0;0]);
end
persistent prevAccelIMU;
if isempty(prevAccelIMU)
prevAccelIMU = single([0;0;0]);
end
% Apply trapezoidal integration
%梯形积分得到Δ角和速度
delAngIMU = 0.5*dtIMU*(angRateIMU + prevAngRateIMU);
delVelIMU = 0.5*dtIMU*(accelIMU + prevAccelIMU );
prevAngRateIMU = angRateIMU;
prevAccelIMU = accelIMU;
end
到此,经过处理的数据梳理完毕,其他的都未预处理,直接输出到后续步骤当中。
















 616
616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











