







引言
源码:https://github.com/nmwsharp/diffusion-net
论文:DiffusionNet: Discretization Agnostic Learning on Surfaces
相对来说效果好、速度快、占用内(显)存小、使用简单…今年(2022年)刚发表在TOG上.
一、方法简述
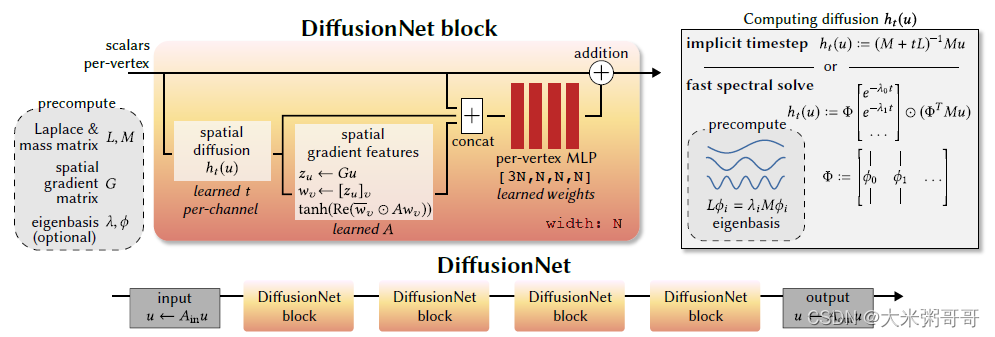
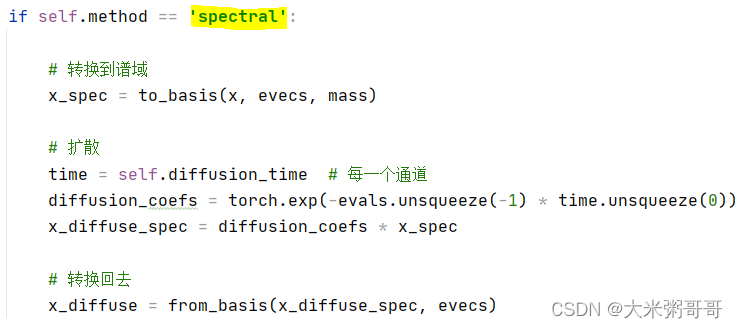
个人感觉:DiffusionNet1核心是其代码中的一句注释 Applies diffusion with learned per-channel t
将传统算法,推广到深度学习的领域 - 将传统算法的参数变为可学习的参数 (卷积也是这样.大多数的网络都是基于或者说来源于传统方法,对传统方法进行建模,对某些特定参数进行学习)数学真的蛮重要....
1.1 输入
网络的输入:xyz坐标 or hks特征 + 梯度特征

1.2 网络
核心部分:
- 大致框架:前面线性层,后面线性层,中间
Block叠加

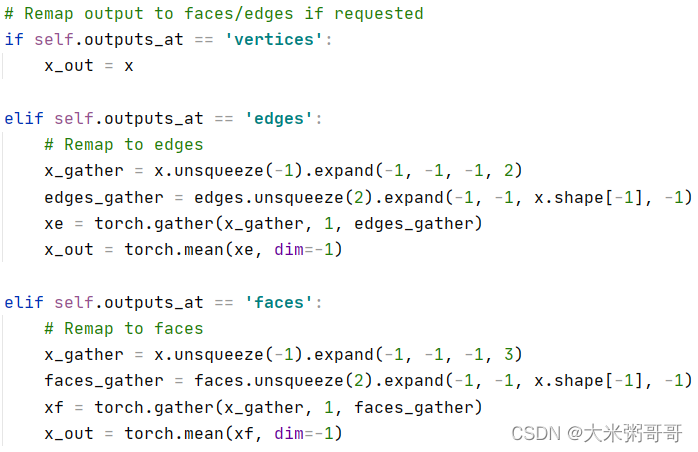
- 最后的
点、边、面特征转换 (比我写的转换代码优雅很多)
DiffusionNetBlock中主要三个部分 LearnedTimeDiffusion、SpatialGradientFeatures 和 MiniMLP
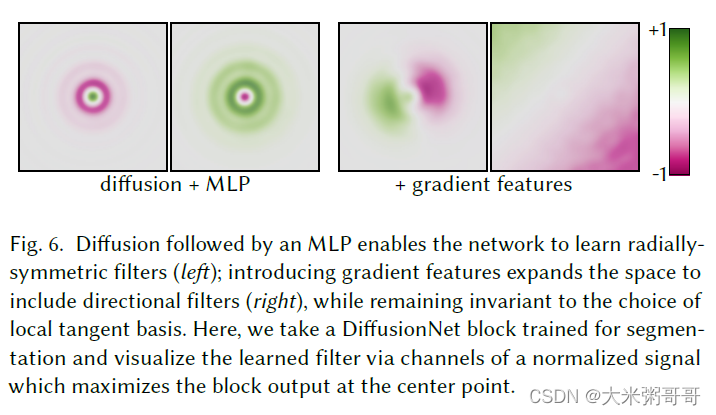
作者对于DiffusionNetBlock的分析与可视化:
The last building block in our method enables a larger space of filters by computing additional features from the spatial gradients of signal values at vertices (
用卷积的话来说就是感受野更大了):
1.3 损失函数
分类和分割所用的损失函数不一样
分类:标签平滑 label_smoothing_log_loss(preds, labels, label_smoothing_fac)
分割:交叉熵 - torch.nn.functional.nll_loss(preds, labels)
二、分类实验
分类数据集请参考:【三维几何学习】 三角网格(Triangular Mesh)分类数据集
2.1 结果
| input \ width | 32 | 64 | 128 | 256 |
|---|---|---|---|---|
| hks | - | 78.723 | - | - |
| xyz | - | 85.562 | - | - |
diffusionNet_cubes_hks_64截图,服务器上时间波动较大 训练(10-34)it/s 测试(20-58)it/s
特征通道C_Width = 64,在Cubes上略过拟合,C_Width = 32准确率不到70%..C_Width大点可能能提点
2.2 代码
cubes_dataset.py
import shutil
import os
import sys
import random
import numpy as np
import torch
from torch.utils.data import Dataset
import potpourri3d as pp3d
sys.path.append(os.path.join(os.path.dirname(__file__), "../../")) # add the path to the DiffusionNet src
import src.diffusion_net as diffusion_net
from src.diffusion_net.utils import toNP
def is_mesh_file(filename):
return any(filename.endswith(extension) for extension in ['.obj', 'off'])
class CubesDataset(Dataset):
def __init__(self, root_dir, phase, k_eig, op_cache_dir=None):
self.root_dir = root_dir
self.k_eig = k_eig
self.op_cache_dir = op_cache_dir
self.classes, self.class_to_idx = self.find_classes(self.root_dir)
self.paths = self.make_dataset_by_class(self.root_dir, self.class_to_idx, phase)
self.n_class = len(self.classes)
def __len__(self):
return len(self.paths)
def __getitem__(self, index):
path = self.paths[index][0] # 路径
label = self.paths[index][1] # 类别 标签
verts, faces = pp3d.read_mesh(path)
verts = torch.tensor(verts).float()
faces = torch.tensor(faces)
label = torch.tensor(label)
frames, mass, L, evals, evecs, gradX, gradY = diffusion_net.geometry.get_operators(verts, faces, k_eig=self.k_eig, op_cache_dir=self.op_cache_dir)
return verts, faces, frames, mass, L, evals, evecs, gradX, gradY, label
@staticmethod
def find_classes(dirs):
classes = [d for d in os.listdir(dirs) if os.path.isdir(os.path.join(dirs, d))]
classes.sort()
class_to_idx = {classes[i]: i for i in range(len(classes))}
return classes, class_to_idx
@staticmethod
def make_dataset_by_class(dirs, class_to_idx, phase):
meshes = []
dirs = os.path.expanduser(dirs)
for target in sorted(os.listdir(dirs)):
d = os.path.join(dirs, target)
if not os.path.isdir(d):
continue
for root, _, fnames in sorted(os.walk(d)):
for fname in sorted(fnames):
if is_mesh_file(fname) and (root.count(phase) == 1):
path = os.path.join(root, fname)
item = (path, class_to_idx[target])
meshes.append(item)
return meshes
classification_cubes.py
import os
import sys
import argparse
import torch
from torch.utils.data import DataLoader
from tqdm import tqdm
sys.path.append(os.path.join(os.path.dirname(__file__), "../../"))
import src.diffusion_net as diffusion_net
from experiments.cls_cubes_500.cubes_dataset import CubesDataset
# Parse a few args
parser = argparse.ArgumentParser()
parser.add_argument("--input_features", type=str, help="('xyz' or 'hks')", default='hks')
parser.add_argument("--features_width", type=int, choices={32, 64, 128, 256}, default=128)
args = parser.parse_args()
# system things
device = torch.device('cuda:0')
dtype = torch.float32
input_features = args.input_features # one of ['xyz', 'hks'] # model
C_width = args.features_width
k_eig = 128
n_epoch = 200
lr = 1e-3
decay_every = 50
decay_rate = 0.5
augment_random_rotate = (input_features == 'xyz')
label_smoothing_fac = 0.2
# === Load datasets
base_path = os.path.dirname(__file__)
dataset_path = os.path.join(base_path, "data", "cubes") # 数据集路径
op_cache_dir = os.path.join(base_path, "data", "op_cache") # 缓存路径
# Train dataset
train_dataset = CubesDataset(dataset_path, 'train', k_eig=k_eig, op_cache_dir=op_cache_dir)
train_loader = DataLoader(train_dataset, batch_size=None, shuffle=True)
# Test dataset
test_dataset = CubesDataset(dataset_path, 'test', k_eig=k_eig, op_cache_dir=op_cache_dir)
test_loader = DataLoader(test_dataset, batch_size=None)
n_class = train_dataset.n_class
# === Create the model
C_in={'xyz': 3, 'hks': 16}[input_features] # dimension of input features
model = diffusion_net.layers.DiffusionNet(C_in=C_in,
C_out=n_class,
C_width=C_width,
N_block=4,
last_activation=lambda x : torch.nn.functional.log_softmax(x,dim=-1),
outputs_at='global_mean',
dropout=False)
model = model.to(device)
# === Optimize
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
def train_epoch(epoch):
# Implement lr decay
if epoch > 0 and epoch % decay_every == 0:
global lr
lr *= decay_rate
for param_group in optimizer.param_groups:
param_group['lr'] = lr
# Set model to 'train' mode
model.train()
optimizer.zero_grad()
correct = 0
total_num = 0
for data in tqdm(train_loader):
# Get data
verts, faces, frames, mass, L, evals, evecs, gradX, gradY, labels = data
# Move to device
verts = verts.to(device)
faces = faces.to(device)
frames = frames.to(device)
mass = mass.to(device)
L = L.to(device)
evals = evals.to(device)
evecs = evecs.to(device)
gradX = gradX.to(device)
gradY = gradY.to(device)
labels = labels.to(device)
# Randomly rotate positions
if augment_random_rotate:
verts = diffusion_net.utils.random_rotate_points(verts)
# Construct features
if input_features == 'xyz':
features = verts
elif input_features == 'hks':
features = diffusion_net.geometry.compute_hks_autoscale(evals, evecs, 16)
# Apply the model
preds = model(features, mass, L=L, evals=evals, evecs=evecs, gradX=gradX, gradY=gradY, faces=faces)
# Evaluate loss
loss = diffusion_net.utils.label_smoothing_log_loss(preds, labels, label_smoothing_fac)
loss.backward()
# track accuracy
pred_labels = torch.max(preds, dim=-1).indices
this_correct = pred_labels.eq(labels).sum().item()
correct += this_correct
total_num += 1
# Step the optimizer
optimizer.step()
optimizer.zero_grad()
train_acc = correct / total_num
return train_acc
# Do an evaluation pass on the test dataset
def test():
model.eval()
correct = 0
total_num = 0
with torch.no_grad():
for data in tqdm(test_loader):
# Get data
verts, faces, frames, mass, L, evals, evecs, gradX, gradY, labels = data
# Move to device
verts = verts.to(device)
faces = faces.to(device)
frames = frames.to(device)
mass = mass.to(device)
L = L.to(device)
evals = evals.to(device)
evecs = evecs.to(device)
gradX = gradX.to(device)
gradY = gradY.to(device)
labels = labels.to(device)
# Construct features
if input_features == 'xyz':
features = verts
elif input_features == 'hks':
features = diffusion_net.geometry.compute_hks_autoscale(evals, evecs, 16)
# Apply the model
preds = model(features, mass, L=L, evals=evals, evecs=evecs, gradX=gradX, gradY=gradY, faces=faces)
# track accuracy
pred_labels = torch.max(preds, dim=-1).indices
this_correct = pred_labels.eq(labels).sum().item()
correct += this_correct
total_num += 1
test_acc = correct / total_num
return test_acc
print("Training...")
for epoch in range(n_epoch):
train_acc = train_epoch(epoch)
test_acc = test()
print("Epoch {} - Train overall: {:06.3f}% Test overall: {:06.3f}%".format(epoch, 100*train_acc, 100*test_acc))
# Test
test_acc = test()
print("Overall test accuracy: {:06.3f}%".format(100*test_acc))
三、分割实验
3.1 结果
| input \ width | 32 | 64 | 128 | 256 |
|---|---|---|---|---|
| hks | 80.393 | 78.496 | 78.533 | 80.304 |
| xyz | 83.200 | 82.544 | 81.026 | - |

过拟合严重,训练中可到84+,C_width = 16 可以85% ... 减C_width还可以提点 但没有达到论文里的90%
github上的提问 (截止到目前还无回复):Segmentation on the simplified human dataset (face label)
以下数据集使用xyz作为输入,网络不收敛... Aliens(32)只有30%
| input \ width | 32 | 64 | 128 | 256 |
|---|---|---|---|---|
| hks | 66.190 | 70.574 | 69.721 | 54.891 |
| input \ width | 32 | 64 | 128 | 256 |
|---|---|---|---|---|
| hks | - | 96.873 | - | 96.730 |
| input \ width | 32 | 64 | 128 | 256 |
|---|---|---|---|---|
| hks | - | 35.000 | - | 66.262 |
3.2 代码
注意修改n_class和路径
coseg_seg_dataset.py
import shutil
import os
import sys
import random
import numpy as np
import torch
from torch.utils.data import Dataset
import potpourri3d as pp3d
sys.path.append(os.path.join(os.path.dirname(__file__), "../../")) # add the path to the DiffusionNet src
import src.diffusion_net as diffusion_net
def is_mesh_file(filename):
return any(filename.endswith(extension) for extension in ['.obj', 'off'])
class CosegDataset(Dataset):
def __init__(self, root_dir, phase, k_eig=128, op_cache_dir=None):
self.k_eig = k_eig
self.root_dir = root_dir
self.cache_dir = os.path.join(root_dir, "cache")
self.op_cache_dir = op_cache_dir
self.dir = os.path.join(self.root_dir, phase)
self.paths = self.make_dataset(self.dir)
self.seg_paths = self.get_seg_files(self.paths, os.path.join(self.root_dir, 'seg'))
def __len__(self):
return len(self.paths)
def __getitem__(self, index):
path = self.paths[index] # 路径
label = np.loadtxt(open(self.seg_paths[index], 'r'), dtype='float64')
verts, faces = pp3d.read_mesh(path)
verts = torch.tensor(verts).float()
faces = torch.tensor(faces)
label = torch.tensor(label).long()
frames, mass, L, evals, evecs, gradX, gradY = diffusion_net.geometry.get_operators(verts, faces,
k_eig=self.k_eig,
op_cache_dir=self.op_cache_dir)
return verts, faces, frames, mass, L, evals, evecs, gradX, gradY, label
@staticmethod
def get_seg_files(paths, seg_dir, seg_ext='.eseg'):
segs = []
for path in paths:
segfile = os.path.join(seg_dir, os.path.splitext(os.path.basename(path))[0] + seg_ext)
assert (os.path.isfile(segfile))
segs.append(segfile)
return segs
@staticmethod
def make_dataset(path):
meshes = []
assert os.path.isdir(path), '%s is not a valid directory' % path
for root, _, fnames in sorted(os.walk(path)):
for fname in fnames:
if is_mesh_file(fname):
path = os.path.join(root, fname)
meshes.append(path)
return meshes
seg_coseg.py
import os
import sys
import argparse
import torch
from torch.utils.data import DataLoader
from tqdm import tqdm
sys.path.append(os.path.join(os.path.dirname(__file__), "../../")) # add the path to the DiffusionNet src
import src.diffusion_net as diffusion_net
from experiments.seg_coseg.coseg_seg_dataset import CosegDataset
# Parse a few args
parser = argparse.ArgumentParser()
parser.add_argument("--input_features", type=str, help="('xyz' or 'hks')", default='hks')
parser.add_argument("--features_width", type=int, choices={32, 64, 128, 256}, default=128)
parser.add_argument("--data_name", type=str, choices={'aliens', 'vases', 'chairs'}, default='vases')
args = parser.parse_args()
# system things
device = torch.device('cuda:0')
dtype = torch.float32
input_features = args.input_features # one of ['xyz', 'hks']
C_width = args.features_width
k_eig = 128
n_epoch = 200
lr = 1e-3
decay_every = 50
decay_rate = 0.5
augment_random_rotate = (input_features == 'xyz')
# === Load datasets
data_name = args.data_name # aliens vases chairs
base_path = os.path.dirname(__file__)
op_cache_dir = os.path.join(base_path, "data", "op_cache", data_name)
dataset_path = os.path.join(base_path, "data", data_name)
n_class = 4
# Load the test dataset
test_dataset = CosegDataset(dataset_path, 'test', k_eig=k_eig, op_cache_dir=op_cache_dir)
test_loader = DataLoader(test_dataset, batch_size=None)
# Load the train dataset
train_dataset = CosegDataset(dataset_path, 'train', k_eig=k_eig, op_cache_dir=op_cache_dir)
train_loader = DataLoader(train_dataset, batch_size=None, shuffle=True)
# === Create the model
C_in={'xyz': 3, 'hks': 16}[input_features] # dimension of input features
model = diffusion_net.layers.DiffusionNet(C_in=C_in,
C_out=n_class,
C_width=C_width,
N_block=4,
last_activation=lambda x : torch.nn.functional.log_softmax(x, dim=-1),
outputs_at='faces',
dropout=True)
model = model.to(device)
# === Optimize
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
def train_epoch(epoch):
# Implement lr decay
if epoch > 0 and epoch % decay_every == 0:
global lr
lr *= decay_rate
for param_group in optimizer.param_groups:
param_group['lr'] = lr
# Set model to 'train' mode
model.train()
optimizer.zero_grad()
correct = 0
total_num = 0
for data in tqdm(train_loader):
# Get data
verts, faces, frames, mass, L, evals, evecs, gradX, gradY, labels = data
# Move to device
verts = verts.to(device)
faces = faces.to(device)
frames = frames.to(device)
mass = mass.to(device)
L = L.to(device)
evals = evals.to(device)
evecs = evecs.to(device)
gradX = gradX.to(device)
gradY = gradY.to(device)
labels = labels.to(device)
# Randomly rotate positions
if augment_random_rotate:
verts = diffusion_net.utils.random_rotate_points(verts)
# Construct features
if input_features == 'xyz':
features = verts
elif input_features == 'hks':
features = diffusion_net.geometry.compute_hks_autoscale(evals, evecs, 16)
# Apply the model
preds = model(features, mass, L=L, evals=evals, evecs=evecs, gradX=gradX, gradY=gradY, faces=faces)
# Evaluate loss
loss = torch.nn.functional.nll_loss(preds, labels)
loss.backward()
# track accuracy
pred_labels = torch.max(preds, dim=1).indices
this_correct = pred_labels.eq(labels).sum().item()
this_num = labels.shape[0]
correct += this_correct
total_num += this_num
# Step the optimizer
optimizer.step()
optimizer.zero_grad()
train_acc = correct / total_num
return train_acc
# Do an evaluation pass on the test dataset
def test():
model.eval()
correct = 0
total_num = 0
with torch.no_grad():
for data in tqdm(test_loader):
# Get data
verts, faces, frames, mass, L, evals, evecs, gradX, gradY, labels = data
# Move to device
verts = verts.to(device)
faces = faces.to(device)
frames = frames.to(device)
mass = mass.to(device)
L = L.to(device)
evals = evals.to(device)
evecs = evecs.to(device)
gradX = gradX.to(device)
gradY = gradY.to(device)
labels = labels.to(device)
# Construct features
if input_features == 'xyz':
features = verts
elif input_features == 'hks':
features = diffusion_net.geometry.compute_hks_autoscale(evals, evecs, 16)
# Apply the model
preds = model(features, mass, L=L, evals=evals, evecs=evecs, gradX=gradX, gradY=gradY, faces=faces)
# track accuracy
pred_labels = torch.max(preds, dim=1).indices
this_correct = pred_labels.eq(labels).sum().item()
this_num = labels.shape[0]
correct += this_correct
total_num += this_num
test_acc = correct / total_num
return test_acc
print("Training...")
for epoch in range(n_epoch):
train_acc = train_epoch(epoch)
test_acc = test()
print("Epoch {} - Train overall: {:06.3f}% Test overall: {:06.3f}%".format(epoch, 100*train_acc, 100*test_acc))
# Test
test_acc = test()
print("Overall test accuracy: {:06.3f}%".format(100*test_acc))
四、一些想法
DiffusionNet本身有一些局限性 (不确定batch_size>1效果会怎么样),在一些数据集上的准确率并不尽人意… 感觉有改进的空间 可以尝试的一些方向:
4.1 输入
论文以顶点的xyz坐标和hks特征作为输入
- 尝试其他简单的几何特征,
面积、二面角、法向等 - 尝试其他谱域特征,比如:
wks
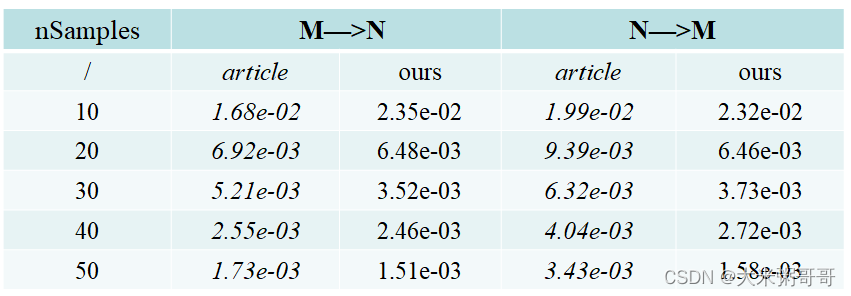
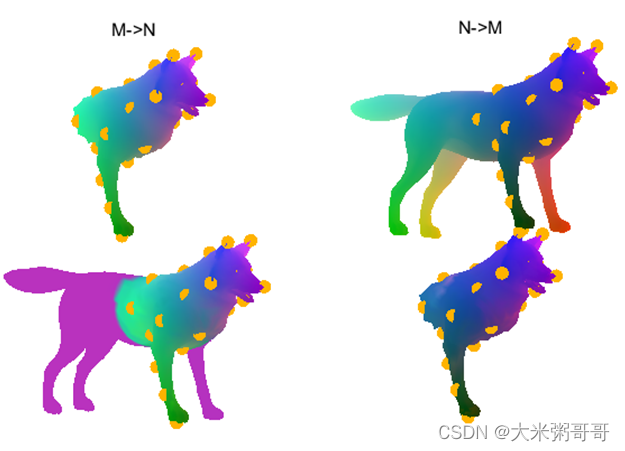
想到了之前复现的一篇论文,Wavelet-based Heat Kernel Derivatives: Towards Informative Localized Shape Analysis,当时改了改论文中的一些细节,结果如下:
4.2 网络
- 将DiffusionNetBlock作为
即插即用的Non-local模块,融合到ResNet中会怎么样 卷积+ DiffusionNetBlock orTransformer+ DiffusionNetBlock- 将DiffusionNetBlock 中的MLP改为基于点云的网络,比如
PointNet - 尝试batch_size>1,这时候激活函数改为
BN是否更好,或者用LN - … 很多idea可以尝试

















 1385
1385











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











