







本文参加新星计划人工智能(Pytorch)赛道:https://bbs.csdn.net/topics/613989052
从零开始网格上的深度学习-1:输入篇
引言
本文主要内容如下:
- 介绍
三角网格,以及其读取和特征计算 - 介绍Pytorch中的
DataLoader - 一个简单的
网格分类实验
一、概述
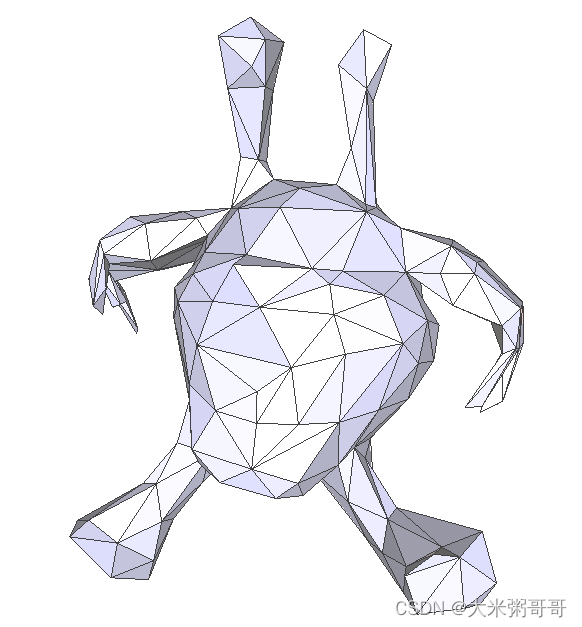
1.1 三角网格
三角网格是一种较为流形的3D模型表示方式:模型由多个三角形拼接而成,如上图所示。
- 可以简单将其看做是点、边、面的结合
本文将其面作为基本元素进行特征提取 - 相比点云或者体素等表示,其可以使用少量三角形表示更丰富的细节
可参考百度或1:一文搞懂三角网格(Triangle Mesh)
网格上的深度学习需要将这种不规则的表示转为标准的矩阵结构( 如:面的个数 × \times × 特征数)
1.2 DataLoader
训练或者测试神经网络,需要将数据输入到网络中,可以手动写代码去设置数据的batch_size,数据每轮训练完后是否要打乱顺序,数据的读取是否多线程以及数据是否对齐等等
DataLoader是一个很方便的库,完美的解决了以上问题,还可以继承进行自定义修改或增加功能
| 主要参数 | 参数说明 |
|---|---|
| dataset | 自定义数据集 |
| batch_size | 每个批次加载多少个样本,默认为1 |
| shuffle | 是否打乱数据顺序,默认False |
| collate_fn | 合并多个样本以形成一个Tensor用于输入 |
更多可参考官方文档或2:torch.utils.data.DataLoader()官方文档翻译
二、核心代码
2.1 读取Mesh,计算特征
数据集是SHREC’11 可参考三角网格(Triangular Mesh)分类数据集 或 MeshCNN
- obj文件的网格,前几行 v v v开头的是顶点坐标,后面 f f f开头的是顶点索引
- 每个网格由三个顶点 or 三条边组成,找到两个面共同的边 or 两个顶点,即可视为两个面相邻
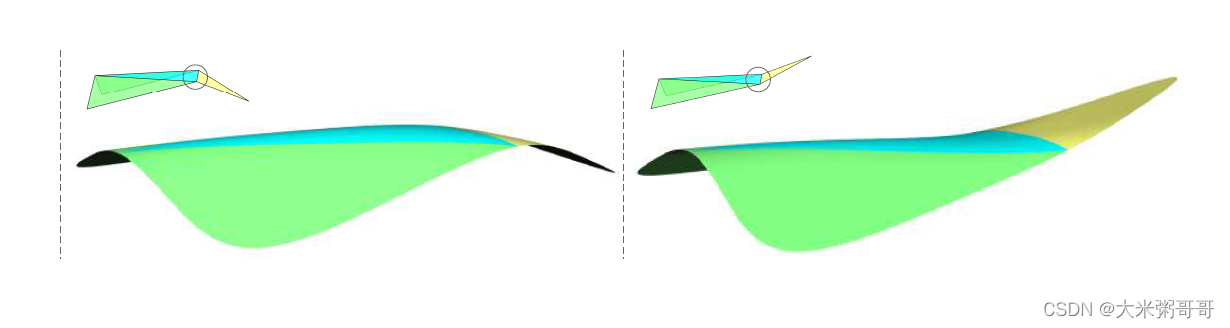
- 这里的特征是
网格面与其邻面的六个二面角:四个面两两成对 即有六个二面角(这里不考虑法向量朝向) 如果只输入三个二面角,下图中左右两个形状的输入是一样的,会有一定的歧义:
def __getitem__(self, index):
path = self.paths[index][0] # 路径
label = self.paths[index][1] # 类别 标签
# cache文件
filename, _ = os.path.splitext(path)
prefix = os.path.basename(filename)
cache = os.path.join(self.cache_dir, prefix + '.pkl')
if os.path.exists(cache): # 存在cache文件则直接读取
with open(cache, 'rb') as f:
meta = pickle.load(f)
else: # 不存在则读取obj文件,生成所需信息
mesh = Mesh()
f = open(path)
vs, faces = [], []
for line in f:
line = line.strip()
splitted_line = line.split()
if not splitted_line:
continue
elif splitted_line[0] == 'v':
vs.append([float(v) for v in splitted_line[1:4]])
elif splitted_line[0] == 'f':
face_vertex_ids = [int(c.split('/')[0]) for c in splitted_line[1:]]
assert len(face_vertex_ids) == 3
face_vertex_ids = [(ind - 1) if (ind >= 0) else (len(vs) + ind)
for ind in face_vertex_ids]
faces.append(face_vertex_ids)
f.close()
vs = np.asarray(vs)
faces = np.asarray(faces, dtype=int)
# 网格面的邻接矩阵
mesh_nb = [[] for _ in faces] # 初始化
edge_faces = dict() # 存储 (v,v):[f1,f2] 每条边所在面的序号
for face_id, face in enumerate(faces): # 遍历每一个face
edge_num = len(face) # 边的数量
for i in range(edge_num): # 遍历face中的每一个顶点 构造边
edge = (face[i], face[(i + 1) % edge_num]) # 构造边 (顶点序号,顶点序号)
edge = tuple(sorted(list(edge))) # 固定边的表示
if edge not in edge_faces: # 如果不存在这个key
edge_faces[edge] = [] # 相应key 新建空list
edge_faces[edge].append(face_id) # 存入此边对应的面的序号
for edge, face in edge_faces.items(): # 根据(v,v):[f1,f2] 即可知 f1 f2相邻
if len(face) == 2: # 一条边 对应两个face
mesh_nb[face[1]].append(face[0]) # 在对应face 中添加相邻face序号
mesh_nb[face[0]].append(face[1]) # 在对应face 中添加相邻face序号
for i in range(len(mesh_nb)):
if len(mesh_nb[i]) < 3: # 缺一个邻接面?
mesh_nb[i].append(i) # 填补自己
if len(mesh_nb[i]) < 3: # 缺两个邻接面?
mesh_nb[i].append(i) # 填补自己
if len(mesh_nb[i]) < 3: # 缺三个邻接面 是孤立面
mesh_nb[i].append(i) # 也填补自己
mesh_nb = np.array(mesh_nb, dtype=np.int64) # 转为np
# 网格面的法向量
face_normals = np.cross(vs[faces[:, 1]] - vs[faces[:, 0]],
vs[faces[:, 2]] - vs[faces[:, 1]])
face_areas = np.sqrt((face_normals ** 2).sum(axis=1)) # 面的面积
face_error = np.where(face_areas == 0) # 面积为0的索引
face_areas_b = face_areas.copy()
face_areas_b[face_error] = 1
face_normals /= face_areas_b[:, np.newaxis]
face_areas *= 0.5
# 网格面 六个二面角
face_dangle = mesh_nb.copy().astype(np.float64)
nb_dangle = mesh_nb.copy().astype(np.float64)
for a in range(len(mesh_nb)): # 遍历每一个face
normal_a = face_normals[a] # 当前面法向量
for b in range(len(mesh_nb[a])): # 遍历所有邻居
normal_b = face_normals[mesh_nb[a][b]] # 邻居面法向量
tmp = np.sum(normal_a * normal_b).clip(-1, 1) # 避免异常值
face_dangle[a][b] = np.arccos(tmp)
nb_dangle[a][0] = np.arccos(
np.sum((face_normals[mesh_nb[a][0]] * face_normals[mesh_nb[a][1]])).clip(-1, 1))
nb_dangle[a][1] = np.arccos(
np.sum((face_normals[mesh_nb[a][0]] * face_normals[mesh_nb[a][2]])).clip(-1, 1))
nb_dangle[a][2] = np.arccos(
np.sum((face_normals[mesh_nb[a][1]] * face_normals[mesh_nb[a][2]])).clip(-1, 1))
dihedral_angle = np.concatenate([face_dangle, nb_dangle], axis=1)
# xyz
xyz_min = np.min(vs[:, 0:3], axis=0)
xyz_max = np.max(vs[:, 0:3], axis=0)
xyz_move = xyz_min + (xyz_max - xyz_min) / 2
vs[:, 0:3] = vs[:, 0:3] - xyz_move
# scale
scale = np.max(vs[:, 0:3])
vs[:, 0:3] = vs[:, 0:3] / scale
# 面中心坐标
xyz = []
for i in range(3):
xyz.append(vs[faces[:, i]])
xyz = np.array(xyz) # 转为np
mean_xyz = xyz.sum(axis=0) / 3
# 需要存储的信息
mesh.vs = vs
mesh.faces = faces
mesh.xyz = mean_xyz.swapaxes(0, 1)
mesh.mesh_nb = mesh_nb
mesh.dihedral_angle = dihedral_angle
meta = {'mesh': mesh, 'label': label}
with open(cache, 'wb') as f:
pickle.dump(meta, f)
meta['face_features'] = meta['mesh'].dihedral_angle
return meta
2.2 DataLoader
- 自定义了DataLoader,加入了输入特征个数、分类个数和torch.device(‘cuda:0’)
- 使用torch.utils.data.DataLoader记得
import torch.utils.data可显示代码参数 collate_fn有改进空间,如果多个三角网格面的个数不一致,可以用0填补以组成一个batch(对齐)- yield可以看作是return,详情参考3:python中yield的用法详解——最简单,最清晰的解释
class DataLoader:
def __init__(self, phase='train'):
self.dataset = Shrec11(phase=phase)
self.input_n = self.dataset.input_n
self.class_n = self.dataset.class_n
self.device = torch.device('cuda:0') # torch.device('cpu')
self.dataloader = torch.utils.data.DataLoader(
self.dataset,
batch_size=16,
shuffle=True,
num_workers=0,
collate_fn=collate_fn)
def __len__(self):
return len(self.dataset)
def __iter__(self):
for _, data_i in enumerate(self.dataloader):
yield data_i
def collate_fn(batch):
mesh = [d['mesh'] for d in batch]
label = [d['label'] for d in batch]
feature = [d['face_features'] for d in batch]
meta = dict()
meta['mesh'] = mesh
meta['label'] = np.array(label)
meta['face_features'] = np.array(feature)
return meta
三、一个简单的网格分类实验
分类网络:主要由多个线性层组成
使用Adam优化器,交叉熵作为损失函数
3.1 分类结果
| 方法 | 分类准确率 |
|---|---|
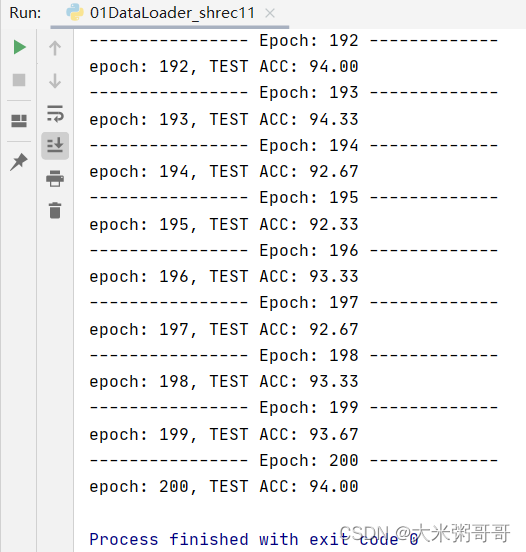
| 本文 | 94 (1 run best) |
| MeshCNN-论文 | 91 (3 run avg) |
| MeshCNN-复现 | 93 (1 run best) |
| MeshCNN-MeshNet++论文复现结果 | 93.4 |
挺有意思一件事,随便写的一个网络就媲美MeshCNN
原因分析:
- 部分代码参考MeshCNN,站在了其肩膀上
感谢MeshCNN的开源 - 特征工程做的比较好,或者说这个特征比较适合在这个数据集上进行分类
- 用了最新的激活函数
GELU(),不得不说深度学习发展是真快
3.2 全部代码
import os
import torch
import torch.utils.data
import numpy as np
import pickle
import torch.nn as nn
import torch.nn.functional as F
class Mesh:
def __init__(self):
pass
class Shrec11:
def __init__(self, phase='train'):
self.root = './datasets/shrec_10/'
self.dir = os.path.join(self.root)
self.classes, self.class_to_idx = self.find_classes(self.dir) # 获取分类
self.paths = self.make_dataset_by_class(self.dir, self.class_to_idx, phase) # 每个网格的路径
self.cache_dir = './results/cache'
if not os.path.exists(self.cache_dir):
os.makedirs(self.cache_dir)
self.size = len(self.paths)
# 输入维度 以及分割数量
self.input_n = 6
self.class_n = len(self.classes)
def __getitem__(self, index):
path = self.paths[index][0] # 路径
label = self.paths[index][1] # 类别 标签
# cache文件
filename, _ = os.path.splitext(path)
prefix = os.path.basename(filename)
cache = os.path.join(self.cache_dir, prefix + '.pkl')
if os.path.exists(cache): # 存在cache文件则直接读取
with open(cache, 'rb') as f:
meta = pickle.load(f)
else: # 不存在则读取obj文件,生成所需信息
mesh = Mesh()
f = open(path)
vs, faces = [], []
for line in f:
line = line.strip()
splitted_line = line.split()
if not splitted_line:
continue
elif splitted_line[0] == 'v':
vs.append([float(v) for v in splitted_line[1:4]])
elif splitted_line[0] == 'f':
face_vertex_ids = [int(c.split('/')[0]) for c in splitted_line[1:]]
assert len(face_vertex_ids) == 3
face_vertex_ids = [(ind - 1) if (ind >= 0) else (len(vs) + ind)
for ind in face_vertex_ids]
faces.append(face_vertex_ids)
f.close()
vs = np.asarray(vs)
faces = np.asarray(faces, dtype=int)
# 网格面的邻接矩阵
mesh_nb = [[] for _ in faces] # 初始化
edge_faces = dict() # 存储 (v,v):[f1,f2] 每条边所在面的序号
for face_id, face in enumerate(faces): # 遍历每一个face
edge_num = len(face) # 边的数量
for i in range(edge_num): # 遍历face中的每一个顶点 构造边
edge = (face[i], face[(i + 1) % edge_num]) # 构造边 (顶点序号,顶点序号)
edge = tuple(sorted(list(edge))) # 固定边的表示
if edge not in edge_faces: # 如果不存在这个key
edge_faces[edge] = [] # 相应key 新建空list
edge_faces[edge].append(face_id) # 存入此边对应的面的序号
for edge, face in edge_faces.items(): # 根据(v,v):[f1,f2] 即可知 f1 f2相邻
if len(face) == 2: # 一条边 对应两个face
mesh_nb[face[1]].append(face[0]) # 在对应face 中添加相邻face序号
mesh_nb[face[0]].append(face[1]) # 在对应face 中添加相邻face序号
for i in range(len(mesh_nb)):
if len(mesh_nb[i]) < 3: # 缺一个邻接面?
mesh_nb[i].append(i) # 填补自己
if len(mesh_nb[i]) < 3: # 缺两个邻接面?
mesh_nb[i].append(i) # 填补自己
if len(mesh_nb[i]) < 3: # 缺三个邻接面 是孤立面
mesh_nb[i].append(i) # 也填补自己
mesh_nb = np.array(mesh_nb, dtype=np.int64) # 转为np
# 网格面的法向量
face_normals = np.cross(vs[faces[:, 1]] - vs[faces[:, 0]],
vs[faces[:, 2]] - vs[faces[:, 1]])
face_areas = np.sqrt((face_normals ** 2).sum(axis=1)) # 面的面积
face_error = np.where(face_areas == 0) # 面积为0的索引
face_areas_b = face_areas.copy()
face_areas_b[face_error] = 1
face_normals /= face_areas_b[:, np.newaxis]
face_areas *= 0.5
# 网格面 六个二面角
face_dangle = mesh_nb.copy().astype(np.float64)
nb_dangle = mesh_nb.copy().astype(np.float64)
for a in range(len(mesh_nb)): # 遍历每一个face
normal_a = face_normals[a] # 当前面法向量
for b in range(len(mesh_nb[a])): # 遍历所有邻居
normal_b = face_normals[mesh_nb[a][b]] # 邻居面法向量
tmp = np.sum(normal_a * normal_b).clip(-1, 1) # 避免异常值
face_dangle[a][b] = np.arccos(tmp)
nb_dangle[a][0] = np.arccos(
np.sum((face_normals[mesh_nb[a][0]] * face_normals[mesh_nb[a][1]])).clip(-1, 1))
nb_dangle[a][1] = np.arccos(
np.sum((face_normals[mesh_nb[a][0]] * face_normals[mesh_nb[a][2]])).clip(-1, 1))
nb_dangle[a][2] = np.arccos(
np.sum((face_normals[mesh_nb[a][1]] * face_normals[mesh_nb[a][2]])).clip(-1, 1))
dihedral_angle = np.concatenate([face_dangle, nb_dangle], axis=1)
# xyz
xyz_min = np.min(vs[:, 0:3], axis=0)
xyz_max = np.max(vs[:, 0:3], axis=0)
xyz_move = xyz_min + (xyz_max - xyz_min) / 2
vs[:, 0:3] = vs[:, 0:3] - xyz_move
# scale
scale = np.max(vs[:, 0:3])
vs[:, 0:3] = vs[:, 0:3] / scale
# 面中心坐标
xyz = []
for i in range(3):
xyz.append(vs[faces[:, i]])
xyz = np.array(xyz) # 转为np
mean_xyz = xyz.sum(axis=0) / 3
# 需要存储的信息
mesh.vs = vs
mesh.faces = faces
mesh.xyz = mean_xyz.swapaxes(0, 1)
mesh.mesh_nb = mesh_nb
mesh.dihedral_angle = dihedral_angle
meta = {'mesh': mesh, 'label': label}
with open(cache, 'wb') as f:
pickle.dump(meta, f)
meta['face_features'] = meta['mesh'].dihedral_angle
return meta
def __len__(self):
return self.size
@staticmethod
def find_classes(dirs):
classes = [d for d in os.listdir(dirs) if os.path.isdir(os.path.join(dirs, d))]
classes.sort()
class_to_idx = {classes[i]: i for i in range(len(classes))}
return classes, class_to_idx
@staticmethod
def make_dataset_by_class(dirs, class_to_idx, phase):
meshes = []
dirs = os.path.expanduser(dirs)
for target in sorted(os.listdir(dirs)):
d = os.path.join(dirs, target)
if not os.path.isdir(d):
continue
for root, _, all_files in sorted(os.walk(d)):
for file_name in sorted(all_files):
if root.count(phase) == 1:
path = os.path.join(root, file_name)
item = (path, class_to_idx[target])
meshes.append(item)
return meshes
class DataLoader:
def __init__(self, phase='train'):
self.dataset = Shrec11(phase=phase)
self.input_n = self.dataset.input_n
self.class_n = self.dataset.class_n
self.device = torch.device('cuda:0') # torch.device('cpu')
self.dataloader = torch.utils.data.DataLoader(
self.dataset,
batch_size=16,
shuffle=True,
num_workers=0,
collate_fn=collate_fn)
def __len__(self):
return len(self.dataset)
def __iter__(self):
for _, data_i in enumerate(self.dataloader):
yield data_i
def collate_fn(batch):
mesh = [d['mesh'] for d in batch]
label = [d['label'] for d in batch]
feature = [d['face_features'] for d in batch]
meta = dict()
meta['mesh'] = mesh
meta['label'] = np.array(label)
meta['face_features'] = np.array(feature)
return meta
class Net(nn.Module):
def __init__(self, dim_in=6, class_n=30):
super(Net, self).__init__()
self.linear1 = nn.Conv1d(dim_in, 128, 1, bias=False)
self.bn1 = nn.BatchNorm1d(128)
self.linear2 = nn.Conv1d(128, 128, 1, bias=False)
self.bn2 = nn.BatchNorm1d(128)
self.linear3 = nn.Conv1d(128, 128, 1, bias=False)
self.bn3 = nn.BatchNorm1d(128)
self.gp = nn.AdaptiveAvgPool1d(1)
self.linear4 = nn.Linear(128, 128)
self.bn4 = nn.BatchNorm1d(128)
self.linear5 = nn.Linear(128, class_n)
self.act = nn.GELU() # 激活函数
def forward(self, x):
x = x.permute(0, 2, 1).contiguous()
x = self.act(self.bn1(self.linear1(x)))
x = self.act(self.bn2(self.linear2(x)))
x = self.act(self.bn3(self.linear3(x)))
x = self.gp(x) # 平均池化
x = x.squeeze(-1)
x = self.act(self.bn4(self.linear4(x)))
x = self.linear5(x)
return x
if __name__ == '__main__':
# 输入
data_train = DataLoader(phase='train') # 训练集
data_test = DataLoader(phase='test') # 测试集
dataset_size = len(data_train) # 数据长度
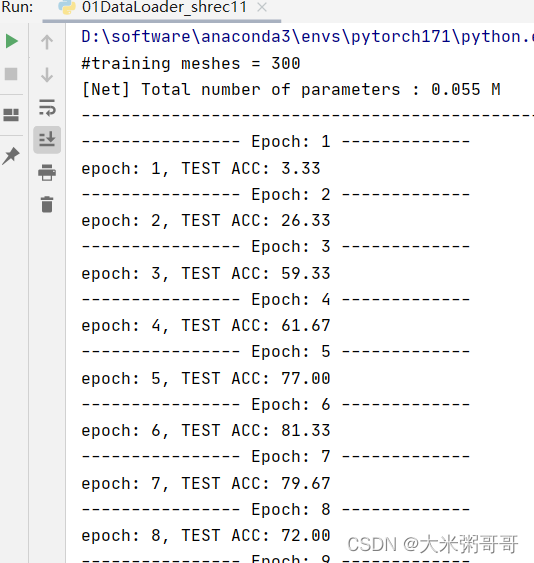
print('#training meshes = %d' % dataset_size) # 输出模型个数
# 网络
net = Net(data_train.input_n, data_train.class_n) # 创建网络 以及 优化器
optimizer = torch.optim.Adam(net.parameters(), lr=0.001, betas=(0.9, 0.999))
net = net.cuda(0)
loss_fun = torch.nn.CrossEntropyLoss(ignore_index=-1)
num_params = 0
for param in net.parameters():
num_params += param.numel()
print('[Net] Total number of parameters : %.3f M' % (num_params / 1e6))
print('-----------------------------------------------')
# 迭代训练
for epoch in range(1, 201):
print('---------------- Epoch: %d -------------' % epoch)
for i, data in enumerate(data_train):
# 前向传播
net.train(True) # 训练模式
optimizer.zero_grad() # 梯度清零
face_features = torch.from_numpy(data['face_features']).float()
face_features = face_features.to(data_train.device).requires_grad_(True)
labels = torch.from_numpy(data['label']).long().to(data_train.device)
out = net(face_features) # 输入到网络
# 反向传播
loss = loss_fun(out, labels)
loss.backward()
optimizer.step() # 参数更新
# 测试
net.eval()
acc = 0
for i, data in enumerate(data_test):
with torch.no_grad():
# 前向传播
face_features = torch.from_numpy(data['face_features']).float()
face_features = face_features.to(data_test.device).requires_grad_(False)
labels = torch.from_numpy(data['label']).long().to(data_test.device)
out = net(face_features)
# 计算准确率
pred_class = out.data.max(1)[1]
correct = pred_class.eq(labels).sum().float()
acc += correct
acc = acc / len(data_test)
print('epoch: %d, TEST ACC: %0.2f' % (epoch, acc * 100))
















 189
189











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











