







单车模型建模
车辆横向运动的运动学建模
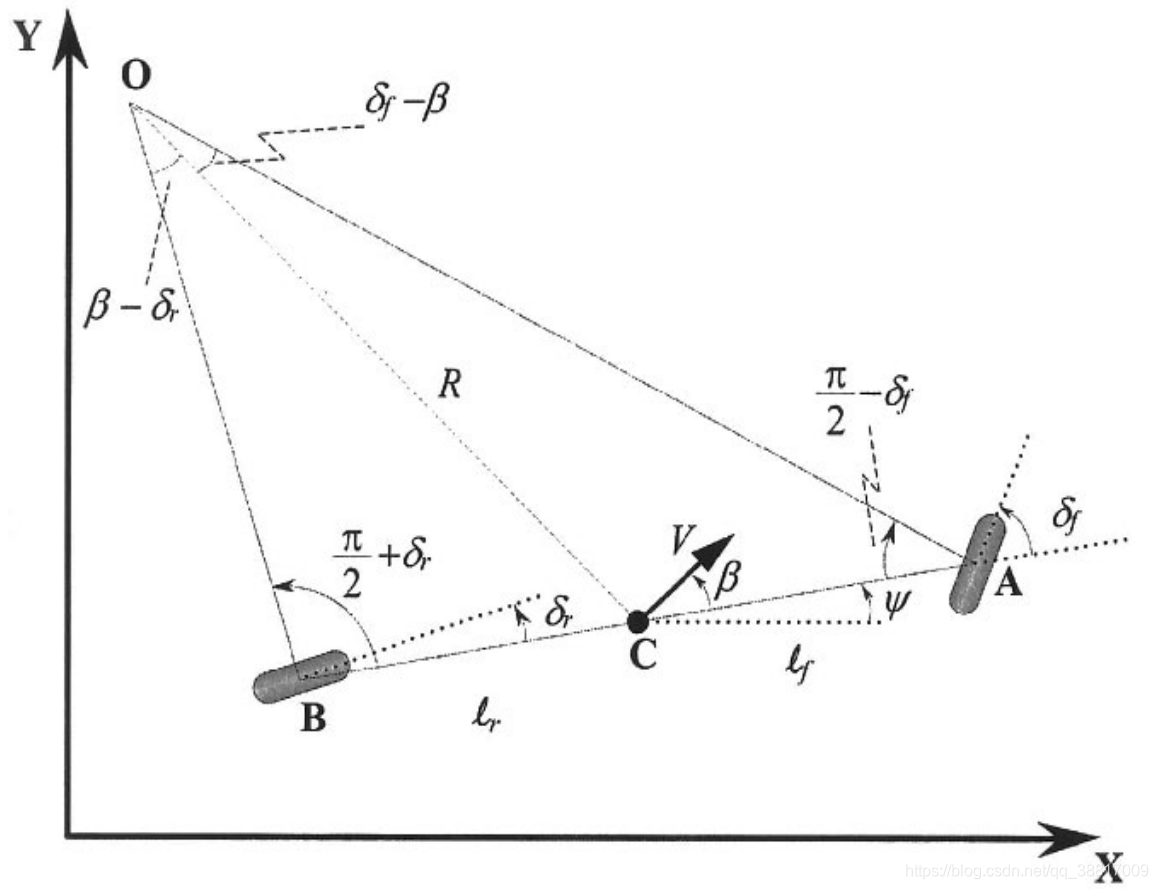
其中X, Y表示车辆的位置,
ψ
\psi
ψ表示车辆当前的heading 角,
β
\beta
β表示车辆的滑移角,V表示当前的速度,
δ
f
,
δ
r
\delta_f, \delta_r
δf,δr分别表示前轮和后轮的转向角度,为了简化模型,
β
\beta
β,
δ
r
\delta_r
δr一般当作0来处理,事实证明当汽车行驶速度比较小的时候,这个假设是合理的.
车辆的航向角 γ = ψ + β \gamma = \psi + \beta γ=ψ+β
对三角形OCA利用正弦定理可得:
s
i
n
(
δ
f
−
β
)
l
f
=
s
i
n
(
π
2
−
δ
f
)
R
\frac{sin(\delta_f-\beta)}{l_f} = \frac {sin({\frac{\pi}{2}-\delta_f)}}{R}
lfsin(δf−β)=Rsin(2π−δf)
对三角形OCB利用正弦定理可得:
s
i
n
(
β
−
δ
r
)
l
r
=
s
i
n
(
π
2
+
δ
r
)
R
\frac{sin(\beta-\delta_r)}{l_r} = \frac{sin(\frac{\pi}{2}+\delta_r)}{R}
lrsin(β−δr)=Rsin(2π+δr)
由上式展开可得:
s
i
n
(
δ
f
)
c
o
s
(
β
)
−
s
i
n
(
β
)
c
o
s
(
δ
f
)
l
f
=
c
o
s
(
δ
f
)
R
\frac{sin(\delta_f)cos(\beta)-sin(\beta)cos(\delta_f)}{l_f}=\frac{cos(\delta_f)}{R}
lfsin(δf)cos(β)−sin(β)cos(δf)=Rcos(δf)
s
i
n
(
β
)
c
o
s
(
δ
r
)
−
c
o
s
(
β
)
s
i
n
(
δ
r
)
l
r
=
−
c
o
s
(
δ
r
)
R
\frac{sin(\beta)cos(\delta_r)-cos(\beta)sin(\delta_r)}{l_r}=-\frac{cos(\delta_r)}{R}
lrsin(β)cos(δr)−cos(β)sin(δr)=−Rcos(δr)
将两式整理可得:
(
t
a
n
(
δ
f
)
−
t
a
n
(
δ
r
)
)
c
o
s
(
β
)
=
l
f
+
l
r
R
(tan(\delta_f)-tan(\delta_r))cos(\beta)=\frac{l_f+l_r}{R}
(tan(δf)−tan(δr))cos(β)=Rlf+lr
β
=
t
a
n
−
1
(
l
f
t
a
n
δ
r
+
l
r
t
a
n
δ
f
l
f
+
l
r
)
\beta = tan^{-1}(\frac{{l_f}tan\delta_r+l_r{tan\delta_f}}{l_f+l_r})
β=tan−1(lf+lrlftanδr+lrtanδf)
因为车辆速度比较慢,所以转向半径变化比较慢,所以车辆方向变化率等于车辆的角速度,即
ψ
ˊ
=
V
R
\acute{\psi}=\frac{V}{R}
ψˊ=RV
ψ
ˊ
=
V
c
o
s
(
β
)
(
t
a
n
(
δ
f
)
−
t
a
n
(
δ
r
)
)
l
f
+
l
r
\acute{\psi}=\frac{Vcos(\beta)(tan(\delta_f)-tan(\delta_r))}{l_f+l_r}
ψˊ=lf+lrVcos(β)(tan(δf)−tan(δr))
在X和Y方向的的方程分别为:
X
ˊ
=
V
c
o
s
(
ψ
+
β
)
\acute{X}=Vcos(\psi+\beta)
Xˊ=Vcos(ψ+β)
Y
ˊ
=
V
s
i
n
(
ψ
+
β
)
\acute{Y}=Vsin(\psi+\beta)
Yˊ=Vsin(ψ+β)
在这个模型里面有三个输入:
δ
f
,
δ
r
,
V
\delta_f,\delta_r,V
δf,δr,V.速度V是一个外部变量,可以从纵向模型中得到,滑移角
β
\beta
β可以由前面的式子求得
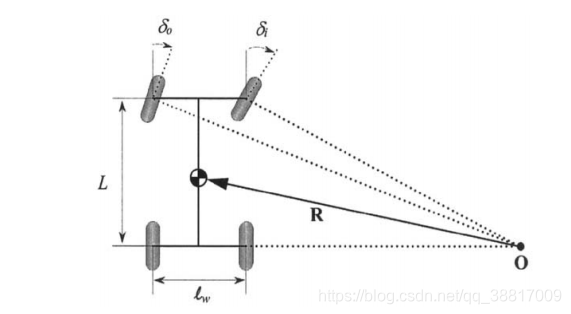
阿克曼转向几何
令
L
=
l
f
+
l
r
L=l_f+l_r
L=lf+lr,由上面的式子简化可得:
ψ
ˊ
V
=
1
R
=
δ
L
\frac{\acute{\psi}}{V}=\frac{1}{R}=\frac{\delta}{L}
Vψˊ=R1=Lδ,第一步是由角速度乘以半径得到速度算得,第二步是简化上面的式子得到,由于L与R相差横多,所以
δ
\delta
δ比较小,此时有
t
a
n
(
δ
)
=
δ
tan(\delta)=\delta
tan(δ)=δ,最后推得
δ
=
L
R
\delta=\frac{L}{R}
δ=RL
由于内轮和外轮是不同的,所以得到下式:
δ
o
=
L
R
−
l
w
2
\delta_o=\frac{L}{R-\frac{l_w}{2}}
δo=R−2lwL
δ
i
=
L
R
−
l
w
2
\delta_i=\frac{L}{R-\frac{l_w}{2}}
δi=R−2lwL
δ
=
δ
o
+
δ
i
2
=
L
R
\delta=\frac{\delta_o+\delta_i}{2}=\frac{L}{R}
δ=2δo+δi=RL
最后推得:
δ
i
−
δ
o
=
L
∗
l
w
R
2
=
δ
2
∗
l
w
L
\delta_i-\delta_o=\frac{L*l_w}{R^2}=\frac{{\delta^2}*l_w}{L}
δi−δo=R2L∗lw=Lδ2∗lw














 296
296











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









