







概述:本文主要学习车辆横向控制的相关理论知识——横向运动学模型。
文章目录
前言
本文将深入研究自动驾驶车辆在横向上的运动控制相关理论知识。

横向运动控制主要控制车辆沿着期望的轨迹行驶,保证路线满足的车辆的动力学特性等等。
一、车辆横向运动学模型(Lateral Vehicle Dynamics)
要想控制车辆的运动,首先要对车辆的运动建立一个数据化的模型,车辆的数学模型越准确,对车辆的描述也就越准确,对车辆追踪轨迹的控制效果就会更好。
建立的模型除了真实的反应车辆特性以外,也应该简单易用。所以,我们的运动学模型(Kinematic Model)就是从几何的角度去研究物体的规律,包括物体在空间上的位置、速度随时间产生的变化。
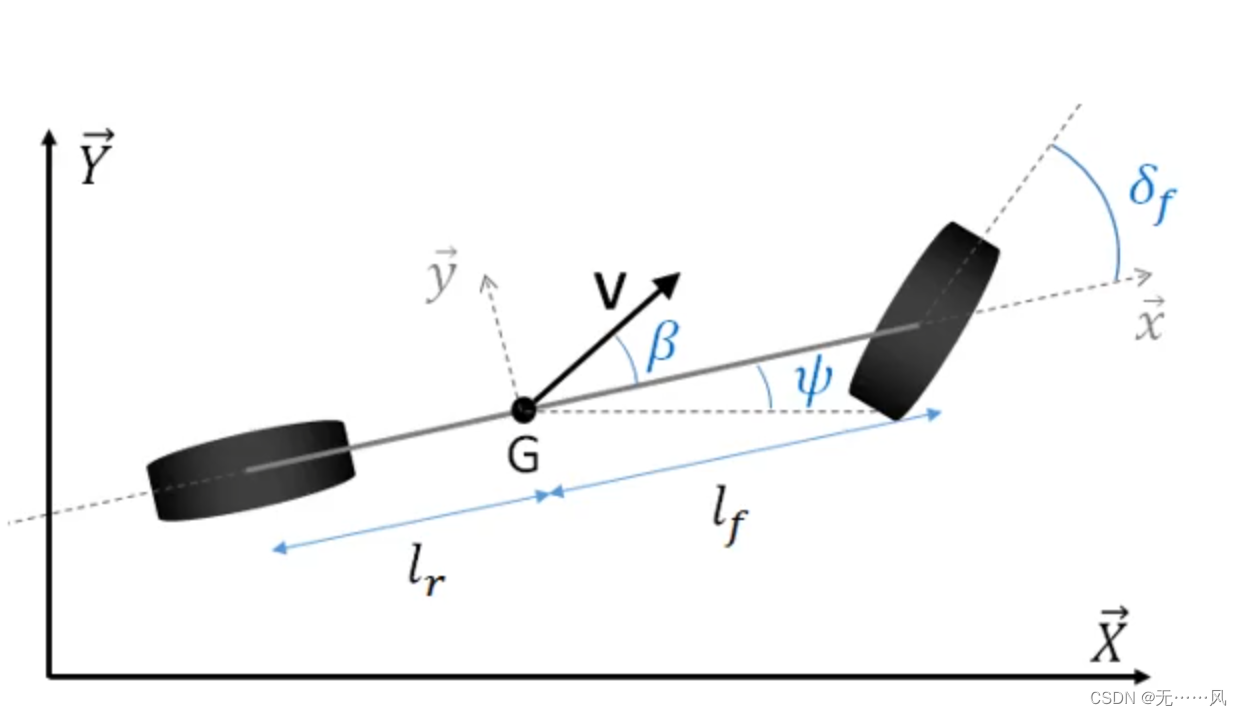
自行车模型(Bicycle Model)就是我们常见的车辆运动学模型,这个模型很简单却能够准确的描述车辆运动关系之间的约束。如图所示。
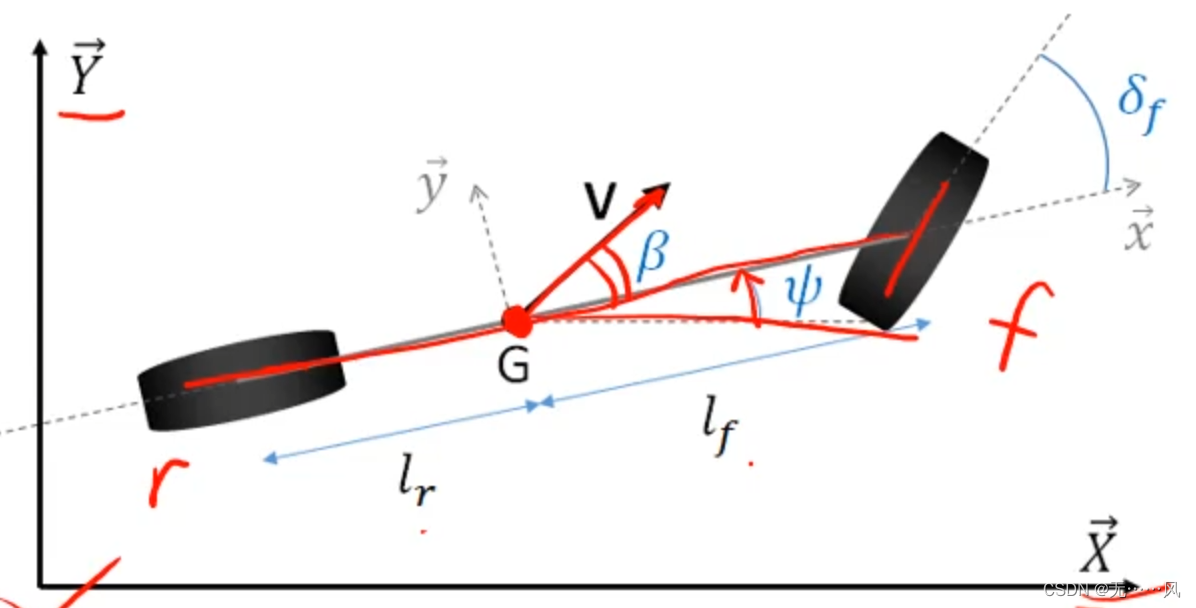
这个模型是在惯性坐标系下所描述的,
上图解析:
- F、R:车轮代表前轮(右边)和后轮(左边)
- ψ:偏航角(横摆角(yaw)),车辆的纵轴和X轴的夹角,用弧度来描述, 逆时针方向为正
- G:车辆的质心,其速度为V。
- β:质心侧偏角,车辆质心速度和车辆纵轴之间的夹角。
- Lf、Lr:质心距离车辆前轴、后轴的距离。
建模假设:
- 假设车辆平面运动,即车辆在Z轴上的运动被忽略,我们在一个二维的X、Y平面上来描述车辆。我们就可以用x,y,ψ来描述车辆的运动。
- 假设我们左右两个前轮的转向角是近似相等的,也就是说两侧轮胎的转速和转角是一样的。这样,我们就可以把左右两个前轮用一个前轮来代替,后轮同理,这样,我们就可以把车辆的四轮模型简化为两轮的自行车模型。注意:实际上左右两轮的转角、转速是不相同的。
- 忽略了轮胎受到的侧向力(slip angle),即前轮与车辆纵轴的夹角δf,与前轮的速度是方向是一致的,后轮也是一样的。这样我们就忽略了轮胎上的侧偏角,假设在低速时是合理的。因为,在低速时轮胎产生的侧向力是很小的。高速时就不适用了,会在动力学模型中体现。
- 假设车辆的行驶速度变化比较缓慢,这样就忽略了前后轴的载荷转移。
- 假设整车及悬架系统是刚性的,如车轮没有滑移运动,也就是说整车纵轴的方向就是车辆的运动方向。
基于以上的假设,我们就可以对自行车模型进行运动学建模。
注:惯性坐标系是为了简化世界坐标系到惯性坐标系的转化而产生的,引入了惯性坐标系之后,物体坐标系转换到惯性坐标系只需旋转,从惯性坐标系转换到世界坐标系只需平移。
二、车辆横向运动学模型分析
运动学建模的目标就是根据当前已知的状态量和控制量去预测车辆未来的状态量。
-
输入量:输入量也就是控制量,就是作用于我们系统用来调整动态系统特性的量,
对于车辆来说:
(1)就是给车辆一个纵向的速度V(控制车速靠加速踏板给的加速度、制动踏板给的减速度);
(2)横向的转角δ(方向盘输入到转向轮的一个转角)。
如图所示。

-
状态变量:能够完全表征系统运动状态的最小一组变量,也就是完全表征系统行为最小个数的变量,一旦小于该状态变量的个数,就会破坏我们表征的完整性。
(1)车辆的位置(x,y);
(2)速度、速度的变化量(加速度)等;
(3)方向(yaw ψ)、角速度(yaw rate)等。
根据不同的建模需求,我们可以选择不同的状态量。
2.1 自行车模型(Bicycle Model)
确定了系统的控制量和状态变量后,需要寻找他们之间的关系,建立数学表达式,这里我们选择车辆质心作为参考点,建立车辆运动学模型。如图所示。
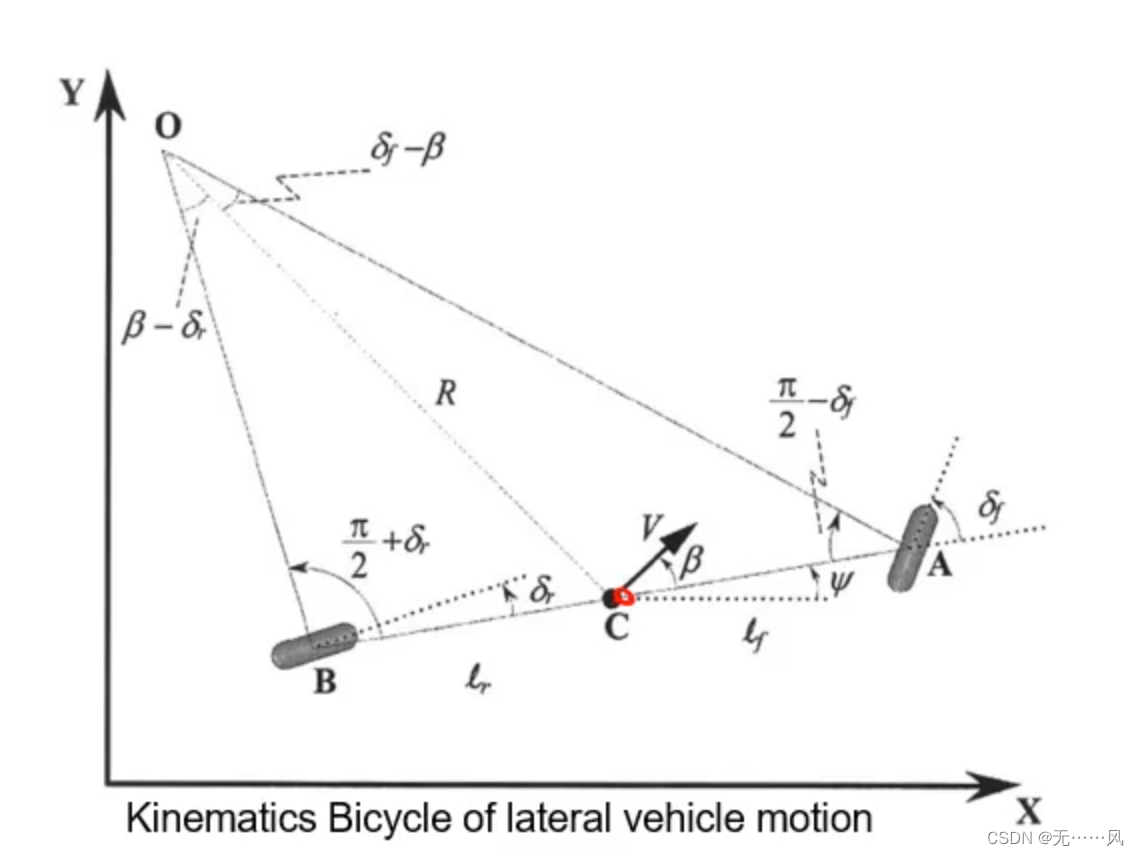
如图我们可以看到,
(1)车辆会围绕O点进行旋转,O其实就是我们的转动中心(前轮重中心的垂线与我们后轮中心的垂线之间的交点);
(2)旋转半径R就是旋转中心O到我们质心的距离;
(3)∠OAC:
(4)∠AOC:
(5)∠CBO:
(6)∠COB:
我们利用三角函数正弦定理对▲OCA和▲OCB进行运算:
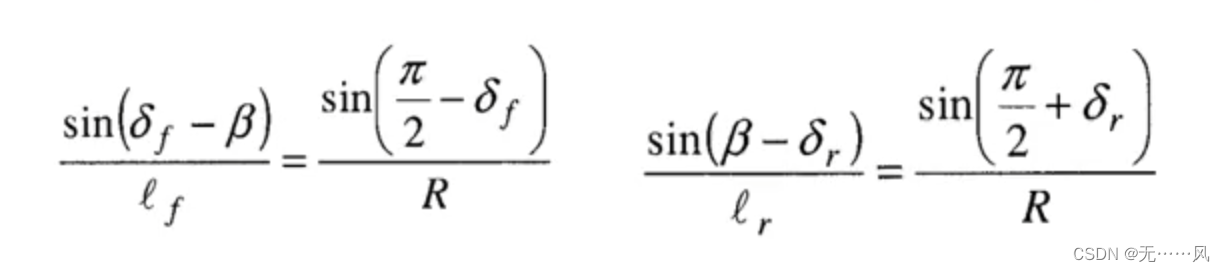
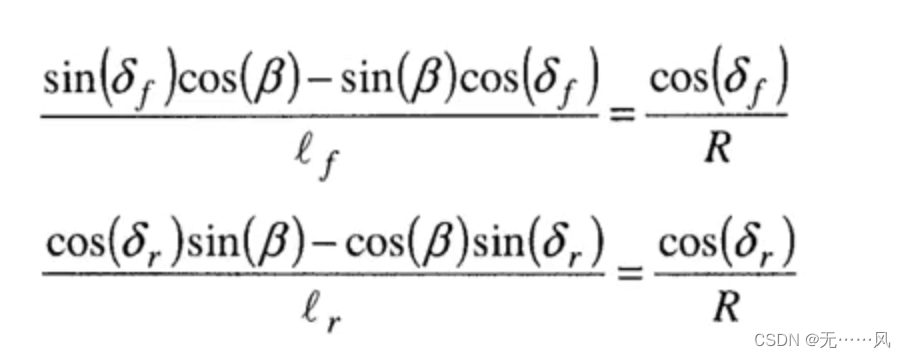
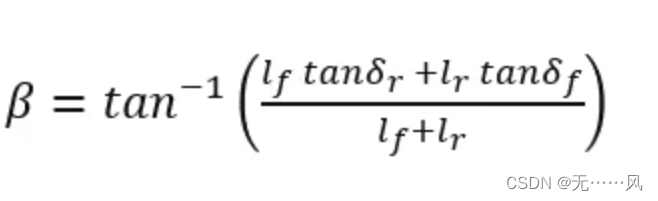
注:可用下述等式推出β。
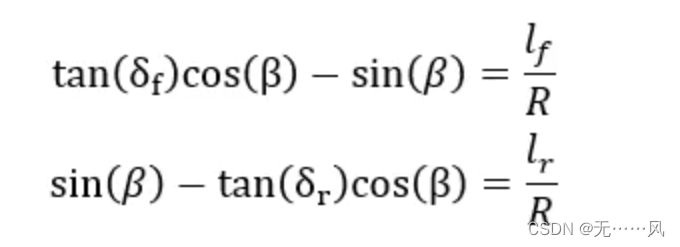
将上图的表达式相加,可得到:
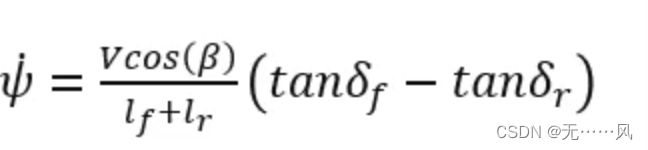
 由于我们车是在低速下行驶,变化比较缓慢,我们可以认为,车辆方向上的变化率等于车的角速度(yaw角),也就是说车辆的角速度在质心上的表现就):
由于我们车是在低速下行驶,变化比较缓慢,我们可以认为,车辆方向上的变化率等于车的角速度(yaw角),也就是说车辆的角速度在质心上的表现就):
结合上述公式可得:
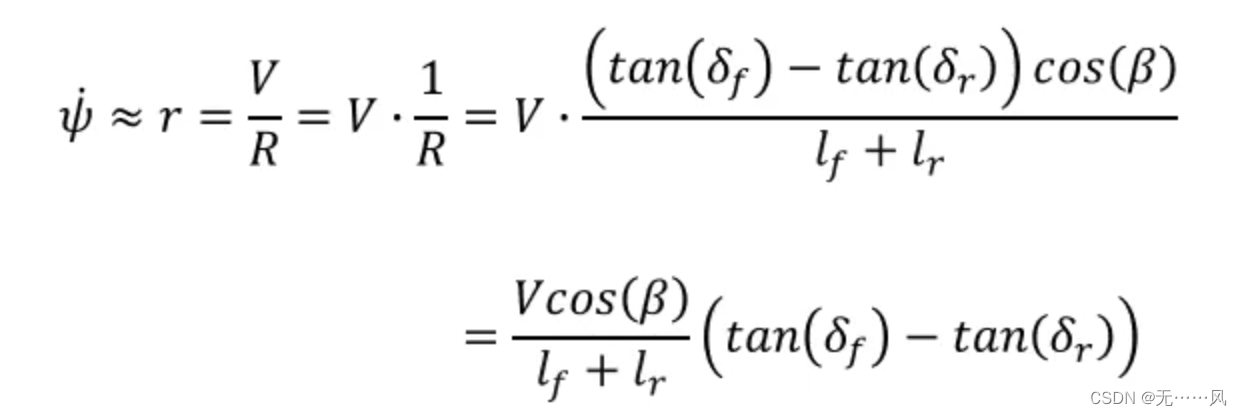
这样我们就建立起,车轮的转角与车的转速之间的关系,即得到了车辆质心为参考点的运动模型:
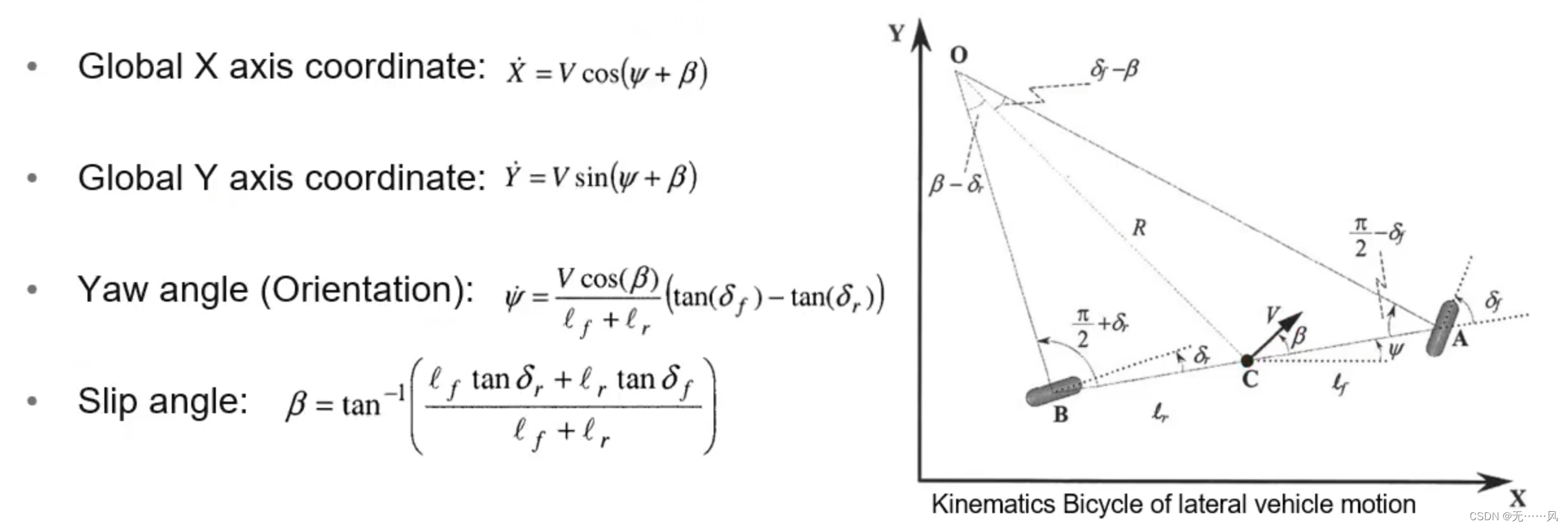
如图,可知,我们确定了系统的控制量和状态变量的数学表达关系:
(1)控制量:δf,δr
(2)状态变量:x,y,ψ,β
-
其中质心的速度在x轴的分量:

-
质心的速度在y轴的分量:

-
横摆角速度(yaw rate):
-
质心侧偏角(通常在低速行驶时,认为这个角非常小)可以由
2.2 阿克曼转向几何模型(Ackerman turning geometry)
它是解决交通用工具转弯的时候,内外转向轮指向圆心不同的一个几何学方法。(前面说到的自行车模型就假设左右轮的旋转角一致,而通常实际情况下,左右轮的旋转角及旋转中心可能不一致。)如图所示。
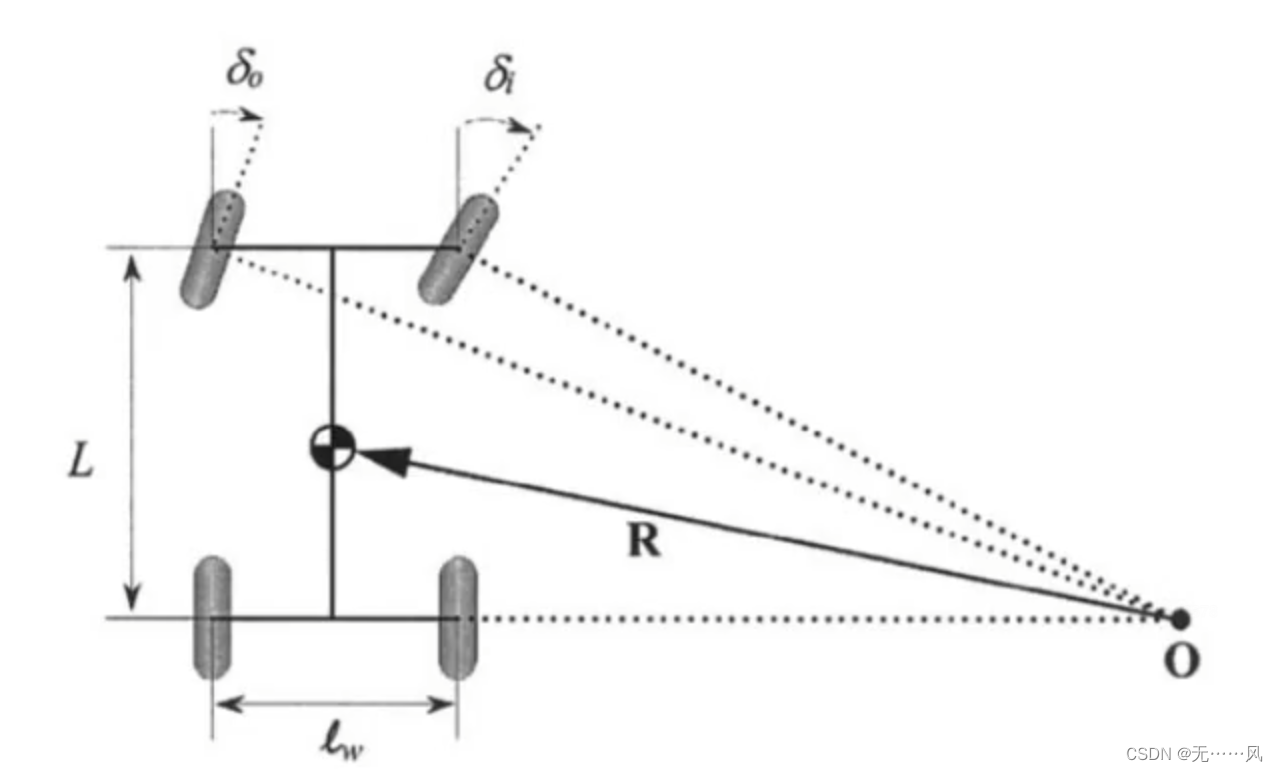
根据阿克曼转向几何设计的车辆沿着弯道转弯的时候,可以利用四连杆的相等曲柄使得内侧轮的转向角比外侧轮的转向角大2-3°,使得四个轮子路径的圆心大致交汇于后轮延长线的顺时转向中心。这样就可以让车辆更顺畅的转弯。
这里我们以上述图片建立模型:
根据我们上面推导的角速度表达式:
(1)
由于我们的tanδf非常小,所以我们可以近似成δf(弧度),后轮的转向角在这个模型我们可以假设为0,同时质心侧偏角非常小,我们可以将cosβ近似成1。
低速情况下,车辆方向的变化率等于车辆的角速度,这样我们可以简化为:

(2)而我们的平均转向角:

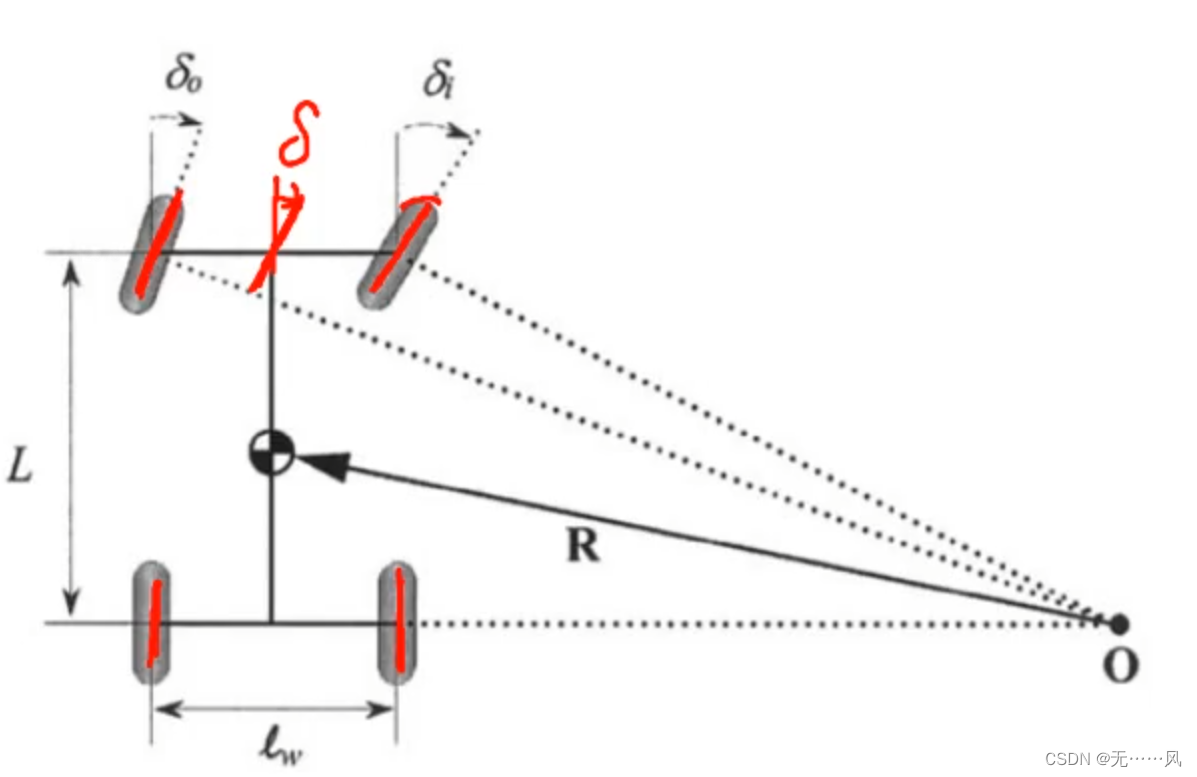
(3)车轮外侧转向角

(4)车轮内侧转向角

由外侧转向角和内侧转向角,我们可以得到差值:

由于车的宽度是远远小于我们的转向半径,结合平均转向角表达式,所以表达式可变为:

由于,lw和L是常数,所以该差值与平均转向角平方成正比,我们可以看出,当转角越大,平均转向角越大,我们内外侧转角的差值就越大。如图所示。
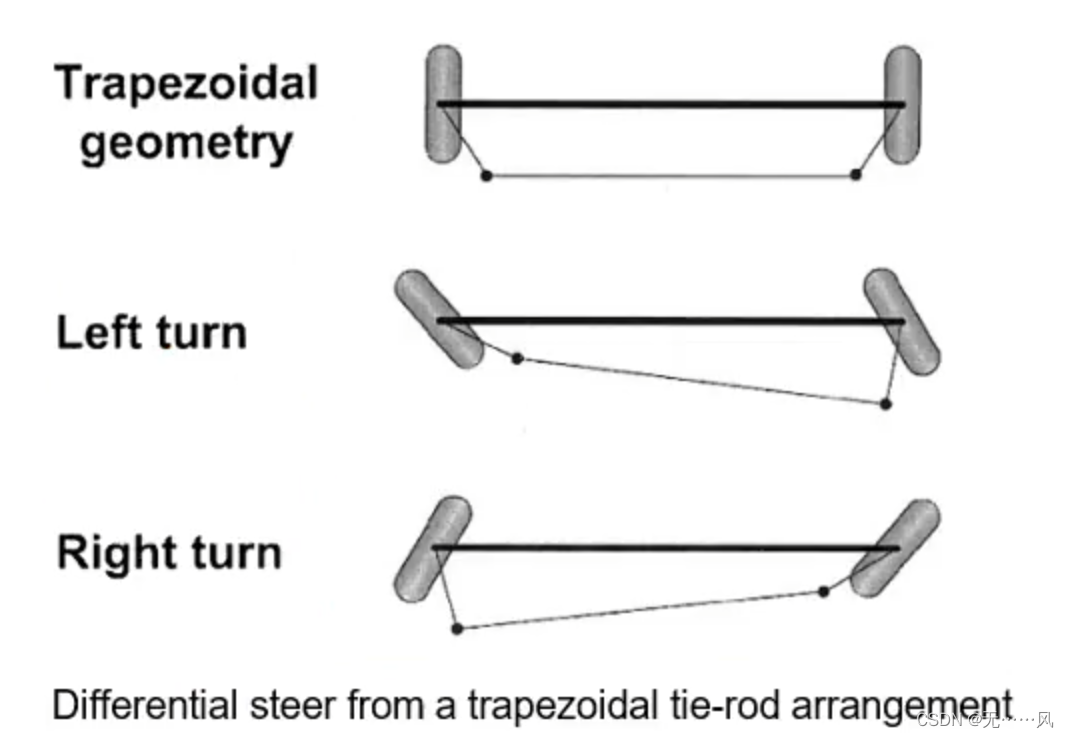
(1)车辆向左转时,左边车轮转向角大。
(2)车辆向右转时,右边车轮转向角大。
三、 模型对比及应用
横向运动学控制模型对比及应用:
- 自行车模型:适合车辆转向角小的情况下,适度转弯;
- 阿克曼模型:适合车辆转向角大的情况下,急转弯。
运动学和动力学模型对比及应用:
- 运动学模型:运动学模型忽略了轮胎力、纵向力、空气阻力的影响,它是动力学模型简化的版本。它虽然降低了模型的准确性,但是使得我们设计、分析控制器、建立模型更加的简化。在大多数场景下(低速、中速),运动学模型可以近似成动力学模型。
- 动力学模型:运动学模型包含了轮胎力、纵向力、空气阻力的影响,降低了模型的准确性。
适用场景:
- 运动学场景:适用于中低速场景如居民区的配送、停车场停车的场景下的控制。
- 动力学场景:适用于低速、高速场景。
总结
本文主要是对于自动驾驶规划控制学习中的横向控制理论知识进行学习,主要介绍了横向运动学控制模型的建立,横向运动学模型中两种模型:自行车模型、阿克曼几何模型以及其模型对比。这篇文章希望可以对想要学习自动驾驶规划控制方向的同学们有一定的帮助。
喜欢的朋友们动动小手点个关注,我会定期分享我的一些知识总结和心得体会,感谢大家!















 549
549











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









