







 本文深入分析Madgwick的论文,探讨使用梯度下降法求解四轴飞行器姿态的四元数更新。通过介绍欧拉角和旋转矢量的概念,详细阐述四元数在坐标转换中的应用。接着,文章详细讲解了基于陀螺仪和加速度计、磁力计数据的滤波融合算法,特别是梯度下降法在四元数融合中的作用,包括误差函数、雅各比矩阵和梯度计算。此外,还讨论了参数γt的选择和陀螺仪漂移补偿策略,以实现更准确的姿态解算。
本文深入分析Madgwick的论文,探讨使用梯度下降法求解四轴飞行器姿态的四元数更新。通过介绍欧拉角和旋转矢量的概念,详细阐述四元数在坐标转换中的应用。接着,文章详细讲解了基于陀螺仪和加速度计、磁力计数据的滤波融合算法,特别是梯度下降法在四元数融合中的作用,包括误差函数、雅各比矩阵和梯度计算。此外,还讨论了参数γt的选择和陀螺仪漂移补偿策略,以实现更准确的姿态解算。
九轴MARG传感器梯度下降法
介绍
本文主要是对Madgwick在2010年发表的文章《An efficient orientation filter for inertial and inertial/magnetic sensor arrays》进行分析,讨论Madgwick所提出的梯度下降法在四轴姿态求解四元数更新中的实用性。
四元数求解姿态角
在空间中,一个刚体由一个位置到另一个位置的表现形式常用的有两种。
一种是欧拉角,将刚体分别绕负Z轴旋转航向角φ角,再绕正X轴旋转滚转角θ角,最后绕正Y轴旋转俯仰角γ角,可以与目的地位置的刚体重合。
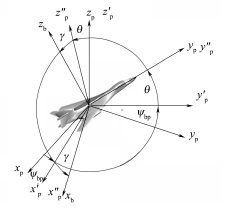

另一种是旋转矢量表示法,在空间中可以找到一根轴r,沿着这根轴,刚体锥面旋转θ角,与目的地位置的刚体重合。

设想一下,刚体在整个过程中不动,动的是刚体所在的坐标系,即在刚体所在的坐标系中,刚体是保持静止的,刚体所在坐标系相对于惯性系有运动,因此在惯性系中看来,刚体的坐标也发生了变化。对应于四轴飞行器,其所在坐标系被称为机体坐标系
b系(之后简称b系),而惯性系被称为游移方位坐标系p系(之后简称p系,若为指北方位,则p系与导航坐标系重合,若为游移方位,则与导航系有个游移角偏差),飞行器姿态的变化可以看作是b系相对于p系的运动。
与刚体运动表现形式相同,坐标系的运动也一样,初始时,b系与p系保持一致,即四轴在b系与p系的坐标是相同的,用欧拉角来说就是航向角、滚转角和俯仰角均为0,用旋转矢量来说是旋转轴可任取,旋转角度为0。
一切在四轴动起来之后发生变化。
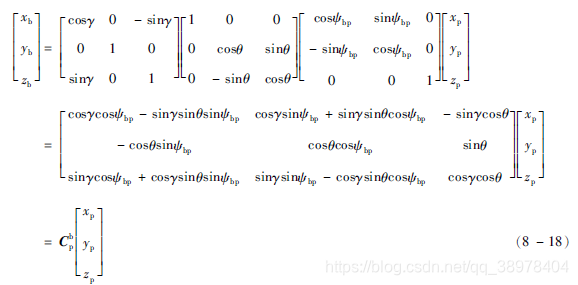
欧拉角在坐标变化中演变成了旋转矩阵。
旋转矢量用四元数来进行数学表达,可在图中找到旋转轴与旋转角度的对应关系。
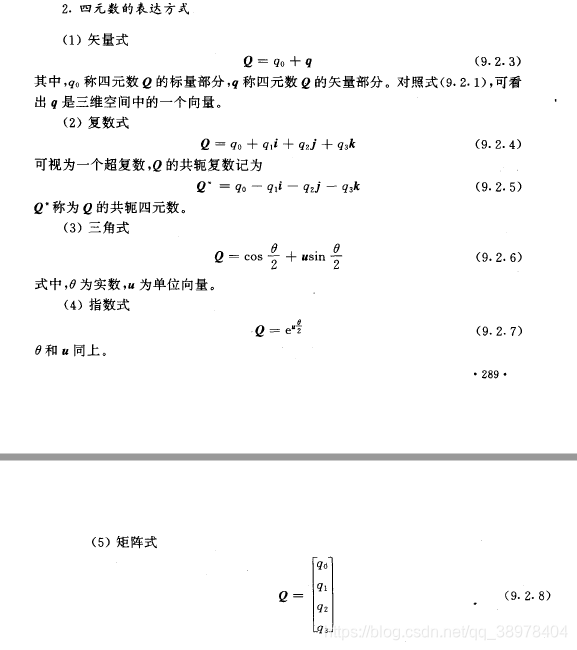
在进行下一步的计算前需要对四元数的运算有所了解。
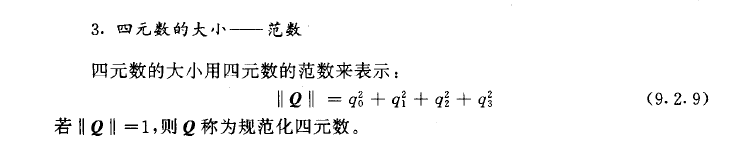
范数:
乘法(不可逆):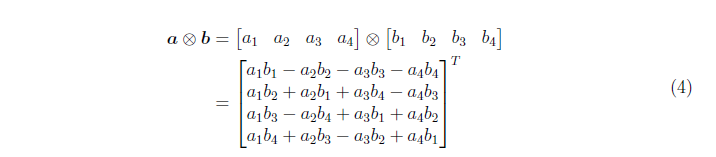
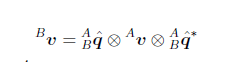
在下面的图中,Bv是描述在B系中的向量v,Av是描述在A系中的向量v, ABq是指描述B系相对于A系运动的四元数,Av左乘四元数q右乘q的共轭即将向量v所在的坐标系由A系转到了B系,四元数在这里的作用相当于矩阵R,如下图,矩阵R是经过推导所得,具体过程可参考秦永元06版《惯性导航》。

上述矩阵R就是我们前面所得到的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1939
1939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









