







本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶技术概览》书籍的笔记。
1.自动驾驶汽车整体架构
1.1 概述
- 汽车自动驾驶技术,依靠计算机与人工智能技术在没有人为操纵情况下,完成完整、安全、有效的驾驶的一项前沿科技;
- 自动驾驶系统是一个复杂的系统;在无人车实际使用中,需要无人驾驶系统完成感知、决策、控制3大任务,即:环境感知系统、定位导航系统、路径规划系统;
- 感知系统: 依赖来自传感器的大量数据,进而实现对车辆运动、环境,及驾驶员状态行为的感知与监测;自动驾驶感知系统用到各种传感器,包括:摄像头、毫米波雷达、激光雷达、超声波雷达、红外夜视,用于定位和导航的GNSS(全球导航卫星系统)和IMU(惯性测量单元);
- 决策系统: 第一步,认知理解,根据感知系统收集的信息,对车辆自身进行精确定位和对车辆周围环境进行准确理解;第二步,决策规划,对接下来可能发生情况的准确预测,对下一步行动的准确判断和规划,并选择合理的路径达到目标;
- 控制系统: 负责将决策和规划落实为切实的行为;
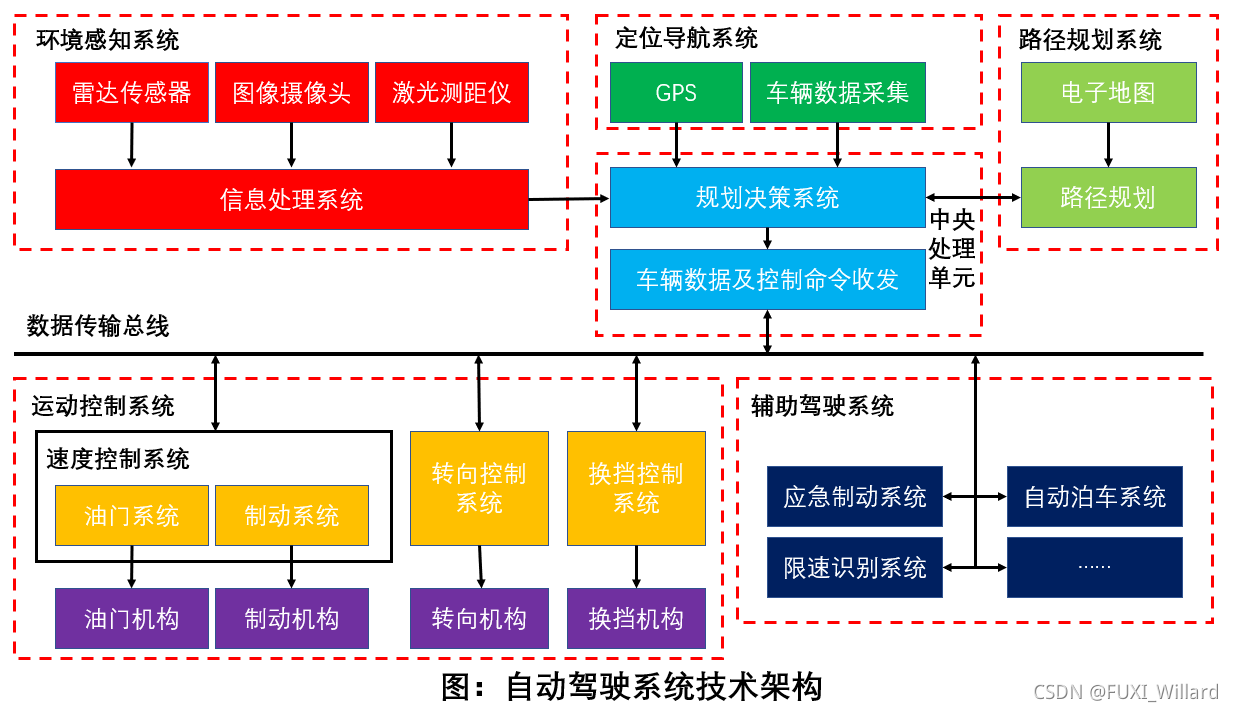
1.2 自动驾驶系统技术架构


















 4468
4468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











