







接上一节的内容,本节笔记记录的问题:
1、为什么需要设计环路补偿?
2、3种补偿拓扑电路、零极点计算、电路参数确定。
-
为什么要设计环路补偿
当电源的输入输出等基本参数确定下来,如果需要调整电源的动态性能,那么调节环路补偿时最为简单的。电源在工作中可能遇到不同的输入和负载的变化,我们需要关心的是,无论负载和输入如何变化,电源都不会出现不稳定的情况。从直流到高频段,电源所表现出来的增益和相位有所不同,而在某些频率段,电源输出可能不在稳定。由第一节的闭环系统框图可知:
一个闭环系统需要稳定,需要满足分母不能为0,因为分母为0就代表这个系统增益无穷大,现实中不存在这种情况。那什么情况下分母为0呢?即幅值为1,且相位为-180。在系统设计时,设计人员要尽可能避免出现这种情况,并且设计指标尽量远离这两个指标,这也就时为什么我们要强调预留一定的增益裕量和相位裕度。
总言之,环路补偿环节,是为了让电源在所有工况下都不会出现不稳定的情况。
-
理想电源的开环传递函数幅频特性:
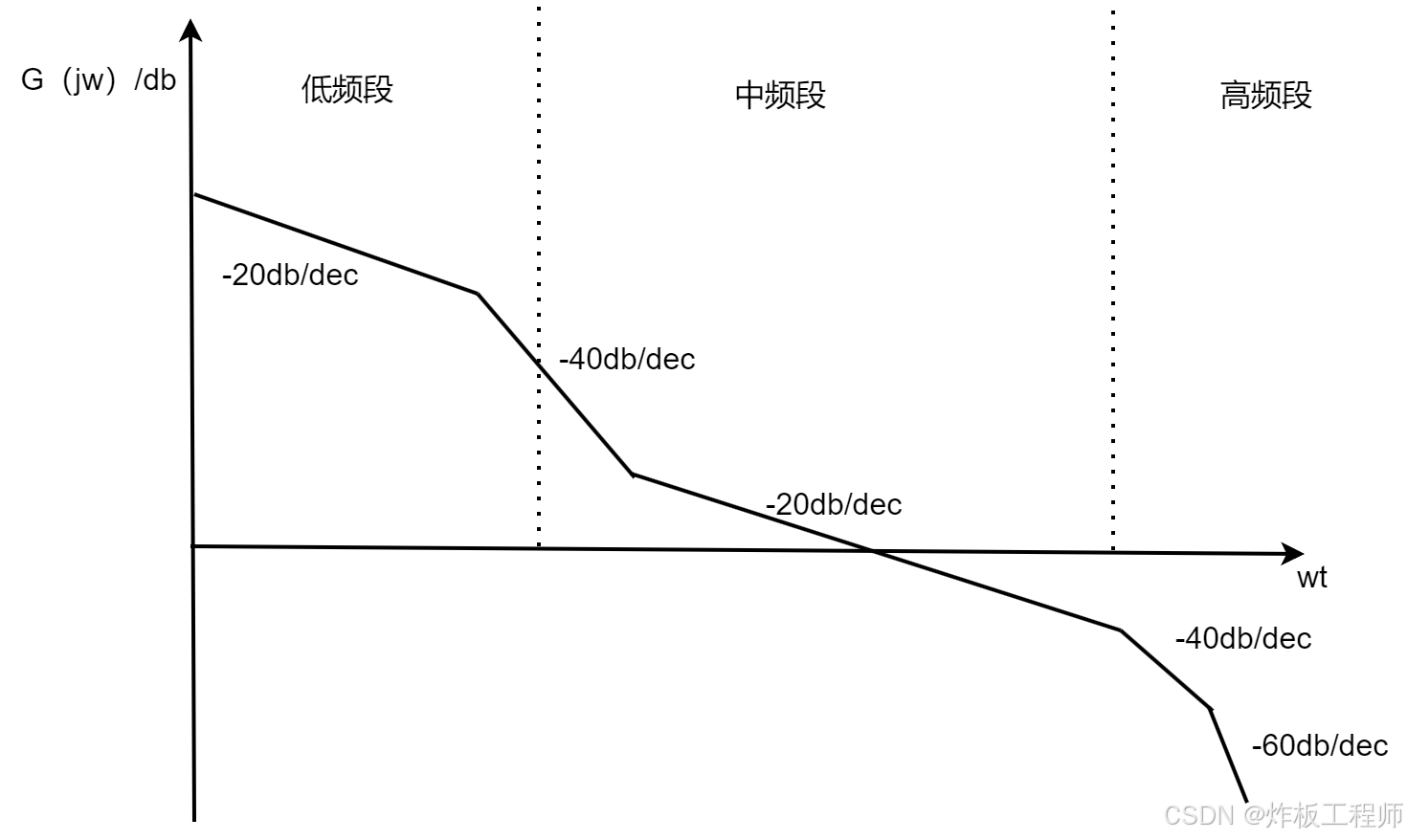
在低频段,开环传递函数反映了系统包含积分环节的个数和直流增益的大小,它主要影响系统的稳态性能。
在中频段,大致是以-20db/dec的斜率下降并穿越0db线。中频段的宽度与系统的动态稳定性密切相关,宽度越大,相位裕量越大;穿越频率越高,系统的响应越快但超调量也越高。对于开关系统,过高的穿越频率可能导致开关频率及其谐波、寄生振荡引起额高频分量无法有效抑制,引起系统的不稳定。因此理想的中频特性中,可以增加一个极点,使得曲线以-40db/dec的斜率下降,然后在中频段的合适位置再通过一个零点提升增益。这两个点的频段不能太大,否则会引起较大的相位滞后,影响系统的稳定性。
在高频段,此时频率已经远离穿越频率点,对系统的动态性能影响不大,主要反映系统对高频干扰的抑制能力。我们希望高频段衰减越快越好。
-
LC滤波器的ESR零点
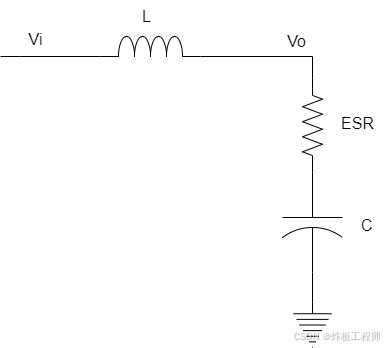
假设电容的ESR不存在,,可见双极点位于
处。
当电容存在ESR时,
通常ESR的值比较小,对于极点的影响可以忽略不记。但是ESR的存在会在处增加一个零点,这会导致增益的增加。特别是在高频段,增益的增加会增加高频噪声干扰的机会,还可能导致稳定性的问题,这点是需要注意的。
-
三种补偿拓扑
I型补偿:
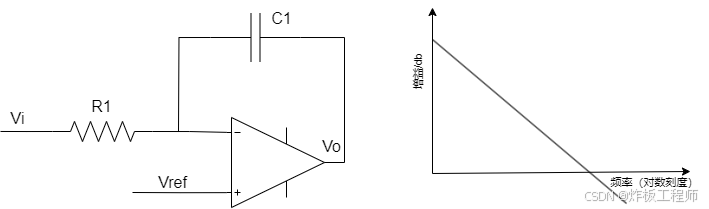
I型补偿是最简单的。电容C1引入了一个极点,其频率在处,极点的存在使得增益曲线-20db/dec。这种补偿方式会使得整个系统的增益下降,电源的截止频率变低,对于任何输入或负载的变化都变得缓慢,因此在很多电路中都不适用。但在一些特殊情况下就很合适,例如全新的样机第一次上电,需要人为迫使其无条件稳定,这样可以评估和优化预期设计的所有静态特性。
II型补偿:
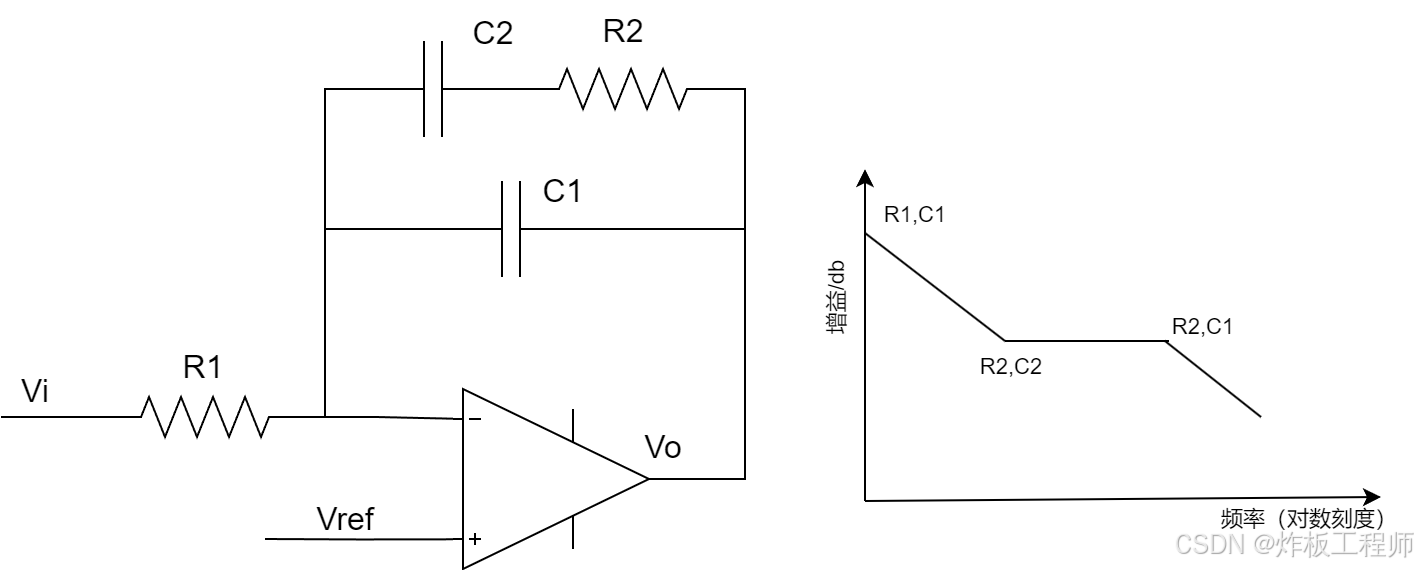
II型补偿在低频段和I型补偿一样,在频率0处存在一个极点,增益由R1与C1决定。随后R2与C2构成一个零点,使得增益增加。这里通常会把这个零点设置在LC滤波器的极点频率处以抵消双极点带来的增益降低。而R1、R2的取值决定了中间水平段曲线的增益。最后,R2与C1引入一个极点,会设置在LC滤波器的ESR零点频率处,用于抵消ESR零点的影响。
II型补偿并不能满足大多数电压控制型的系统。在具有正增益的情况下,初始极点和LC滤波器的剩余极点总相位将达到180度,会导致系统不稳定。然而II型补偿非常适合电流控制模式的电路,因为在电流控制模式下输出滤波器的截止频率以内只有一个极点,同样,在DCM模式下,由于系统是一阶的,II型补偿也很适用。
III型补偿:
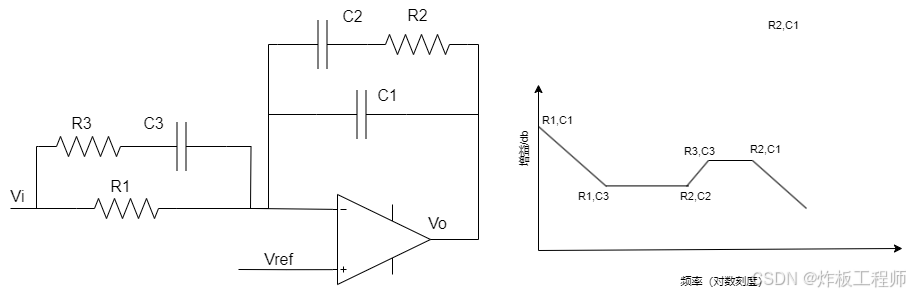
III型补偿具2两个零点和3个极点。首先第一个极点位于频率处,和I型补偿一样。然后我们在LC滤波器的双极点频率处,设置两个零点,用于提高增益和相位。这两个零点分别由R1,C3和R2,C2确定。再然后,在LC滤波器的ESR零点频率处设置一个极点,用来消除ESR带来的增益增加。最后,通常在开关频率或者更高频率处设置最后一个极点,使得在高频段增益下降,总增益小于1,满足稳定性的要求。
III型补偿虽然比较复杂,但适应性非常好,能够满足大部分电源应用。如何设计一个III型补偿电路?这里有一个设计实例非常值得参考。
电源规格:
Vin=3.3V(3.6V max)
Vout=1.2V
最大负载电流=10A
开关频率:f=600kHz
Vref=700mV
PWM斜坡电压Vp=1.0V
电感L=0.68uH
输出电容C=470uF
电容ESR(max)=10 mohm
误差放大器的增益带宽积GBW=5MHz
由上一节可知,PWM级的增益为输入电压与斜坡电压的比值:
然后计算LC滤波器的双极点位置:
在这里还要考虑电容的ESR引入的零点。电容的ESR具有负温度系数,设计时还需要考虑其最低温度的情况:
由于我们希望开关电源能够对快速变化的负载有较好的动态响应,这里需要很宽的带宽,所以宜采用III型补偿电路。根据采样定理,采样频率为信号频率的2倍才能不失真还原信号,而如果要提供线性控制,则需要在一个开关周期里采样5次。这就意味着控制环路的截止频率不应高于开关频率的20%。在这个例子里,截止频率设置为100kHz是一个合理的值。
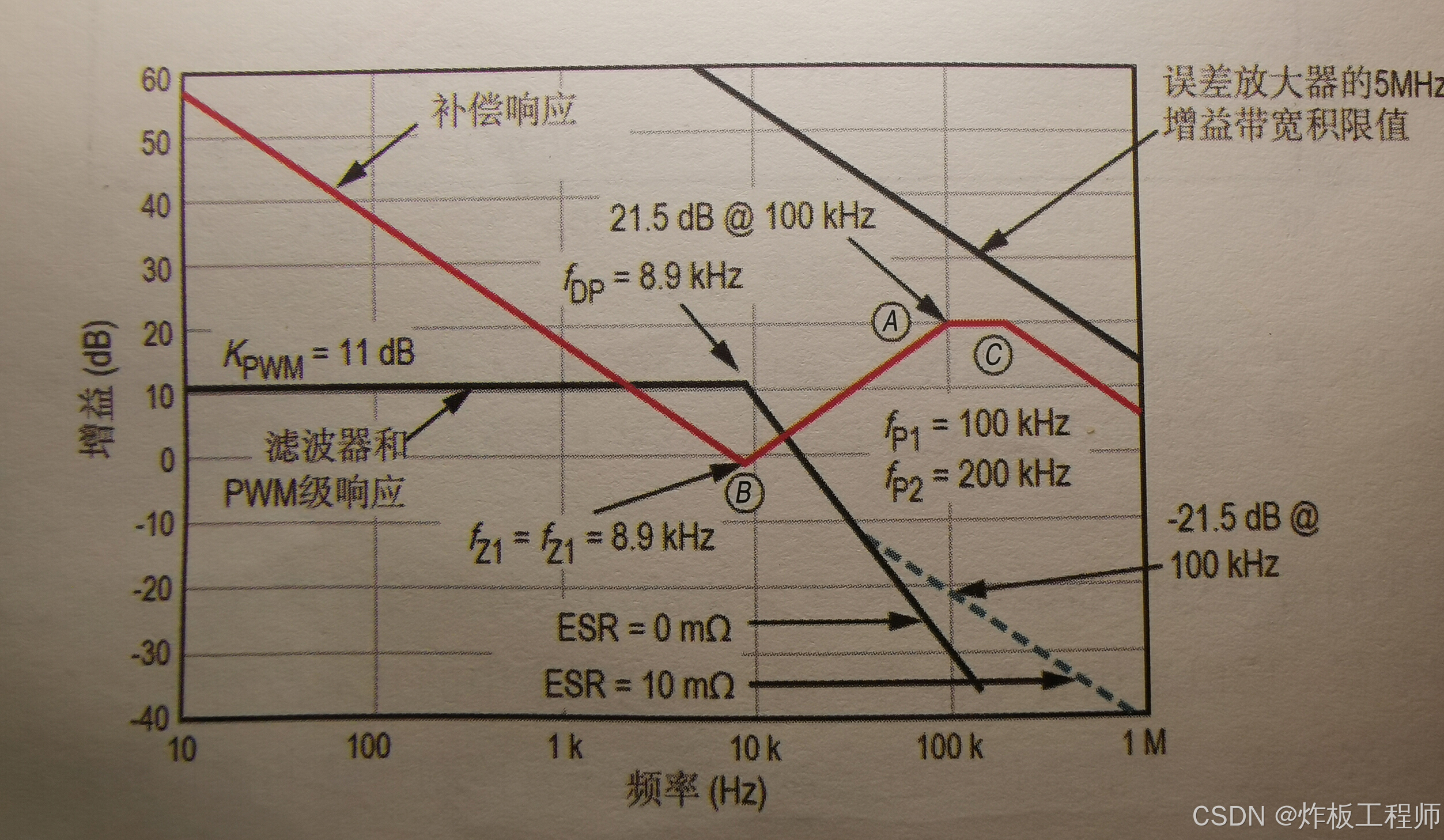
应当注意到,传递函数里的不同环节的增益相乘,反应到波特图上就是不同增益曲线值的相加。在f=8.9kHz处放置两个零点,用于补偿滤波器的增益下降,补偿网络的增益将从-20db/dec变为+20db/dec。在100kHz频率处设置一个极点,设置f=100kHz处,增益为+21.5db,这样与滤波器增益的-21.5db相加刚好使得环路增益为0,即为截止频率点。
到这里,我们的III型补偿还有一个极点需要设置。由于运放增益带宽积的限制,最后一个极点的频率不能设置太高,在这里可以设为200kHz。最后需要注意的是,这里ESR按照最大值10m ohm计算,而随着ESR越来越小,截止频率点将从100kHz降低接近40kHz。
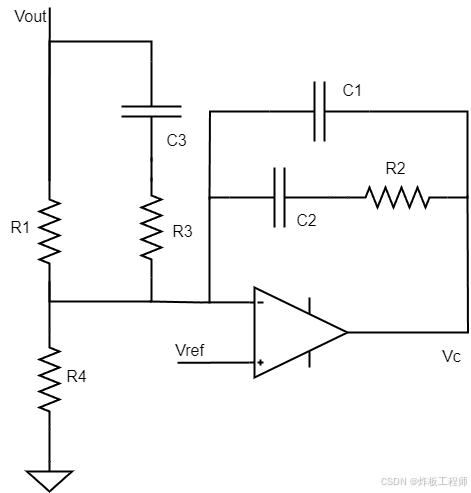
那么接下来就是最后一步——确定电路的参数。电路存在2个零点和3个极点,其中一个极点位于f=0处,其余4个可以由下式子确定。
这几个式子怎么来的呢?需要列出补偿网络的传递函数,然后分别令分子为零,得到零点;令分母为零,得到极点。以上式子仅仅是零极点的近似值(为了计算方便)。
我们看到,有些RC器件是相互耦合的,一个元件既影响零点,也会影响极点。由于R-C支路在更高的频率下起作用,就意味着R1>>R3,C2>>C1。
这里R4为分压电阻,无论R4取何值,根据虚短可知其上端电压都为Vref。它在电路中并不影响补偿网络的增益和相位,可以先确定这个参数,这里选定为10K。
那么:
知道了R1,就可以算出C3:
得到C3后,又可以确定R3:
现在知道增益补偿的目标是在环路截止频率处,补偿电路的增益为21.5db或者说是12V/V。而这个增益是由R2和R1//R3的比例决定的。(增益需要从传递函数中得到,将传递函数化为尾1标准型):
知道R2后,可以求出C2:
最后再计算C1的值:
到这里,整个环路补偿电路就设计完成了。
参考:
《电源设计基础》第6章 6.5、6.6节
《开关变换器的建模与控制》第4章4.2节


















 2622
2622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









