







基于最小二乘法的磁力计椭球拟合方法
在写飞控代码时,必然要对磁力计的测量数据进行校正,本文将介绍一种简单实用的校正方法–基于最小二乘法的椭球拟合方法。
本文椭球拟合部分来自博文IMU加速度、磁力计校正--椭球拟合,本文对最小二乘估计进行了部分推导,最后使用实测的数据完成了磁力计的椭球拟合。
椭球拟合
磁力计在测量磁场强度时,在环境不变的情况下,传感器每个姿态感受磁场强度是相同的,磁力计测量的x,y,z轴值,在没有偏差且传感器内部x,y,z轴相互垂直的情况下,在三维空间中组成一个圆球面。但是磁力计存在Hard Iron Distortion和Soft Iron Distortion。使得x,y,z轴度量单位不相同,各轴也并非相互垂直,(说明一下,任意椭球的三个轴都是相互垂直的,几何上,椭球最长的轴与最短的轴相互垂直,从代数的角度看,对称正定矩阵 A = R ′ B R A=R^{\prime} B R A=R′BR,其中 B B B为对角线大于0表示各轴长度的对角矩阵, R R R为旋转矩阵, R ′ R = I R^{\prime} R=I R′R=I,所以磁通量的空间坐标虽然形成一个椭球,椭球各轴相互垂直,但这个垂直的轴已经不是传感器 x , y , z x,y,z x,y,z轴了)椭球球心也并非[0,0,0],坐标磁通量在三维空间组成的椭球球心,是磁力计的校准值的一部分。
数学模型:
我们让磁力计尽可能多地采集到空间各个方向上的磁场强度,最后的测量数据将会形成空间上的一个椭圆,而校正问题在于给定椭球球面上的点,如何求椭球球心。其实就是一个椭球拟合问题。
a 1 x 2 + a 2 y 2 + a 3 z 2 + a 4 x y + a 5 x z + a 6 y z + a 7 x + a 8 y + a 9 z = 1 a_{1} x^{2}+a_{2} y^{2}+a_{3} z^{2}+a_{4} x y+a_{5} x z+a_{6} y z+a_{7} x+a_{8}y+a_{9} z=1 a1x2+a2y2+a3z2+a4xy+a5xz+a6yz+a7x+a8y+a9z=1
从几何的角度表示上式的椭球为:
[
x
−
c
x
y
−
c
y
z
−
c
z
]
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
T
[
λ
1
0
0
0
λ
2
0
0
0
λ
3
]
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
[
x
−
c
x
y
−
c
y
z
−
c
z
]
\left[ \begin{array}{ccc}{x-c_{x}} & {y-c_{y}} & {z-c_{z}}\end{array}\right] \left[ \begin{array}{ccc}{r_{11}} & {r_{12}} & {r_{13}} \\ {r_{21}} & {r_{22}} & {r_{23}} \\ {r_{31}} & {r_{32}} & {r_{33}}\end{array}\right]^{T} \left[ \begin{array}{ccc}{\lambda_{1}} & {0} & {0} \\ {0} & {\lambda_{2}} & {0} \\ {0} & {0} & {\lambda_{3}}\end{array}\right] \left[ \begin{array}{ccc}{r_{11}} & {r_{12}} & {r_{13}} \\ {r_{21}} & {r_{22}} & {r_{23}} \\ {r_{31}} & {r_{32}} & {r_{33}}\end{array}\right] \left[ \begin{array}{c}{x-c_{x}} \\ {y-c_{y}} \\ {z-c_{z}}\end{array}\right]
[x−cxy−cyz−cz]⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤T⎣⎡λ1000λ2000λ3⎦⎤⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤⎣⎡x−cxy−cyz−cz⎦⎤
=
1
+
[
c
x
c
y
c
z
]
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
T
[
λ
1
0
0
0
λ
2
0
0
0
λ
3
]
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
[
c
x
c
y
c
z
]
=1+\left[ \begin{array}{lll}{c_{x}} & {c_{y}} & {c_{z}}\end{array}\right] \left[ \begin{array}{ccc}{r_{11}} & {r_{12}} & {r_{13}} \\ {r_{21}} & {r_{22}} & {r_{23}} \\ {r_{31}} & {r_{32}} & {r_{33}}\end{array}\right]^{T} \left[ \begin{array}{ccc}{\lambda_{1}} & {0} & {0} \\ {0} & {\lambda_{2}} & {0} \\ {0} & {0} & {\lambda_{3}}\end{array}\right] \left[ \begin{array}{ccc}{r_{11}} & {r_{12}} & {r_{13}} \\ {r_{21}} & {r_{22}} & {r_{23}} \\ {r_{31}} & {r_{32}} & {r_{33}}\end{array}\right] \left[ \begin{array}{c}{c_{x}} \\ {c_{y}} \\ {c_{z}}\end{array}\right]
=1+[cxcycz]⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤T⎣⎡λ1000λ2000λ3⎦⎤⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤⎣⎡cxcycz⎦⎤
写成矩阵形式:
[
X
−
C
]
M
[
X
−
C
]
T
=
1
+
C
M
C
T
[X-C] M[X-C]^{T}=1+C M C^{T}
[X−C]M[X−C]T=1+CMCT
X
M
X
T
−
2
C
M
X
T
+
C
M
C
T
=
1
+
C
M
C
T
X M X^{T}-2 C M X^{T}+C M C^{T}=1+C M C^{T}
XMXT−2CMXT+CMCT=1+CMCT
其中
X
=
[
x
y
z
]
X=\left[ \begin{array}{lll}{x} & {y} & {z}\end{array}\right]
X=[xyz]表示椭球上的点,
C
=
[
c
x
c
y
c
z
]
C=\left[ \begin{array}{lll}{c_{x}} & {c_{y}} & {c_{z}}\end{array}\right]
C=[cxcycz]表示椭球的球心;
M
=
R
T
B
R
=
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
T
[
λ
1
0
0
0
λ
2
0
0
0
λ
3
]
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
=
[
a
1
a
4
/
2
a
5
/
2
a
4
/
2
a
2
a
6
/
2
a
5
/
2
a
6
/
2
a
3
]
M=R^{T} B R=\left[ \begin{array}{ccc}{r_{11}} & {r_{12}} & {r_{13}} \\ {r_{21}} & {r_{22}} & {r_{23}} \\ {r_{31}} & {r_{32}} & {r_{33}}\end{array}\right]^{T} \left[ \begin{array}{ccc}{\lambda_{1}} & {0} & {0} \\ {0} & {\lambda_{2}} & {0} \\ {0} & {0} & {\lambda_{3}}\end{array}\right] \left[ \begin{array}{ccc}{r_{11}} & {r_{12}} & {r_{13}} \\ {r_{21}} & {r_{22}} & {r_{23}} \\ {r_{31}} & {r_{32}} & {r_{33}}\end{array}\right]=\left[ \begin{array}{ccc}{a_{1}} & {a_{4} / 2} & {a_{5} / 2} \\ {a_{4} / 2} & {a_{2}} & {a_{6} / 2} \\ {a_{5} / 2} & {a_{6} / 2} & {a_{3}}\end{array}\right]
M=RTBR=⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤T⎣⎡λ1000λ2000λ3⎦⎤⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤=⎣⎡a1a4/2a5/2a4/2a2a6/2a5/2a6/2a3⎦⎤
可得球心的表达形式:
C
=
−
1
2
[
a
7
,
a
8
,
a
9
]
(
M
)
−
1
C=-\frac{1}{2}\left[a_{7}, a_{8}, a_{9}\right](M)^{-1}
C=−21[a7,a8,a9](M)−1
其他参数:
S
S
=
C
M
C
T
+
1
S S=C M C^{T}+1
SS=CMCT+1
椭球
x
x
x轴长度:
x
s
c
a
l
e
=
S
S
λ
1
x_{s c a l e}=\sqrt{\frac{S S}{\lambda_{1}}}
xscale=λ1SS
椭球
y
y
y轴长度:
y
s
c
a
l
e
=
S
S
λ
2
y_{s c a l e}=\sqrt{\frac{S S}{\lambda_{2}}}
yscale=λ2SS
椭球
z
z
z轴长度:
z
s
c
a
l
e
=
S
S
λ
3
z_{s c a l e}=\sqrt{\frac{S S}{\lambda_{3}}}
zscale=λ3SS
接下来就是如何使用最小二乘法从测量数据中求出椭圆的9个参数。
最小二乘估计
下面举一个最小二乘估计的简单例子:
假设有下列
r
r
r组观测数据
[
(
x
1
,
y
1
)
,
…
(
x
r
,
y
r
)
]
[(x_1,y_1),…(x_r,y_r)]
[(x1,y1),…(xr,yr)]
若待估计的形式为
y
=
a
x
2
+
b
x
+
c
y=ax^2+bx+c
y=ax2+bx+c
则有
y i = ( x i 2 x i 1 ) ( a b c ) \boldsymbol{y}_{i}=\left( \begin{array}{ccc}{\boldsymbol{x}_{i}^{2}} & {\boldsymbol{x}_{i}} & {1}\end{array}\right) \left( \begin{array}{l}{\boldsymbol{a}} \\ {\boldsymbol{b}} \\ {\boldsymbol{c}}\end{array}\right) yi=(xi2xi1)⎝⎛abc⎠⎞
即
Y = H K Y=HK Y=HK
H = ( x 1 2 x 1 1 x 2 2 x 2 1 ⋮ ⋮ ⋮ x r 2 x r 1 ) \boldsymbol{H}=\left( \begin{array}{ccc}{\boldsymbol{x}_{1}^{2}} & {\boldsymbol{x}_{1}} & {1} \\ {\boldsymbol{x}_{2}^{2}} & {\boldsymbol{x}_{2}} & {1} \\ {\vdots} & {\vdots} & {\vdots} \\ {\boldsymbol{x}_{r}^{2}} & {\boldsymbol{x}_{r}} & {1}\end{array}\right) H=⎝⎜⎜⎜⎛x12x22⋮xr2x1x2⋮xr11⋮1⎠⎟⎟⎟⎞
最优估计问题转换成线性方程组的求解。
当 H H H列满秩时(即观测量数目大于待定参数数目时),方程有解,此时左右同时乘 H H H的最小二乘逆(左逆) i n v ( H ) = ( H T H ) − 1 H T inv(H)=(H^T H)^{-1}H^T inv(H)=(HTH)−1HT
那么
k = ( a b c ) = ( H T H ) − 1 H T Y \boldsymbol{k}=\left( \begin{array}{c}{\boldsymbol{a}} \\ {\boldsymbol{b}} \\ {\boldsymbol{c}}\end{array}\right)=\left(\boldsymbol{H}^{T} \boldsymbol{H}\right)^{-1} \boldsymbol{H}^{T} \boldsymbol{Y} k=⎝⎛abc⎠⎞=(HTH)−1HTY
最终得到线性方程组的解,即为最小二乘解(确定的 k k k对所有的测量参数都适用,实际上,最小二乘解保证了误差的平方和最小,证明过程参见博文大疆笔试中的涉及矩阵最小二乘求解思路)
同样的,对磁力计椭球拟合来讲,其待估计的形式为:
a 1 x 2 + a 2 y 2 + a 3 z 2 + a 4 x y + a 5 x z + a 6 y z + a 7 x + a 8 y + a 9 z = 1 a_{1} x^{2}+a_{2} y^{2}+a_{3} z^{2}+a_{4} x y+a_{5} x z+a_{6} y z+a_{7} x+a_{8}y+a_{9} z=1 a1x2+a2y2+a3z2+a4xy+a5xz+a6yz+a7x+a8y+a9z=1
可以写成如下形式
1 = ( x 2 y 2 z 2 x y x z y z x y z ) ( a 1 ⋮ a 9 ) 1=\left( \begin{array}{llllllllll}{x^{2}} & {y^{2}} & {z^{2}} & {x y} & {x z} & {y z} & {x} & {y} & {z}\end{array}\right) \left( \begin{array}{c}{a_{1}} \\ {\vdots} \\ {a_{9}}\end{array}\right) 1=(x2y2z2xyxzyzxyz)⎝⎜⎛a1⋮a9⎠⎟⎞
我们将所有的观测数据带入可得:
( 1 1 ⋮ 1 ) = ( x 1 2 y 1 2 z 1 2 ⋯ x 1 y 1 z 1 x 2 2 y 2 2 z 2 2 ⋯ x 2 y 2 z 2 ⋮ ⋮ ⋮ ⋱ ⋮ ⋮ ⋮ x r 2 y r 2 z r 2 ⋯ x r y r z r ) ( a 1 a 2 ⋮ a 9 ) \left( \begin{array}{c}{1} \\ {1} \\ {\vdots} \\ {1}\end{array}\right)=\left( \begin{array}{ccccccc}{x_{1}^{2}} & {y_{1}^{2}} & {z_{1}^{2}} & {\cdots} & {x_{1}} & {y_{1}} & {z_{1}} \\ {x_{2}^{2}} & {y_{2}^{2}} & {z_{2}^{2}} & {\cdots} & {x_{2}} & {y_{2}} & {z_{2}} \\ {\vdots} & {\vdots} & {\vdots} & {\ddots} & {\vdots} & {\vdots} & {\vdots} \\ {x_{r}^{2}} & {y_{r}^{2}} & {z_{r}^{2}} & {\cdots} & {x_{r}} & {y_{r}} & {z_{r}}\end{array}\right) \left( \begin{array}{c}{a_{1}} \\ {a_{2}} \\ {\vdots} \\ {a_{9}}\end{array}\right) ⎝⎜⎜⎜⎛11⋮1⎠⎟⎟⎟⎞=⎝⎜⎜⎜⎛x12x22⋮xr2y12y22⋮yr2z12z22⋮zr2⋯⋯⋱⋯x1x2⋮xry1y2⋮yrz1z2⋮zr⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛a1a2⋮a9⎠⎟⎟⎟⎞
求上述方程的最小二乘解:
k = ( a 1 a 2 ⋮ a 9 ) = ( H T H ) − 1 H T Y k=\left( \begin{array}{l}{a_{1}} \\ {a_{2}} \\ {\vdots} \\ {a_{9}}\end{array}\right)=\left(H^{T} H\right)^{-1} H^{T} Y k=⎝⎜⎜⎜⎛a1a2⋮a9⎠⎟⎟⎟⎞=(HTH)−1HTY
即可求得最优估计的椭圆参数。
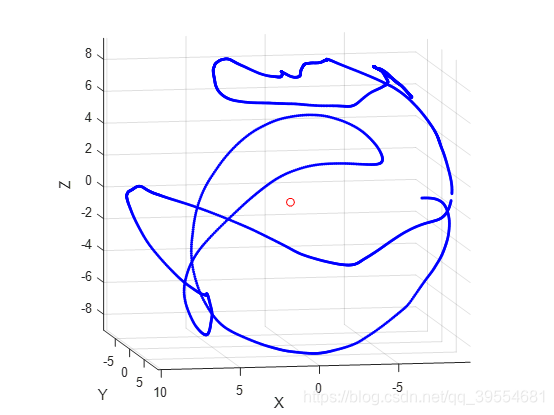
matlab平台下的磁力计校正
将MPU9250的磁力计测量数据通过嵌入式平台导入上位机,再在matlab平台下进行椭球拟合,值得注意的是磁力计的测量数据应当尽量遍历空间中的各个指向,这样才能得到更精确的拟合效果(图中的采样数据较少);如效果图所示,拟合算法基本能精确计算出椭球球心位置,这表示了磁力计三轴的偏移量,而实际飞控代码中也应对磁力计初始数据减去该偏移量。















 3852
3852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









