






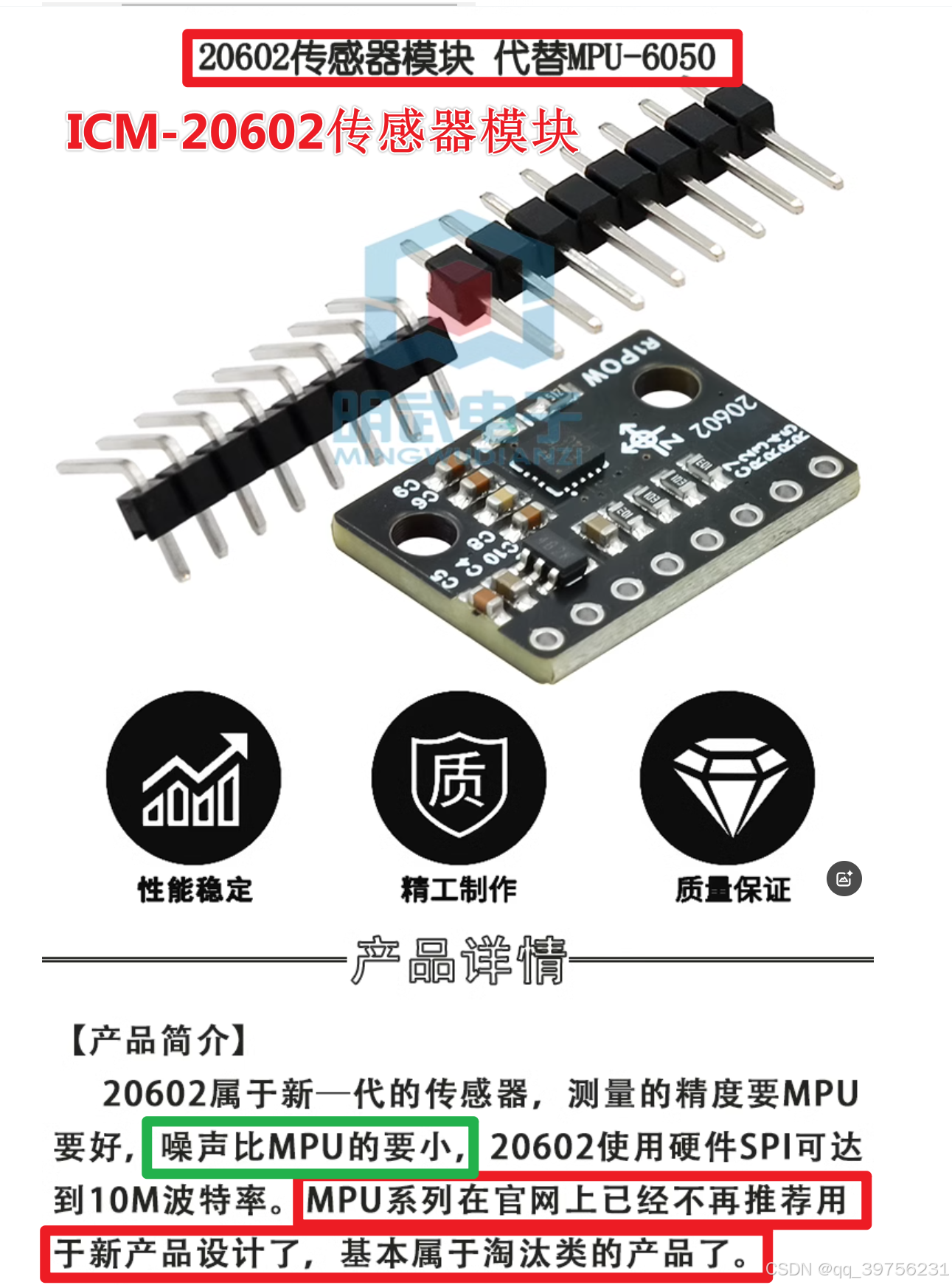
首先:MPU6050系列属于十多年前的老产品。
(在unity仿真中,数据的噪音对PID的调节影响非常巨大,如果噪音太大就需要更多的滤波就会带来更多延迟,会导致四旋翼反应慢。如果噪音再大点,就算滤波了,飞行器在平衡位置也会有很小幅度的抖动不稳定)总结就是,PID实际上对数据质量的要求很高。
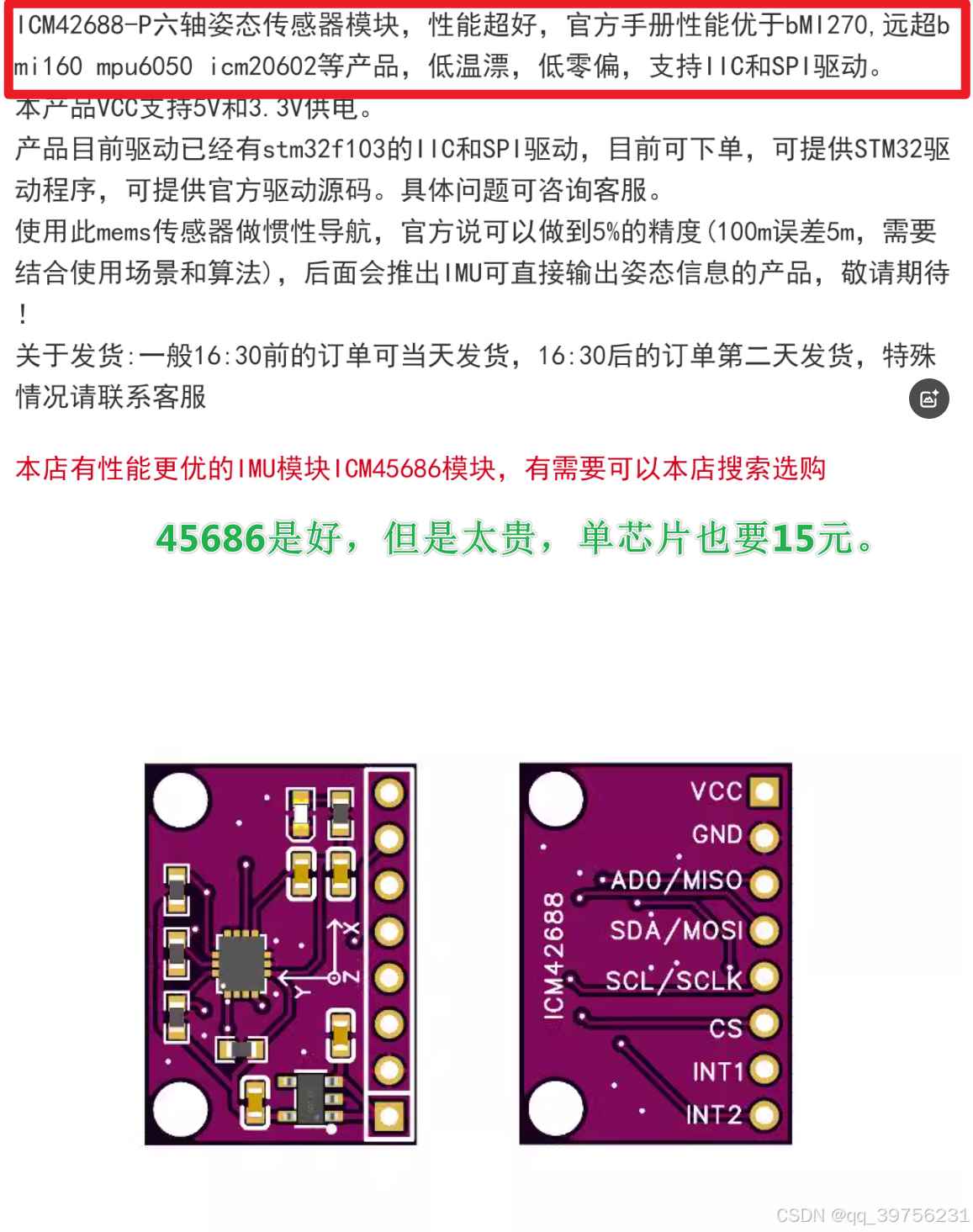
新产品1介绍
(直接买模块的价格要30元,只买中间芯片的话10元)
新产品2(本人已购买,还没到货2025.1.1)
(直接买模块的话20元,单买中间芯片5元)
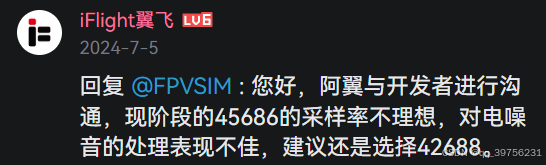
(也有说45686不够好的)
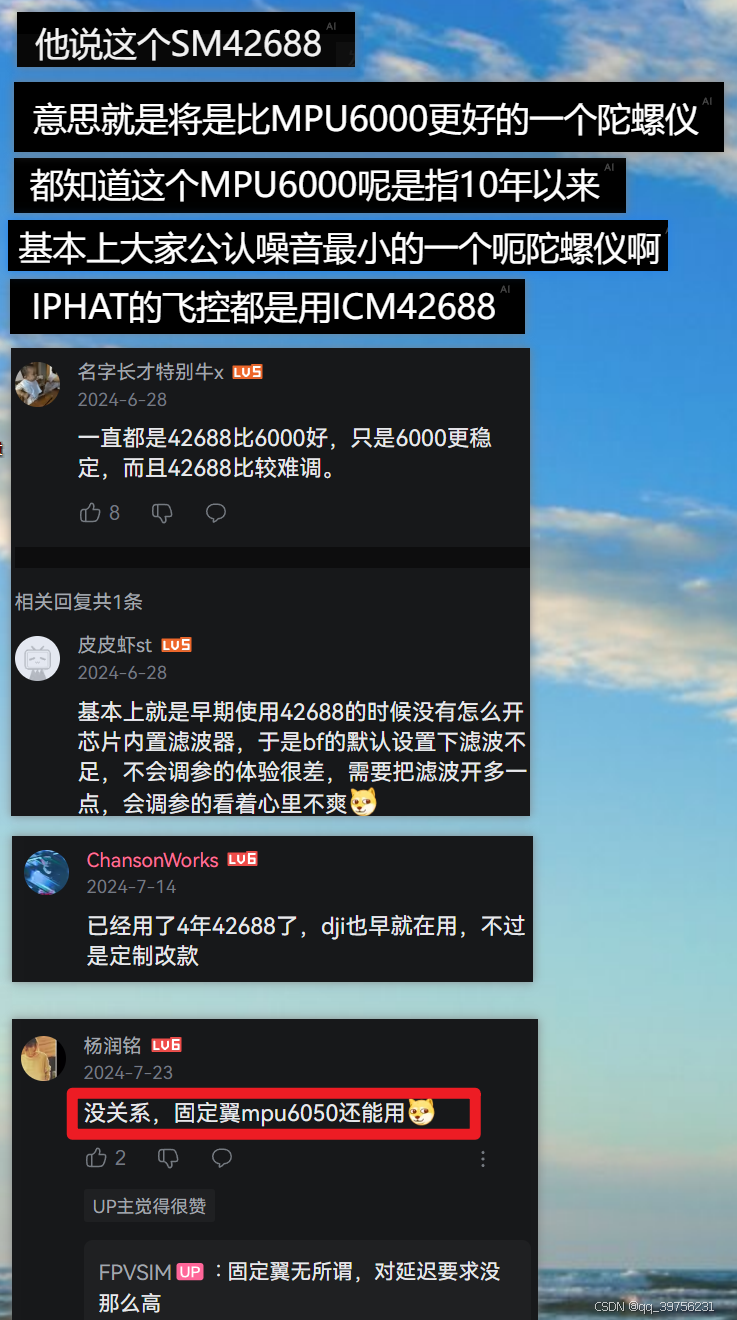
最后放上一些零散的证据引用
【重磅】Betaflight陀螺仪新王登基! ICM42688超MPU6000 - 对比分析及配置方法_哔哩哔哩_bilibili

















 913
913

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









