







文章目录
前言
本系列介绍了常用图像测试卡的使用方法,以及通过imatest图像质量分析软件分析摄像头拍摄图卡的成像质量
一、可测图像质量指标
通常在可控光源环境(灯箱/实验室/实景)里拍摄色卡可用于测试相机如下图像质量指标:
(1)色彩。 包括color accuracy(色精度)、white balance(白平衡)、saturation(饱和度)等。
(2)噪声。 包括noise(噪声)、SNR(信噪比)、visual noise(视觉噪声)等。
(3)响应(Tonal Response),动态范围(Dynamic Range),Gamma等。
二、测试及操作流程

2.1 拍摄环境要求
距离:
手机/相机正对色卡拍摄,并保证色卡占预览面积的70%左右,光源包括D65、TL84、CWF、A光等;注:距离不是关键,无需用图卡填充整个画面,只需要2400像素(100/patch)就可分析色彩和白平衡(不含噪声);
照度:
a、20-45度入射角,均匀度偏差不超过5%
b、18-22%的中灰色背景,且曝光误差在1/4 f-stop以内,才能保证L*、a*、b*颜色值正确;
2.2 测试卡导入流程及选项解析
2.2.1 测试卡导入流程
①导出图片到Imatest Master工具中,点击"Colorcheck";

②将拍摄好的24色卡照片导入,再点击选择整个图像,出现如下界面:

③通过下图1、2、3 区域,可以调整感兴趣区域,Imatest 会分析这些区域,需要保证每个蓝色小方框都能准确框在24色卡对应的色块内。

④选择好感兴趣区域以后点击是的,继续按钮,会弹出以下设置界面:

2.2.2 测试卡选项解析
模式选择如红框,可选择专家或简化模式,按标准设置按钮,会选择常用设置(初学者选择Simplified),下面对各选项进行解析:

①Colorchecker reference: 就是制作色卡的参考标准(L*、a*、b*值的差异),具体根据当前使用色卡参考的标准来选择即可(购买的色卡包装上都有注明)


②Color space: 颜色空间,是表示颜色的一种数学方法,用表示颜色的基本参数来描述和记录颜色,通常用三维模型来定义颜色空间,空间中的颜色用代表三个颜色属性参数的三个维度的坐标指定;这里选择sRGB即可(除了sRGB,还有DCI-P3、NTSC、Adobe RGB等)
③Nonuniformity correction: 针对照明条件不佳,导致画面照度的不均匀,而进行的非均匀性校正(若可以保证环境均匀性偏差不超过5%,即可不用执行;)

④ISO Speed: 感光度相关计算,默认不用 ( 如果为空白或零,则不会计算灵敏度);

以下为参数显示设置:是设置结果数据的显示形式、计算标准

①Noise display, pixel nosie or SNR : 选择噪声结果显示方式,一般选择 Pixel SNR= 20*log10(S/N) , 单位dB,S越大,N越小,信噪比越大,图像质量越好;

②Color error display: 颜色误差显示,对应不同的计算色差的标准,CIE1976、CIE1994、CIE2000, 后两者更准确,反映了眼睛对高度饱和度颜色变化的敏感性降低。 因此它们的测量值通常较低 ;

CIE1976:是在Lab*色域空间上,计算 测量值 与标准值空间两点的几何距离,但对于高饱和度的色彩计算不准确;
CIE1994:相较于CIE1976, 对于高饱和度的颜色计算要准确的多;
CMC: 用于纺织工业;
CIE2000:是推荐用的最准确的色差方程;
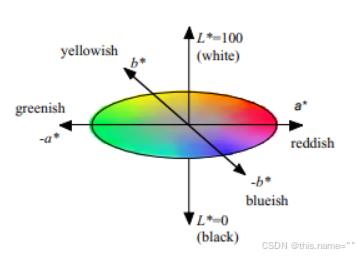
CIE Lab 颜色空间,
L 表示的是亮度,范围是0 到100。
a 和b 表示的是色度。范围-128 到+128。a<0 偏绿色,a>0 偏红色,b<0
偏蓝色,b>0 偏黄色。
CIE lab 色差表示方法中:
ΔL 表示亮度差,为正偏亮,为负偏暗。
Δa 为正偏红,为负偏绿。
Δb 为正偏黄,为负偏蓝。
ΔE 为色差的综合评定指标,综合了ΔL、Δa 和Δb。
ΔC 没有考虑亮度差L。
③a*b* Color error:选择显示, 颜色误差的标准偏差 ( σ ) 或最大颜色误差(max),ΔC的Mean值是一定显示的,ΔC的Maximum和sigma择一显示;
④余下的参数,选默认值即可:

——Patch for noise spectrum:噪声测试的色块选择;
——Plot 4 tone adjustment:容许椭圆展示(会在 3.1 a * b * 颜色误差图 中展示),可按需在a* b* color error图上选择对应容许椭圆进行展示,各厂商可自己定义,其反映的是色彩空间中两个颜色点之间的色差,椭圆半径越小说明对色差的容许越苛刻

⑤按需plot相应的图表:

三、输出数据解读
3.1 a * b * 颜色误差图
表示色彩偏差(ΔC、ΔE)、饱和度(Saturation)测试结果:
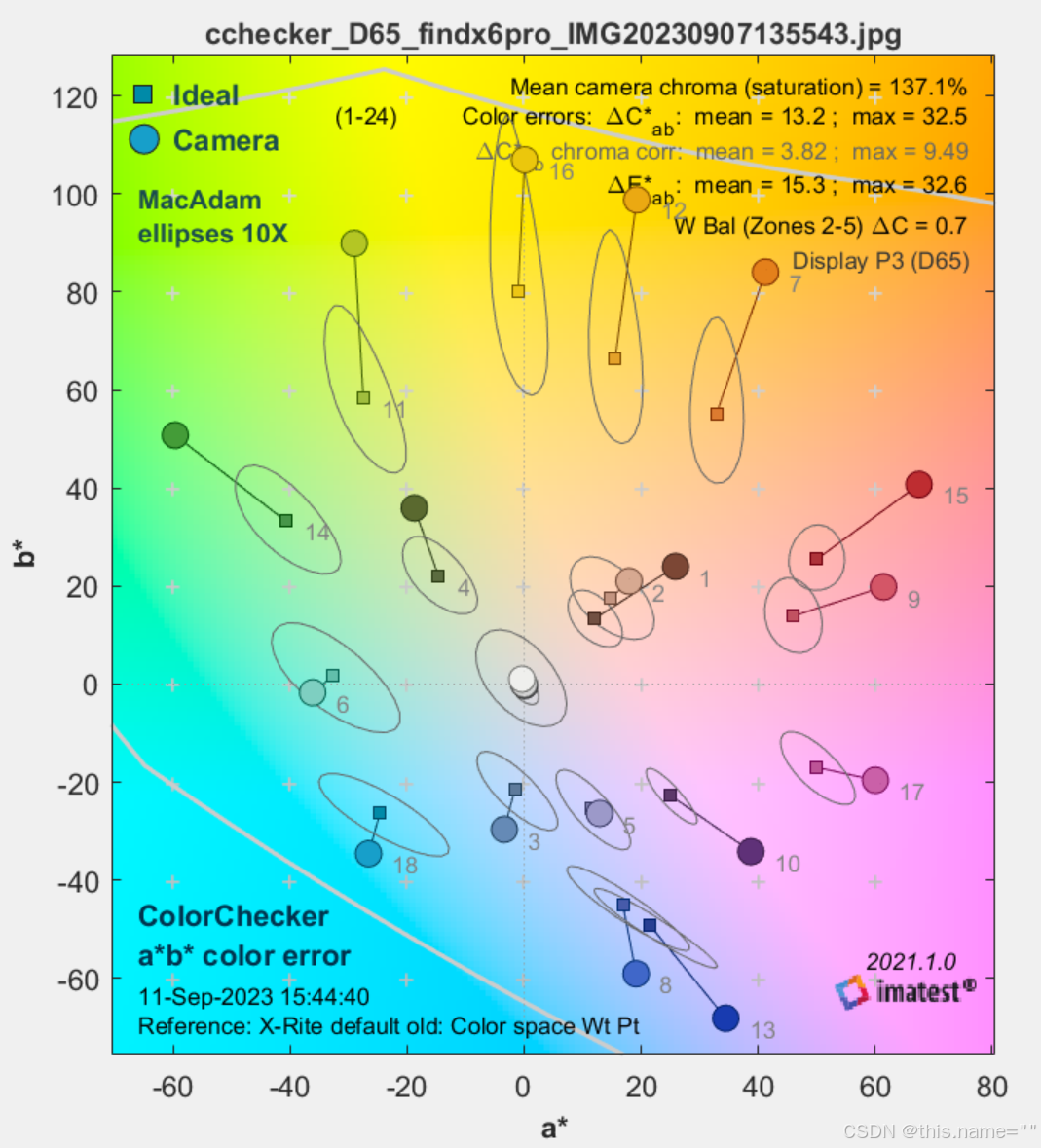
3.1.1 图例说明
①右上图描述的就是CIELAB 颜色空间的 a*b* 平面上的颜色误差,其中 a*是水平轴(绿-红),b*是垂直轴(蓝-黄);
②左上图中的 方块表示理想的(a*,b*)颜色坐标值,由上面的 2.2.1 ①ColorChecker reference 设置选择。 圆圈是测量出的(a*,b*)值;
③ 正方形和圆形附近的数字对应colorchecker 色块编号:1-6在第一行,7-12在第二行,13-18在第三行,19-24(底行)的数字被省略,因为它们的(a*,b*)值聚集在(0,0)附近;
④左图的背景显示了L*( L* = 0生成黑色而L* = 100指示白色)大约 0.9 的预期颜色。它呈现了与 a* 和 b* 相关的色调的合理图片(尽管它们随L*发生了一些变化)。浅灰色曲线是L (HSL) = 0.5 时色彩空间 (sRGB) 的色域边界(CIELAB 边界难以计算)。
⑤ ΔE*ab(其包括亮度L*),ΔC( 仅限颜色;省略L*)。
3.1.2 关键参数说明
各理想落点外围均绘制有MacAdam椭圆或类椭圆,椭圆以理想落点为中心,代表了当前标准下各色块的色差容许范围。如图所示,色块5的实测落点位于椭圆内则代表色差可接受;色块10的实测落点位于椭圆外则代表当前色差过大超出容许范围。
①Mean camera chroma (%):是相机颜色的平均色度(饱和度)除以理想色块颜色的平均色度(饱和度),大于100%说明成像系统对饱和度进行了增强,大部分成像系统为了更生动的呈现物体会提高饱和度,但不宜超过
120%。
注:当饱和度>100%。饱和度会提高,它受到镜头质量(劣质镜头的眩光会降低饱和度)和信号处理的影响。许多相机和大多数RAW转换器有调整饱和度的功能。 RAW 转换期间的图像处理(尤其是 色彩校正矩阵 (CCM) )会严重影响饱和度。相机输出的图像通常会提高饱和度以使其更加生动(110-120% 在紧凑型数码相机中很常见),但提高饱和度会导致高饱和物体的细节丢失。饱和度超过 120% 应被视为过度。
②ΔC*ab chroma corr:代表的是没有亮度差y、只有a 和b,并且进行了饱和度矫正的色差。
③ΔC*ab uncorr:代表的是没有亮度色差y,也没有进行饱和度校准的色差。
④ΔE*ab:代表的是包含亮度差值,并且没有进行饱和度校准的色差。
3.2 标准色块对照图
下图色块从左到右,从上到下编号1-24,可以用来比较实际值和理想值,还可使用色块19-24显示白平衡错误;

曝光测试结果

3.2.1 色块含义

①区域 1 是所拍摄的色块。对应于上面 L* a* b* 颜色误差图中的圆圈。
②区域 2 是色块的参考值,根据所拍摄图表的亮度进行校正。校正是从上述灰色区域的二阶拟合导出的。默认情况下以HSL颜色完成,但可以在 HSL、 HSV、 xyY或 L* a* b* 之间进行选择。
注:区域 1 和 2 的平均亮度应该接近(区域 2 可能在某些色块中更暗,而在其他色块中更亮)。
③区域 3是没有亮度校正的色块的理想值。对于所有色块,区域 2 的亮度将始终比区域 3 更亮或更暗,具体取决于曝光
3.2.2 色块白平衡误差
下图反映了当前色卡图像的白平衡误差,该误差以4种方式量化如下:

① ΔC2000 。 CIE2000标准下的偏色误差指标,最接近人眼感知。
② HSV色彩模型中的饱和度S。 S的值介于0(表示完美的中性灰)到1(表示完全饱和的颜色)之间。白平衡误差往往在灰块上表现最为明显(对应底行为2-5色块)。对于 S < 0.02,几乎看不见。对于 S > 0.10 来说,这是相当严重的WB误差。图像质量管控中通常会参考这一数值来评判当前相机的白平衡表现。
底部的图像显示 夸大了白平衡误差,这是通过使用下方曲线提高饱和度 S 计算得出的,同时保持 H 和 V 不变。低饱和度值提高了 4 倍;提升随着饱和度的增加而减少。这张图片比不夸张的图表更清楚地显示了白平衡错误。 请记住,此图像比现实更糟糕;在实际照片中,小的白平衡误差可能并不明显,尤其是在强烈饱和的颜色附近。

③ CCT(相关色温)误差,单位为开尔文。 以K为单位的色温通常用于指定照明环境,比如D65(6500K),D50(5000K)。CCT误差反映的是照明色温的变化,通常较高的色温呈现为更多的蓝色,感知上会“更冷”;较低色温呈现为黄色,感知上会“更暖”。
④ 以Mireds为单位的反色温(微倒数度)(蓝色),其中 Mireds = 106/(开尔文度)。 比 CCT 误差在感知上更统一的指标。它用于指定光学色彩校正滤光片的强度,但在数字时代使用不多,因为很少需要这种滤光片。
3.3 灰度色调响应和噪声图

3.3.1 ColorCheckr analysis(左上方的图)

该图为色卡中第4行灰色方块的密度响应。它包括:
蓝、绿色虚线: 一阶和二阶拟合。
横轴 Log Exposure(减去目标密度) : 印在ColorChecker的背面。如果曝光误差小于0.25(最大推荐误差),则显示淡红色,否则显示为粗体红色(Uneven illumination(H & V))。
Gamma(对比度): 是 log pixel level 作为 log exposure ( d(log pixel level)/d(log exposure) )的函数的平均斜率,底部行块2-5(白色和黑色块除外)。
3.3.2 Pixel SNR(左下方的图)

显示了像素信噪比(dB),SNR(dB)=20*log10(Si/Ni), 其中其中这里只包含 patch19 到 patch24 这6个色块的信息,Si为第 i 个色块的信号,Ni为第 i 个色块的噪声(pixel level 的标准差,去除缓慢变化);
SNR_BW 是基于 White – Black patches (patch 19 – patch 24; density difference = 1.45 其设计相对独立于图表类型。(对于各种灰度图,它在Stepchart中计算)和系统对比度(gamma)。)
SNR_BW=20 *log10(SWHITE-SBLACK/ Nmid),其中Nmid是patch 22(其最接近标称图表密度= 0.7)。
3.3.3 Density response(右上方的图)

显示了色卡中第3行色块的噪声,其中包含颜色最强烈的色块:蓝色、绿色、红色、黄色、洋红和青色。在某些相机中,噪声可能随颜色而变化。在灰色区域中看不到的问题,在这些色块中可能是显而易见的。注意,x轴刻度(log exposure)与左边的图是相反的。
3.4 噪声细节图(仅限Imatest Master)
显示密度响应,f-stops噪声(与眼睛的工作相对应的相对测量),第三个Colorchecker行噪声,其中包含原色,以及所选patch的噪声频谱。

3.4.1 Density response(显示密度响应,左上方的图)

是色卡中第4行,灰色方块的密度响应。它包括一阶和二阶拟合(蓝色和绿色虚线)。
横轴是 Log Exposure(减去目标密度),印在ColorChecker的背面。
如果Exposure error<0.25(最大推荐误差),则显示为淡红色,否则显示为粗体红色。如果已输入指示lux,则显示ISO灵敏度。
Gamma(对比度)是 log pixel level 作为 log exposure ( d(log pixel level)/d(log exposure) )的函数的平均斜率,底部行块2-5(白色和黑色块除外)。
3.4.2 Colorchecker行噪声(右上方的图)

显示了色卡中第3行色块的噪声或信噪比,其中包含颜色最强烈的色块:蓝色、绿色、红色、黄色、洋红和青色。在某些相机中,噪声可能随颜色而变化。在灰色区域中看不到的问题,在这些色块中可能是显而易见的。
3.4.3 f-stops噪声(左下方的图)

显示了R, G, B和Y(亮度)RMS噪声作为Log Exposure每个patch的函数。RMS噪声用f-stops表示,f-stops是一种与人眼工作密切相关的测量方法。在步骤图中详细描述了这种测量方法。它在暗区最大,因为f-stops之间的像素间距最小。
3.4.4 Noise spectrum 噪声频谱(右下方的图)

显示了所选patch(色块21)的R, G, B, Y噪声谱。频谱传递有关信号处理的线索,例如,异常快速的衰减可能表明噪声降低过度。低空间频率下的高电平或红蓝噪声是典型的拜耳传感器。如果可用,则显示EXIF数据中的ISO速度和曝光时间。
3.5 CSV文件内容分析
****_summary.csv为结果输出文件,包含Colorcheck的测试结果,格式如下:
3.5.1 基础信息
包含如下的一些软件版本、图片名称、路径、编译时间等信息;

3.5.2 White Balance Error 白平衡误差

Pixel代表测量出的19-24灰块的亮度,计算公式为: Brightness = 0.3 * R + 0.6 * G + 0.1 * B;最大值是255,Pixel/255是标准化的表示,pixel/255 ldeal是理想状态下的值;
Log(exp)、Log(px/255)是曝光值;
WB Err:白平衡误差的不同表示,常用WE ERR S(HSV)的值来判断,计算公式如下: S = M a x ( R , G , B ) − M i n ( R , G , B ) M a x ( R , G , B ) S=\frac{Max(R,G,B)-Min(R,G,B)}{Max(R,G,B)} S=
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8726
8726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









