







前言
在自动驾驶中,让汽车保持在车道线内是非常重要的,所以这次我们来说说车道线的检测。我们主要用到的是openCV, numpy, matplotlib几个库。主要包括下面这么几个步骤:
- 图像加载;
- 图像预处理:图片灰度化,高斯滤波;
- Cany边缘检测;
- 感兴趣区域检测;
- 霍夫直线检测 ;
- .直线拟合;
- 车道线叠加;
- 图片和视频测试;
- 可视化界面pyqt5
1、实现原理
输入输出
输入:一张摄像机拍摄到的道路图片,图片中需要包含车道线。如下图所示。

输出:图像坐标系下的左右车道线的直线方程和有效距离。将左右车道线的方程绘制到原始图像上,应如下图所示。

原始图像
认识图像前,我们需要先回顾一下在初中所学的物理知识——光的三原色,光的三原色分别是红色(Red)、绿色(Green)和蓝色(Blue)。通过不同比例的三原色组合形成不同的可见光色。如下图所示。
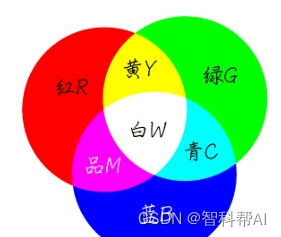
图像中的每个像素点都是由RGB(红绿蓝)三个颜色通道组成。为了方便描述RGB颜色模型,在计算机中约束了每个通道由暗到亮的范围是0~255。
当某个像素点的R通道数值为255,G和B通道数值为0时,实际表现出的颜色就是最亮的红色;当某个像素点的RGB三通道都为255时,所表示的是最亮的白色;当某个像素点的RGB三通道都为0时,就会显示最暗的黑色。在RGB颜色模型中,不会有比[255,255,255]的组合更亮的颜色了。
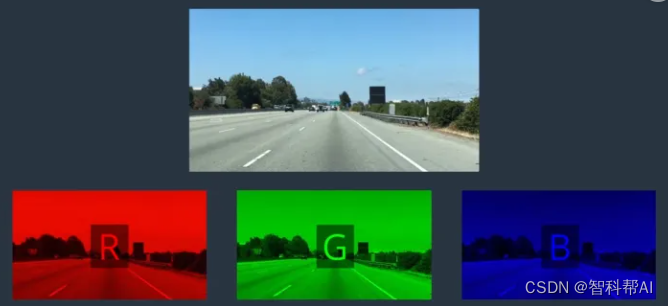
根据以上理论基础,一幅彩色图像,其实就是由三幅单通道的图像叠加,如下图所示。
以基于python的OpenCV为例,读取名为test_img.jpg的图片到计算机内存中的代码如下:
import cv2
img = cv2.imread('image_name.jpg')
读取图像后,我们可以将图像看做一个二维数组,每个数组元素中存了三个值,分别是RGB三个通道所对应的数值。
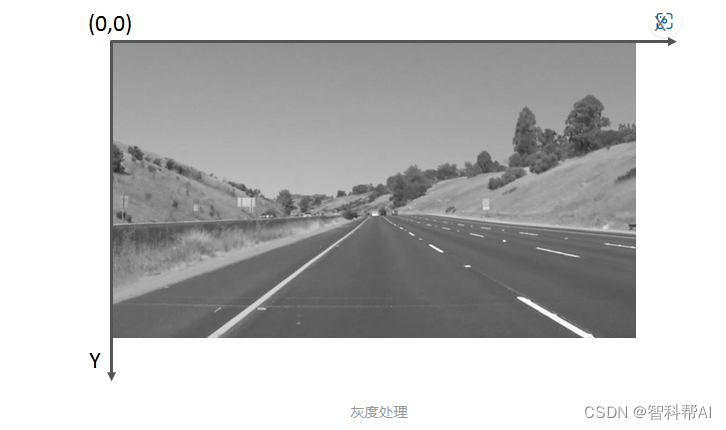
OpenCV定义了,图像的原点(0,0)在图片的左上角,横轴为X,朝右,纵轴为Y,朝下,如下图所示。

需要注意的是,由于OpenCV的早期开发者习惯于使用BGR顺序的颜色模型,因此使用OpenCV的imread()读到的像素,每个像素的排列是按BGR,而不是常见的RGB,代码编写时需要注意。
灰度处理
考虑到处理三个通道的数据比较复杂,我们先将图像进行灰度化处理,灰度化的过程就是将每个像素点的RGB值统一成同一个值。灰度化后的图像将由三通道变为单通道,单通道的数据处理起来就会简单许多。
通常这个值是根据RGB三通道的数值进行加权计算得到。人眼对RGB颜色的敏感度不同,对绿色最敏感,权值较高,对蓝色最不敏感,权值较低。坐标为(x,y)的像素点进行灰度化操作的具体计算公式如下:
图像灰度处理计算公式
调用OpenCV中提供的cvtColor()函数,能够方便地对图像进行灰度处理
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
由于使用cv2.imread()读到的img的数据排列为BGR,因此这里的参数为BGR2GRAY。
灰度处理后的图像如下图所示:
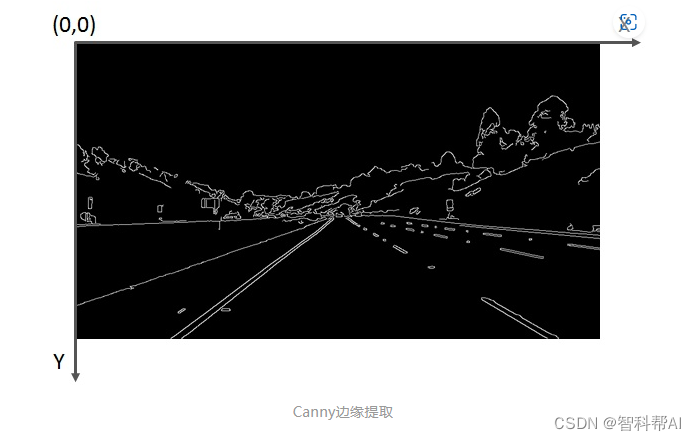
边缘提取
为了突出车道线,我们对灰度化后的图像做边缘处理。“边缘”就是图像中明暗交替较为明显的区域。车道线通常为白色或黄色,地面通常为灰色或黑色,因此车道线的边缘处会有很明显的明暗交替。
常用的边缘提取算法有Canny算法和Sobel算法,它们只是计算方式不同,但实现的功能类似。可以根据实际要处理的图像,选择算法。哪种算法达到的效果更好,就选哪种。
以Canny算法为例,选取特定的阈值后,对灰度图像进行处理,即可得到的边缘提取的效果图。
low_threshold = 40
high_threshold = 150
canny_image = cv2.Canny(gray, low_threshold, high_threshold)
感兴趣区域选择
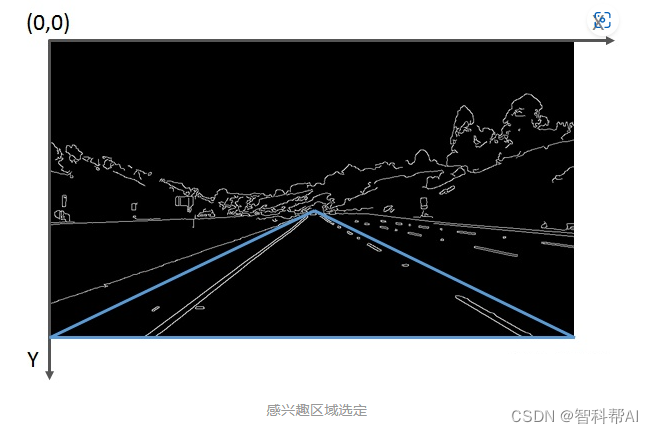
边缘提取完成后,需要检测的车道线被凸显出来了。为了实现自车所在车道的车道线检测,我们需要将感兴趣的区域(Region of Interest)提取出来。提取感兴趣区域最简单的方式就是“截取”。
首先选定一个感兴趣区域,比如下图所示的蓝色三角形区域。对每个像素点的坐标值进行遍历,如果发现当前点的坐标不在三角区域内,则将该点涂“黑”,即将该点的像素值置为0。
为了实现截取功能,可以封装一下OpenCV的部分函数,定义一个region_of_interest函数:
def region_of_interest(img, vertices):
#定义一个和输入图像同样大小的全黑图像mask,这个mask也称掩膜
#掩膜的介绍,可参考:https://www.cnblogs.com/skyfsm/p/6894685.html
mask = np.zeros_like(img)
#根据输入图像的通道数,忽略的像素点是多通道的白色,还是单通道的白色
if len(img.shape) > 2:
channel_count = img.shape[2] # i.e. 3 or 4 depending on your image
ignore_mask_color = (255,) * channel_count
else:
ignore_mask_color = 255
#[vertices]中的点组成了多边形,将在多边形内的mask像素点保留,
cv2.fillPoly(mask, [vertices], ignore_mask_color)
#与mask做"与"操作,即仅留下多边形部分的图像
masked_image = cv2.bitwise_and(img, mask)
return masked_image
封装完函数后,我们将感兴趣的区域输入,实现边缘提取后的图像的截取。
#图像像素行数 rows = canny_image .shape[0] 540行
#图像像素列数 cols = canny_image .shape[1] 960列
left_bottom = [0, canny_image .shape[0]]
right_bottom = [canny_image .shape[1], canny_image .shape[0]]
apex = [canny_image .shape[1]/2, 310]
vertices = np.array([ left_bottom, right_bottom, apex ], np.int32)
roi_image = region_of_interest(canny_image, vertices)
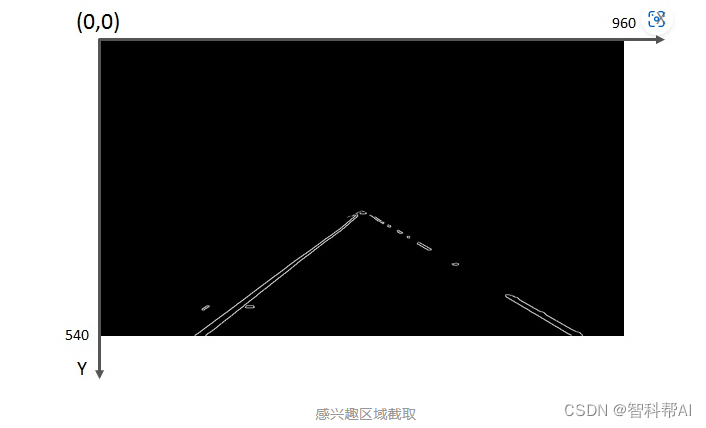
截取后的图像入下图所示:
霍夫变换
经过灰度处理、边缘检测、感兴趣区域截取后,我们终于将左右车道线从复杂的图像中提取出来了。接下来,我们使用霍夫变换来提取图像中的直线(段)。
霍夫变换是一种特征检测方法,其原理和推导过程可以参看经典霍夫变换(Hough Transform)。
在图像中使用霍夫变换不仅能够识别图像中的直线,还能识别出图像中的圆、椭圆等特征。OpenCV为我们提供了霍夫变换检测直线的函数,可以通过设置不同的参数,检测不同长度的线段。由于车道线存在虚线的可能,因此线段的检测长度不能设置地太长,否则短线段会被忽略掉。
OpenCV的霍夫变换直线检测函数使用方法如下:
rho = 2 # distance resolution in pixels of the Hough grid
theta = np.pi/180 # angular resolution in radians of the Hough grid
threshold = 15 # minimum number of votes (intersections in Hough grid cell)
min_line_length = 40 #minimum number of pixels making up a line
max_line_gap = 20 # maximum gap in pixels between connectable line segments
Hough Transform 检测线段,线段两个端点的坐标存在lines中
lines = cv2.HoughLinesP(roi_image, rho, theta, threshold, np.array([]),
min_line_length, max_line_gap)
封装一个绘图函数,实现把线段绘制在图像上的功能,以实现线段的可视化
def draw_lines(img, lines, color=[255, 0, 0], thickness=2):
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(img, (x1, y1), (x2, y2), color, thickness) # 将线段绘制在img上
将得到线段绘制在原始图像上
import numpy as np
line_image = np.copy(img) # 复制一份原图,将线段绘制在这幅图上
draw_lines(line_image, lines, [255, 0, 0], 6)
结果如下图:

可以看出,虽然右车道线的线段不连续,但已经很接近我们想要的输出结果了。
数据后处理
霍夫变换得到的一系列线段结果跟我们的输出结果还是有些差异。为了解决这些差异,需要对我们检测到的数据做一定的后处理操作。
实现以下两步后处理,才能真正得到我们的输出结果。
(1)计算左右车道线的直线方程:根据每个线段在图像坐标系下的斜率,判断线段为左车道线还是右车道线,并存于不同的变量中。随后对所有左车道线上的点、所有右车道线上的点做一次最小二乘直线拟合,得到的即为最终的左、右车道线的直线方程。
(2)计算左右车道线的上下边界:考虑到现实世界中左右车道线一般都是平行的,所以可以认为左右车道线上最上和最下的点对应的y值,就是左右车道线的边界。
基于以上两步数据后处理的思路,我们重新定义draw_lines()函数,将数据后处理过程写入该函数中。
def draw_lines(img, lines, color=[255, 0, 0], thickness=2):
left_lines_x = []
left_lines_y = []
right_lines_x = []
right_lines_y = []
line_y_max = 0
line_y_min = 999
for line in lines:
for x1,y1,x2,y2 in line:
if y1 > line_y_max:
line_y_max = y1
if y2 > line_y_max:
line_y_max = y2
if y1 < line_y_min:
line_y_min = y1
if y2 < line_y_min:
line_y_min = y2
k = (y2 - y1)/(x2 - x1)
if k < -0.3:
left_lines_x.append(x1)
left_lines_y.append(y1)
left_lines_x.append(x2)
left_lines_y.append(y2)
elif k > 0.3:
right_lines_x.append(x1)
right_lines_y.append(y1)
right_lines_x.append(x2)
right_lines_y.append(y2)
#最小二乘直线拟合
left_line_k, left_line_b = np.polyfit(left_lines_x, left_lines_y, 1)
right_line_k, right_line_b = np.polyfit(right_lines_x, right_lines_y, 1)
#根据直线方程和最大、最小的y值反算对应的x
cv2.line(img,
(int((line_y_max - left_line_b)/left_line_k), line_y_max),
(int((line_y_min - left_line_b)/left_line_k), line_y_min),
color, thickness)
cv2.line(img,
(int((line_y_max - right_line_b)/right_line_k), line_y_max),
(int((line_y_min - right_line_b)/right_line_k), line_y_min),
color, thickness)
根据对线段的后处理,即可得到符合输出要求的两条直线方程的斜率、截距和有效长度。将后处理后的结果绘制在原图上,如下图所示:

处理视频
视频其实就是一帧帧连续不断的图像,使用读取视频的库,将视频截取成一帧帧图像,然后使用上面的灰度处理、边缘提取、感兴趣区域选择、霍夫变换和数据后处理,得到车道线检测结果,再将图片结果拼接成视频,就完成了视频中的车道线检测。
2、安装使用步骤
Requirements - 必要条件
- python 3.x
- numpy
- matplotlib
- opencv-python
- pyqt5
Usage - 用法
- install.
$ cd LaneDetectionV1.0
$ pip install -r requirements.txt
- Test.
# picture test
$ python .\lanedetection.py -i ./assets/1.jpg -o ./assets/1_out.jpg
# video test
$ python .\lanedetection.py -i ./assets/project_video.mp4 -o ./assets/project_video_out.mp4
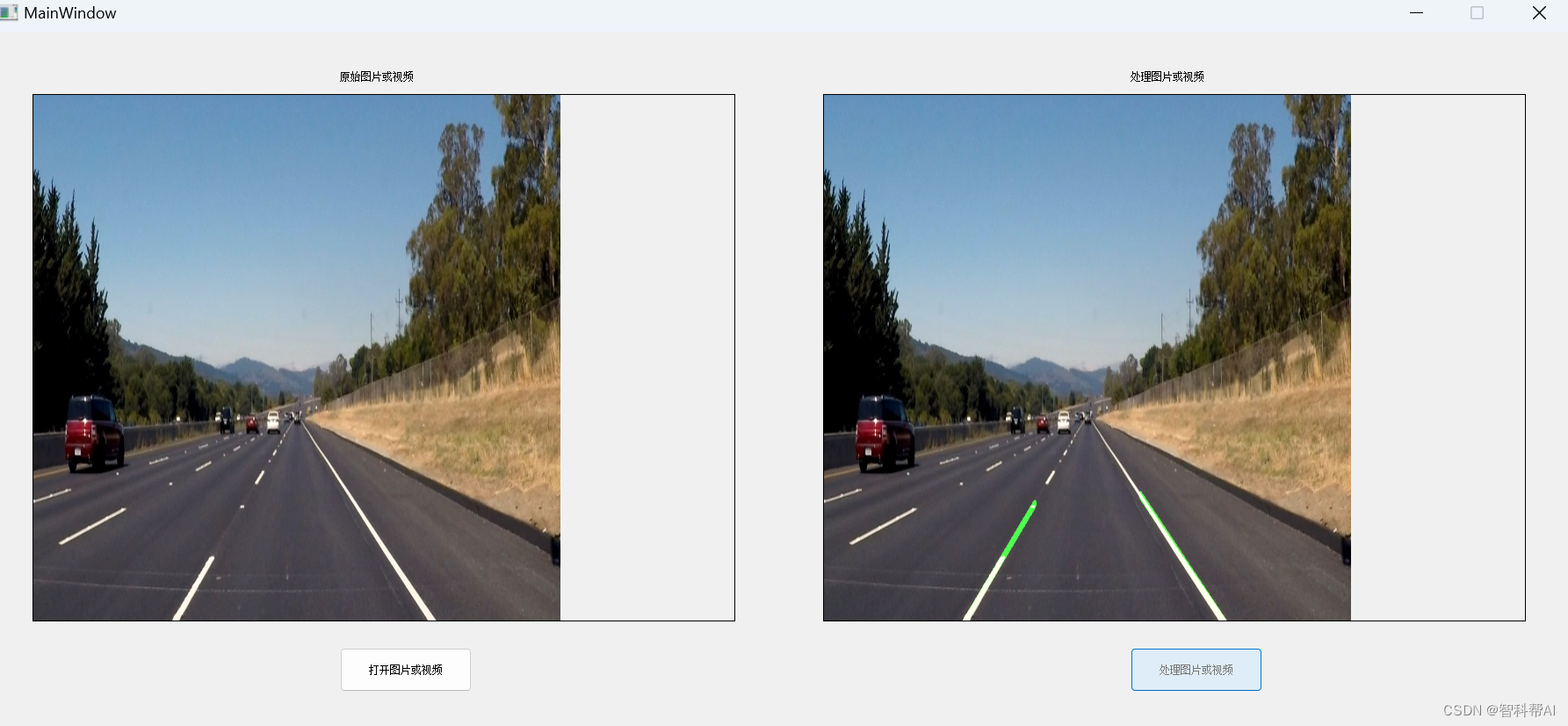
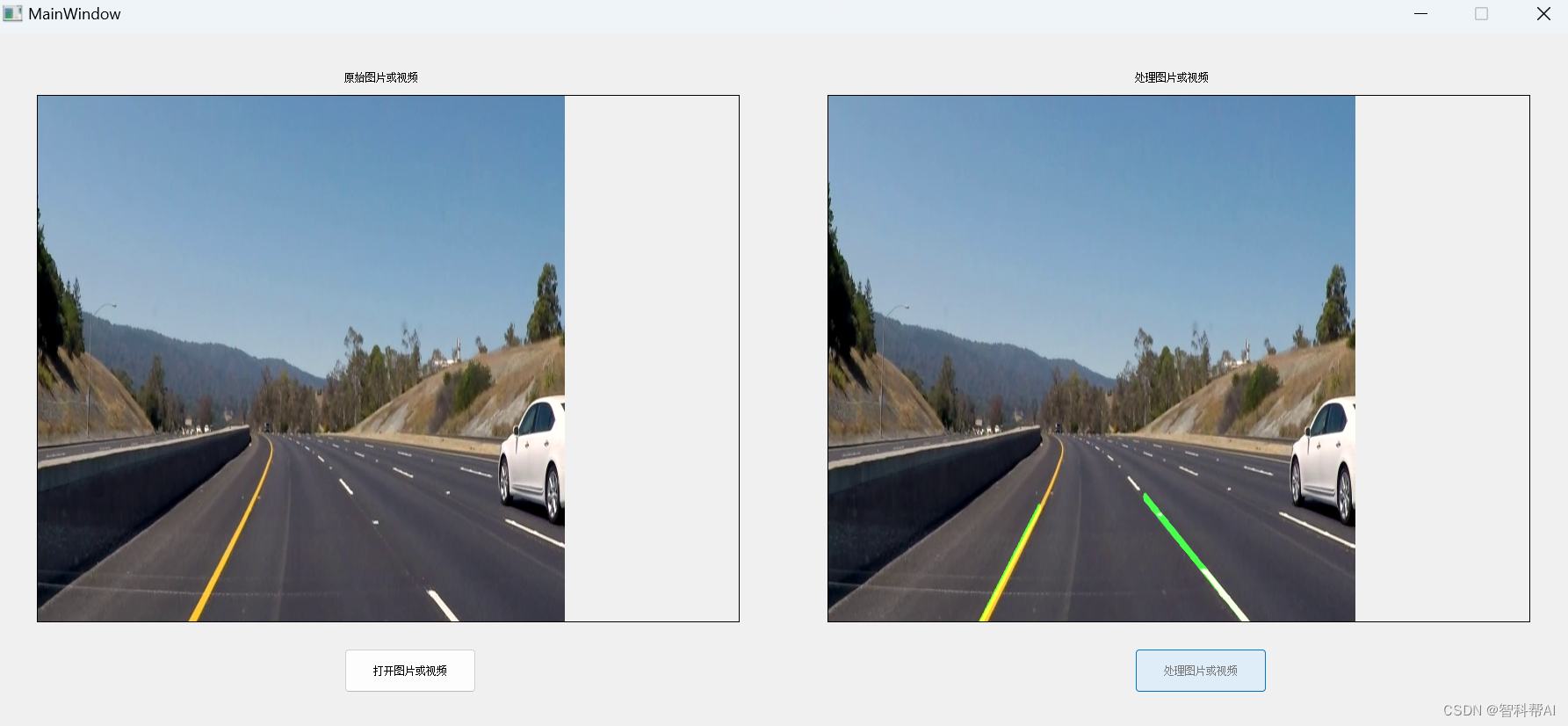
- Visualization.
# install package
$ pip install pyqt5
# run
$ python mainwindow.py
参考链接:https://zhuanlan.zhihu.com/p/630083399














 276
276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









