







 本文介绍了AutoSAR的基础软件模块通用规范,包括标准类型和基本软件模组的规范,重点解读了数据类型规范,如功能规范类型定义和应用程序接口规范类型定义,提供例如返回值、版本信息和状态类型的具体示例。
本文介绍了AutoSAR的基础软件模块通用规范,包括标准类型和基本软件模组的规范,重点解读了数据类型规范,如功能规范类型定义和应用程序接口规范类型定义,提供例如返回值、版本信息和状态类型的具体示例。
#AutoSAR 基础软件模块通用spec
我们都知道AutoSAR是一套适用于汽车各个系统域控制器及子系统控制器软件开发的方法论,可通过多个厂家工具链来实现,比如VECTOR、ETAS、CAPITAL还有SCADE等(SCADE是ANASYS旗下的一款软件开发平台集成了测试与在线模拟功能)。使用AutoSAR这套方法论的前提,必须要重点了解它定义的一些通用的要求规范。
接下来我们就按照规范中的划分,逐个来解读一下:
AutoSAR的2份通用规范:标准类型规范和基本软件模组通用规范
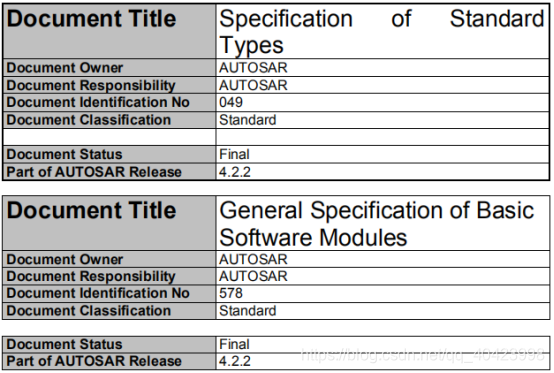
博主基于上述两份通用规范文档来进行解读,这两份文档都是来自于AutoSAR官方发布(All specs source from AutoSAR protal),如果你不记得官方链接的话,不用担心,可以翻找搜索博主之前发布的文章,官方链接、文件搜索方法以及文件云端系统哈希算法博主之前都解读过了。
数据类型规范
1 功能规范相关的类型定义文件有两个:SWS-Std-00004 SWS-Std-00014,不可更改,按照规范执行就可以了
2 应用程序接口规范类型定义;
举几个例子给你参考下,这几个例子看明白了,你自然就知道这份标准的用处。
比如ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4503
4503











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









